
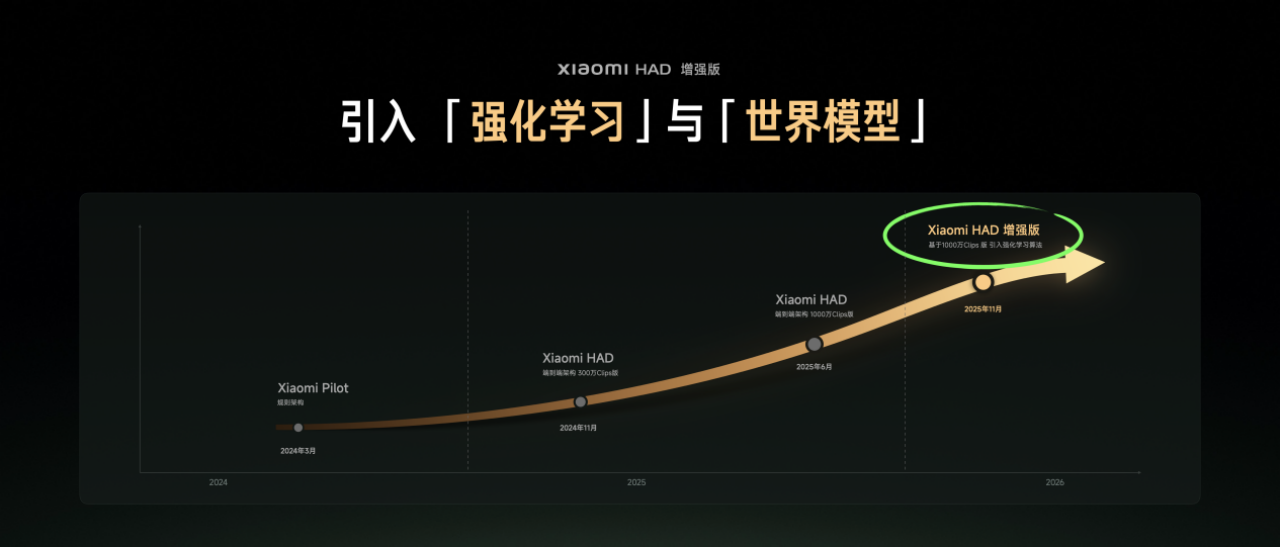
On November 21, at the Guangzhou Auto Show, Xiaomi Auto unveiled the enhanced version of Xiaomi HAD. This launch introduced the “Reinforcement Learning + World Model” training method for large models, enhancing Xiaomi HAD’s core driving capabilities in longitudinal acceleration and deceleration, lateral lane changes, and path selection. Through OTA updates, the enhanced Xiaomi HAD will be gradually rolled out to users with the HyperOS 1.11 series.
With the “Reinforcement Learning + World Model” framework, Xiaomi’s assisted driving has entered the “Cognition-Driven” phase. The world model acts as a simulation engine capable of generating vast scenarios, no longer relying on data randomly occurring on real roads, but based on Xiaomi’s self-built large-scale 4D digital asset library, creating massive, controllable, and reproducible training scenarios. The system can undergo targeted training in these virtual environments.

The core of reinforcement learning lies in “learning by doing,” where the algorithm practices repeatedly within the world model, continuously optimizing driving strategies through a reward mechanism. The high-fidelity world model possesses the ability to create scenes and environmental changes, simulating various typical scenarios and specific environments like sunny, rainy, and foggy conditions. Combined with an efficient training framework, the world model leverages an asynchronous mechanism with large-scale cluster management to achieve parallel training on multiple fronts.
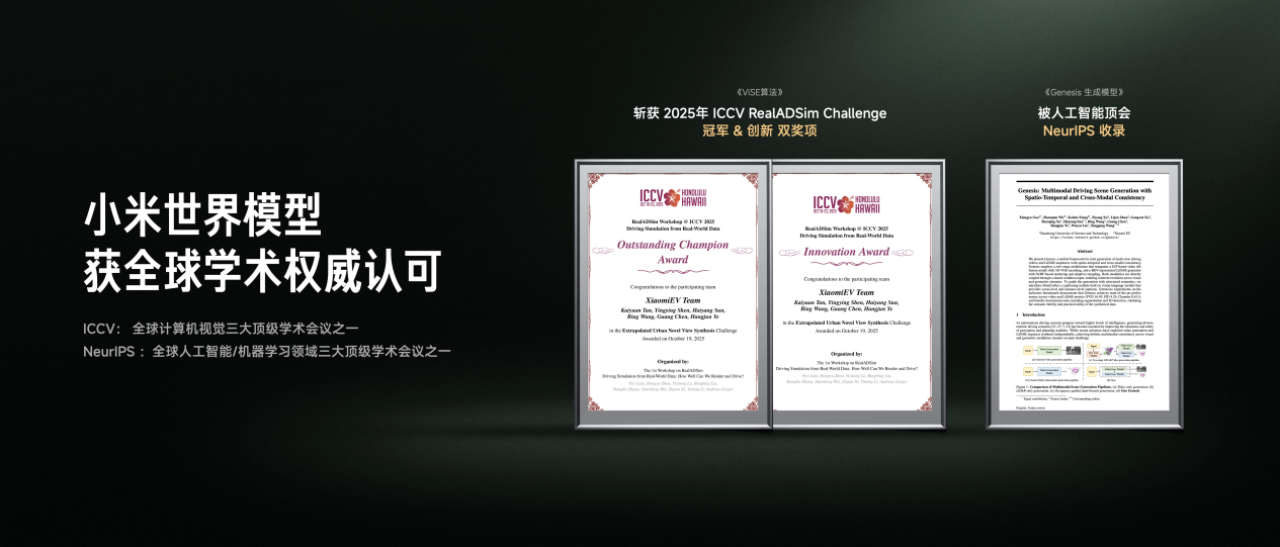
Xiaomi’s ViSE algorithm won the championship at the ICCV 2025 Autonomous Driving Simulation Synthetic Data Challenge, and the related paper was accepted by NeurIPS.
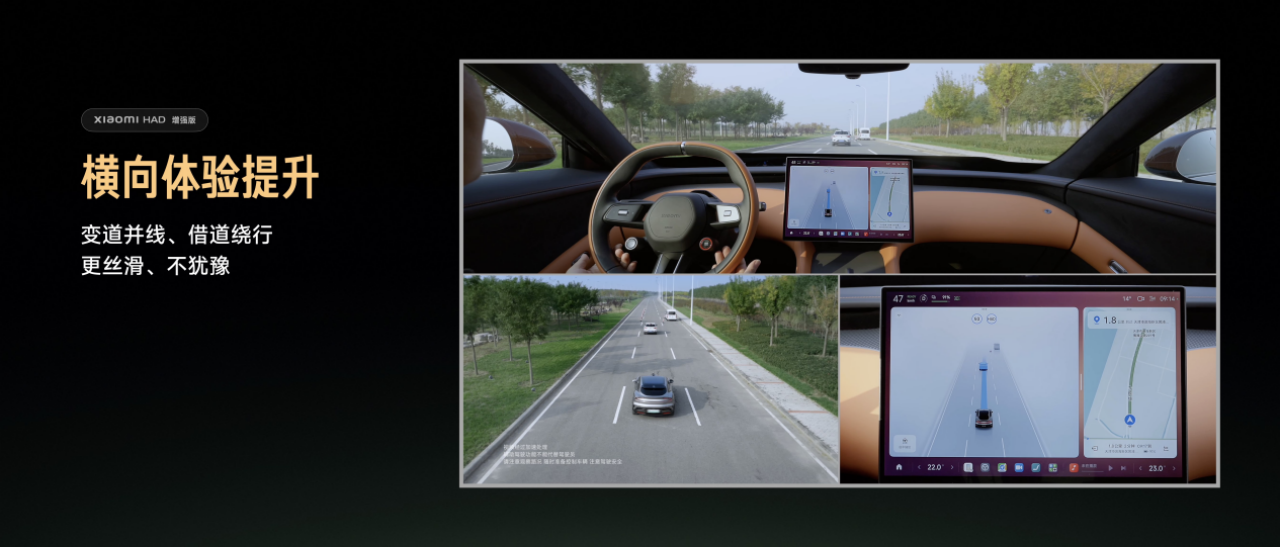
Following continuous training using “Reinforcement Learning + World Model,” the enhanced Xiaomi HAD has improved driving experiences. The system exhibits more refined performance in longitudinal acceleration and deceleration, lateral lane change, and path selection. Whether in urban congested areas, complex intersections, or highways, the system demonstrates human-like judgment and operational standards.
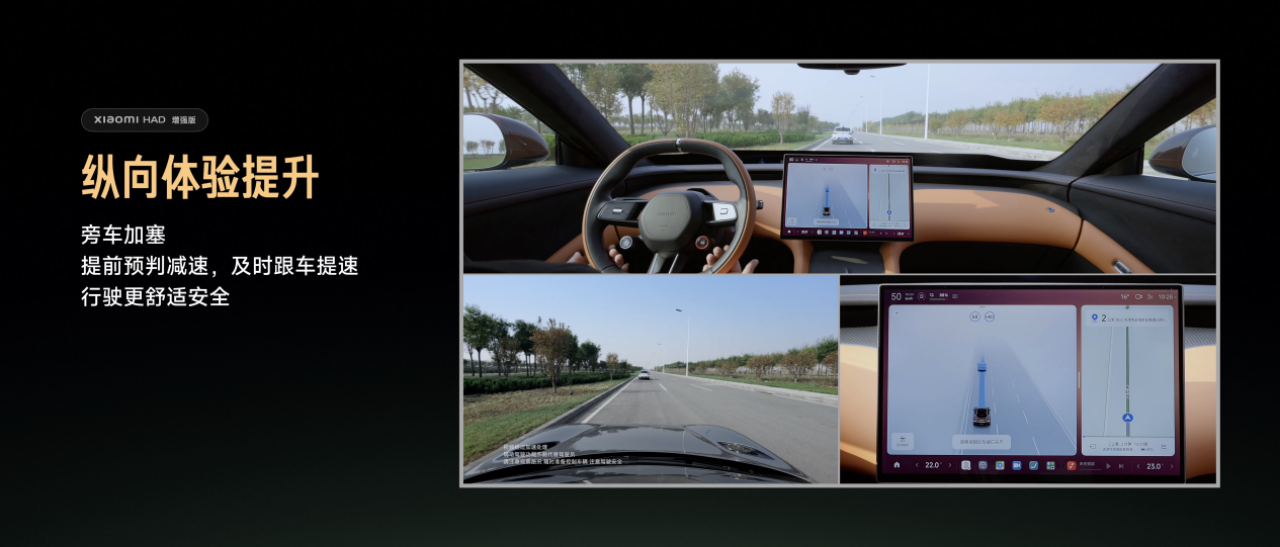
In terms of longitudinal control, the system more accurately predicts lane cutting, achieving smoother deceleration. For lateral control, by learning professional drivers’ lateral vehicle control methods, the system can precisely determine safe opportunities and smoothly execute directional control. Concerning path selection, the system shows deeper understanding capabilities in complex intersection scenarios, allowing it to plan paths in advance.
 The system’s performance across multiple scenarios is becoming more mature and reliable. From smooth lane changes on the highway to agile navigation on city roads, as well as handling intricate scenarios such as entering and exiting parking garages and residential areas, the system maintains robust performance across all situations.
The system’s performance across multiple scenarios is becoming more mature and reliable. From smooth lane changes on the highway to agile navigation on city roads, as well as handling intricate scenarios such as entering and exiting parking garages and residential areas, the system maintains robust performance across all situations.
This article is a translation by AI of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.