
Author: Tian Xi
With the approach of the Chinese New Year, the spring migration of cars is once again flooding the highways.
For the lucky NIO car owners, this is a new experience for their journey home.
Starting from New Year’s Day in 2023, NIO officially began to open the NOP+ Beta trial qualification to 10,000 users on the NT2.0 platform (including the ET7, ET5, and ES7 models), providing the latter with the strongest high-speed navigation assistance driving function in NIO’s history.
The car’s heart is also trying out the new feature and found that with NOP+’s support, users will experience a significant improvement in function experience in scenarios such as lane changing, overtaking, on and off-ramps, speed limit adjustment, and vehicle deviation.
Even if faced with a downgrade in high-precision maps, NOP+ still gives people a completely different feel. Compared to the previous NOP, NIO has developed another advanced autonomous driving system of a higher level.
In fact, at the NIO NOP+ media communication meeting prior to the Beta version release, NIO’s head of autonomous driving, Ren Shaoqing, bluntly stated that NOP+ is neither an extension of NP nor NOP’s definition under the NT1.0 platform, but rather a completely rebuilt full-stack self-developed point-to-point advanced assistance driving solution.
Simply put, the previous NOP added functions such as automatic signal light lane changing and automatic overtaking on the basis of ACC and LCC, while NOP+ is designed and developed with point-to-point autonomous driving as the goal, and the system framework and logical thinking of the two are completely different.
The mission of NOP may be to do better than ADAS, but for us, “NOP+ is the starting point of NAD,” Ren Shaoqing said firmly.
NOP+ First Experience: Saying Goodbye to Novice Drivers and Stepping into Skilled Ones
After snagging one in a million chances to try out the NIO NOP+ Beta version, I chose a route from Shenzhen to Qingyuan to experience the latest driving function of this advanced tool, covering a total distance of 180 km (round trip of 360 km), crossing day and night, and encountering scenarios such as overpasses, tunnels, on and off-ramps, and more.
After the whole process took nearly five hours, my first impression was “bold”, “flexible,” and “smooth.”
##
The so-called courage of NIO NOP+ refers to its ability to autonomously execute strategies in overtaking and changing lanes according to traffic conditions, decisively and quickly.
In the past, when NOP encountered a slow car preparing to change lanes ahead, it often waited for a few seconds to observe the cars behind and the distance between the cars in front, and only dared to switch lanes when there was sufficient space in front and behind, otherwise it would either continue to follow the slow car, or switch lanes halfway and the system automatically gave up and prompted the lane change failure, then returned to the original lane.
This over-cautious strategy often leads to a low success rate of NOP lane changing and a lower traffic efficiency. Due to its occasional abandonment of lane changing, it may even cause some safety risks.

NOP+ is different. On the high-speed road from Shenzhen to Qingyuan, as long as the system detects that the speed of the car in front is low and there is a certain space left before and after turning to the lane, NOP+ will initiate a lane change, and accelerate to overtake the slow car, and then maintain a certain speed and prepare for the next overtaking and lane change.
The result shows that the success rate of NOP+ lane changing is close to **100%**.
In fact, this also conforms to the driving style of human drivers, which can complete transportation more efficiently while ensuring safety.
The "flexibility" of NOP+ is reflected in its timing of choosing the exit ramp and adjusting speed while passing it.
Many high-speed navigation assistance driving systems on the market will gradually move from the leftmost lane to the rightmost lane when encountering the situation where the car in front needs to exit the ramp. NOP did the same thing before. The reason for doing this is obvious: to prevent missing the exit ramp.
However, the problem caused is also very significant. Due to the slow traveling speed of the far-right lane and the large number of heavy trucks there, changing lanes too early not only sacrifices the driving efficiency but also easily causes traffic accidents.
NOP+ does not mechanically set the distance at which lane change begins but judges the timing of entering the exit ramp in real-time based on the road conditions. When the traffic on the right-hand lane is not heavy, NOP+ will change lanes to the right when it is close to the exit ramp, for example, at 1.2 kilometers away from the exit ramp. If the traffic on the right is dense, it will prepare a bit further in advance.
In other words, NOP+ can handle the problem of when to enter the exit ramp very flexibly.
“`

In the process of driving on the ramp, NOP+ demonstrates its “flexibility”.
Generally speaking, the speed limit on the expressway ramp is 40 km/h. Therefore, many assisted driving companies set the ramp speed to 40 km/h. However, this seems to comply with traffic regulations, but it actually brings a bad experience to users.
Huang Xin, the person in charge of NIO’s automatic driving experience, said that the first problem is that the driving speed is too slow, especially when there are not many cars on the ramp, the speed of 40 km/h greatly reduces the traffic efficiency.
Another problem is that it is not safe to run at the speed limit when traffic on the ramp is dense.
“If a large truck behind the vehicle thinks it is driving too slowly on the ramp and tries to overtake forcibly, it will bring danger,” Huang Xin revealed that ramp passing is also one of the top three issues that NOP has been criticized by users.
NOP+ is different. It dynamically adjusts the vehicle speed according to the curvature, slope, and traffic of the ramp. The speeds I experienced on different ramps this time are different, and the average speed is up to 60 km/h, which is enough to see the flexibility and efficiency of NOP+.

Another feeling brought by NOP+ is smoothness. Following rapid start and stop in congested road sections, entering and exiting expressway ramps at high speeds, and switching between assisted driving during the day and night, all make people sitting in the car feel very smooth.
The smoother part also includes the ability of the vehicle to almost imperceptibly handle the downgrade of high-precision maps.
As we all know, due to insufficient coverage of high-precision maps in some sections of the road, NOP is easily downgraded to Pilot. NOP+ is also the same, but compared to the former, the transition between NOP+ and Pilot is more natural after the downgrade, and it will not give users a very obvious jerky feeling when switching. When it reaches the high-precision map coverage area, it can quickly and automatically connect to ensure the continuity of the user’s riding experience.

It is worth mentioning that NOP+ also gives impressive performance in terms of vehicle offset.
Whenever a large vehicle or a small car about to cross the line approaches the vehicle I ride, NOP+ will slightly deviate in the opposite direction to avoid collision with these vehicles.
Of course, NOP+ high-speed navigation assistance driving is still evolving. In my tests, there are still areas where this function needs to be improved.
One of them is **ghost braking**. During the journey from Shenzhen to Qingyuan, ET7 has experienced no fewer than 8 inexplicable ghost braking incidents. Sometimes when the vehicles in the left and right lanes are far away from the vehicle, it will also brake slightly. It is reported that many beta test car owners have raised this issue.

The second issue is also related to braking but more dangerous - **emergency braking when exiting a ramp**.
As the vehicle is about to exit the ramp and merge into the main road at a speed of approximately **50km/h**, it quickly decreases its speed and comes to an abrupt stop due to the detection of a car approaching in the right lane. I immediately took over the control, but at this time, another car happened to be approaching from behind, so I had to slow down immediately. Fortunately, both sides responded in time, otherwise an accident could have happened.
The third issue is that **the path planning is not reasonable enough in construction sections**. During use, NOP+ has prompted that "there is a construction site ahead, four kilometers away, please drive carefully" while driving in the leftmost lane. However, when it approached the construction section, NOP+ did not change lanes to avoid in advance, but continued to drive in the leftmost lane. If it were not for manual control, the vehicle would have hit the construction sign.
The fourth issue is that NOP+ still lacks a certain degree of vehicle game ability and cannot judge driving behavior in the "third lane" that is not close.```
I encountered such a scenario: the vehicle was driving in the right lane three, and a large truck was driving parallel to the right lane one. At this time, the large truck turned left to change lanes, but our vehicle "ignored" this signal light and turned right to change lanes, causing the middle lane to be contested. In order to avoid accidents, I quickly took over.
In addition, NOP+ also has the problem of being too sensitive to cone bucket performance. Even if the cone bucket is far away from the lane, separated by several lanes, or even in non-lane areas such as tunnel steps, NOP+ will still constantly beep "be careful of construction, ready to take over at any time", which has caused certain inconvenience to passengers.
## NOP+: not the "continuation" of NOP, but the "coming" of NAD
As can be seen from above, although NOP+, compared with NOP, still visibly improves the efficiency of traffic and user comfort.
In fact, NOP+ has invisible advantages compared to NOP: growth potential.
"Although NOP has come close to the performance ceiling, for NOP+, that's just the starting point." Huang Xin pointed out this very "cruel" point.
Because whether from a hardware or software perspective, NOP+ based on the NT2.0 platform completely surpasses NOP based on the NT1.0 platform, which gives the former a broader future on the intelligent driving evolution road.
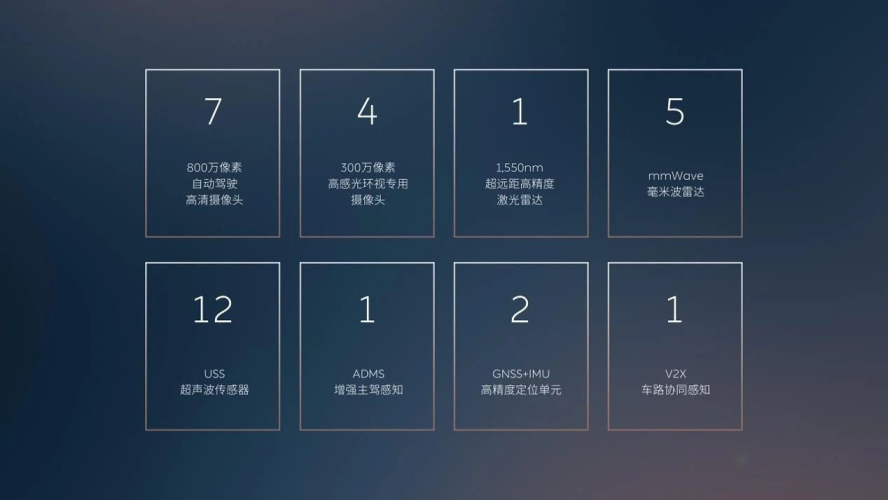
First of all, at the hardware level, the NT2.0 platform has an Aquila super sensing system composed of **33** high-performance sensors, including one 1550nm lidar, seven 8 million pixel cameras, 4 3 million omnidirectional cameras, and the Adam supercomputing platform composed of four NVIDIA Drive Orin X chips.
The ability brought by high-definition cameras and lidars to NOP+ is significant. It not only can more accurately identify the driving environment but also creates conditions for solving high-precision map usage problems with multi-sensor fusion.
“`
According to Ren Shaoqing, in the first half of 2023, NIO’s bottom-level perception of intelligent driving will switch to the BEV model, which will help mitigate the problem of low map freshness and insufficient coverage through real-time perception.
The powerful Orin chip also gives NOP+ the confidence to expand upwards.
In October 2020, NIO launched the NOP function of the NT1.0 platform based on the Mobile Eye Q4 chip with 2.5Tops computing power. After more than two years of iteration, it has been upgraded 14 times, and its capability is close to the chip bottleneck.
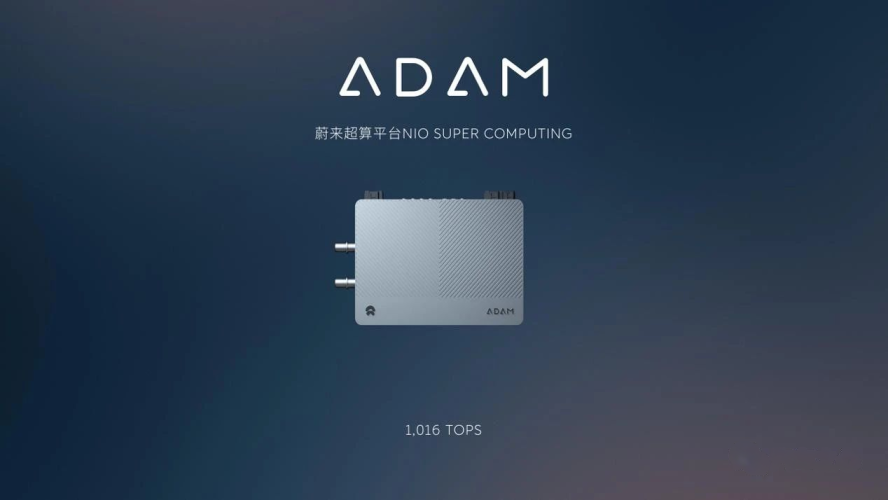
On the NT2.0 platform, the total computing power of the 4 Orin chips has suddenly increased to 1016 TOPS, laying the foundation for higher-level algorithm iteration of NOP+.
The combination of strong perception and high computing power has also formed a full-time data closed loop for NOP+, which is a necessary condition for assisted driving to move towards autonomous driving.

In the past, NIO used the Mobile Eye Q4 chip to run perception algorithms, while self-developed rules and control on the MCU. Due to the black box mode of Mobile Eye, although NOP users have driven 230 million kilometers so far (currently more than 200 thousand vehicles, with a daily mileage of more than 10 million kilometers), most of the relevant perception data are still in the “unavailable” state, which cannot help improve the NOP’s perception ability through data-driven.
On the other hand, NOP+ is self-developed by NIO’s full-stack, which does perceptual sensing and rule control on two Orin chips, and has complete control over core data and capabilities.
“““
In addition, the other two Orin chips on the NT2.0 platform are used for running shadow mode and data loop closure. Due to their high computing power, they can collect real-time full sensor data, so that when users encounter intelligent driving problems, NIO can “reproduce” the scene at any time, understand the working conditions of each sensor, and use them for subsequent cloud-based algorithm rapid iteration.
In terms of system architecture, NOP+ has stronger scalability than NOP.
Ren Shaoqing revealed that NIO’s idea in developing NOP was to extend the scene based on Pilot, for example, to divide the high-speed straight road and upper and lower ramps separately, and develop them separately according to different scenes. This leads to an inconsistent experience for users as the scene changes.
This approach makes NOP difficult to expand to urban areas, because the latter has very complex environmental conditions. If smart driving functions are developed by dividing them into single scenes, not only will the speed be slow, but the scattered functional goals will also bring poor experience to users.
NIO needs to build a smart driving system architecture that is not based on ODD, create a universal underlying capability, and this is exactly what NOP+ looks like – using a unified architecture to support scene expansion.
Ren Shaoqing said that this not only ensures the continuity of users’ experience, but also greatly accelerates the speed of NOP+ ‘s evolution in terms of breadth and depth.
From hardware and software, to system framework, NOP+ is an overthrow of the NOP route, and it is also the beginning of stepping towards NAD.
Heading towards NAD, NOP+ Starts the Corner Acceleration
When will NOP+ evolve to NAD?
Huang Xin revealed NOP+ ‘s iterative path at a media communication meeting, taking the high-speed scene as an example.
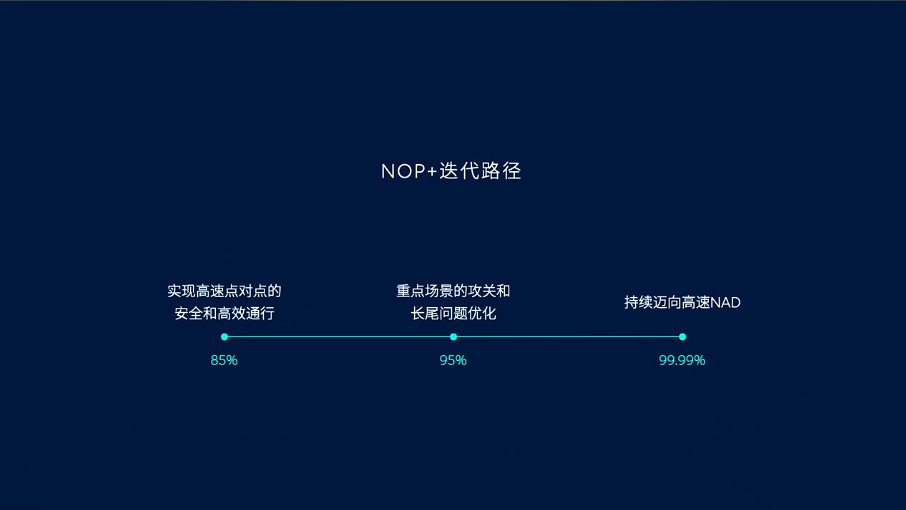
Specifically, NOP+ first needs to realize high-speed point-to-point safety and efficient access, which is equivalent to 85% of NAD’s ability level.
“`- Then, through tackling key scenes and optimizing long-tail issues, 95\% of NAD design goals are achieved;
- Finally, through continuous iterative algorithms, we move towards high-speed NAD.
Of course, the “complete version” of NAD is not limited to high-speed scenarios, but also includes battery swapping & energy supplementation, parking & low-speed, city & commuting, and so on.
For example, at the 2022 NIO DAY, NIO announced that each of its third-generation battery swapping stations will be equipped with dual Orin-X chips and two LIDARs to achieve summoning battery swapping and automatic parking.
For urban-level autonomous driving, Huang Xin stated that NIO is also conducting research and development verification. The overall idea is to develop new functions based on scenes and routes, rather than the current division of development by NOA players in different regions.
In addition, since NAD is positioned as autonomous driving and the responsibility belongs to NIO, it also requires the approval of regulatory authorities. NIO revealed that it is maintaining close communication with relevant departments.
At present, in the direction of NAD evolution, NOP+ is continuously optimizing the experience of congestion follow-up start-stop, cut-in deceleration response, two-lane changing experience, overtaking and lane changing, and “map downgrade” to be more seamless.
At the same time, NIO is actively mobilizing the “masses” to help accelerate the iteration of intelligent driving functions.
While pushing the NOP+ Beta version to 10,000 users, NIO added a one-click report interactive method in the car.When a driver encounters a problem while using NOP+, they can help the system record the recently generated autonomous driving related data by long-pressing the left or right button on the steering wheel, which is processed for compliance and then uploaded to the cloud for NIO’s algorithm researchers to analyze.
In addition, users can also give feedback on the NOP+ feature improvement suggestions directly through a conversation with NOMI. To encourage user participation in the “one-click report,” NIO provides reward mechanisms, such as points and NIO values.
The iterative effect of this “smart driving co-construction” between the car manufacturer and users is evident.
As of December 27th, 2022, the NOP+ Beta version has accumulated more than 170,000 kilometers of total driving distance since its launch on December 8th, 2022, with known issues and user feedback either resolved or being addressed.
This gives Huang Xin and Ren Shaoqing greater confidence in future experience and scenario optimization for NOP+.
Ren Shaoqing stated that NOP+ is currently transitioning from assisted driving to autonomous driving, specifically at the point where the car exits a bend and accelerates.
For NIO, the small-scale push of the NOP+ Beta version means they regain a leading position in the ADAS race. Although NIO was the first domestic auto brand to implement the Lead Navigation Assistant feature, the limited capabilities of the NT1.0 platform hindered its intelligent driving progress compared to competitors who were pulling ahead.
However, with the NT2.0 platform models being delivered, NIO is starting over with intelligent driving architecture and is catching up, surpassing, and even leading the industry in terms of progress and direction. The NOP+ Beta version is merely a “practice run” for achieving true autonomous driving (NAD), which is what NIO is ultimately seeking, and changes are quietly happening.
这是一个标题
这是一段普通的文字,加粗 和 斜体,还有链接:http://example.com。
这是一个引用。
下面是一张图片。

- 列表一
- 列表二
- 列表三
- 无序列表
- 无序列表
| 表格 | 表格 | 表格 |
|---|---|---|
| 内容 | 内容 | 内容 |
| 内容 | 内容 | 内容 |
这是一个二级标题
这是一个三级标题
这是一个四级标题
这是一个五级标题
这是一个六级标题
这是一段代码
<p>Hello World!</p>
翻译结果:
This is a title
This is a paragraph of text with bold and italic, and a link: http://example.com.
This is a quote.
Here is an image.
- List item one
- List item two
- List item three
- Unordered list
- Unordered list
| Table | Table | Table |
|---|---|---|
| Content | Content | Content |
| Content | Content | Content |
This is a second level title
This is a third level title
This is a fourth level title
This is a fifth level title
This is a sixth level title
This is a code block.
<p>Hello World!</p>
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.