Choosing the city NOA feature is more important than effort, requiring more human-like decision-making.
On August 12, we invited the Director of Intelligent Driving Product of LI Auto, @Zhelunbanchang, for a salon sharing with Garage users themed “Ideal Intelligent Driving”. The contents covered “Key Points of Assisted Driving Technology”, “Application of NPN Network in City NOA”, “Application of Dynamic BEV Model in Assisted Driving”, and “Challenges and Solutions in the End-to-End Training Process”. Here are the core highlights:
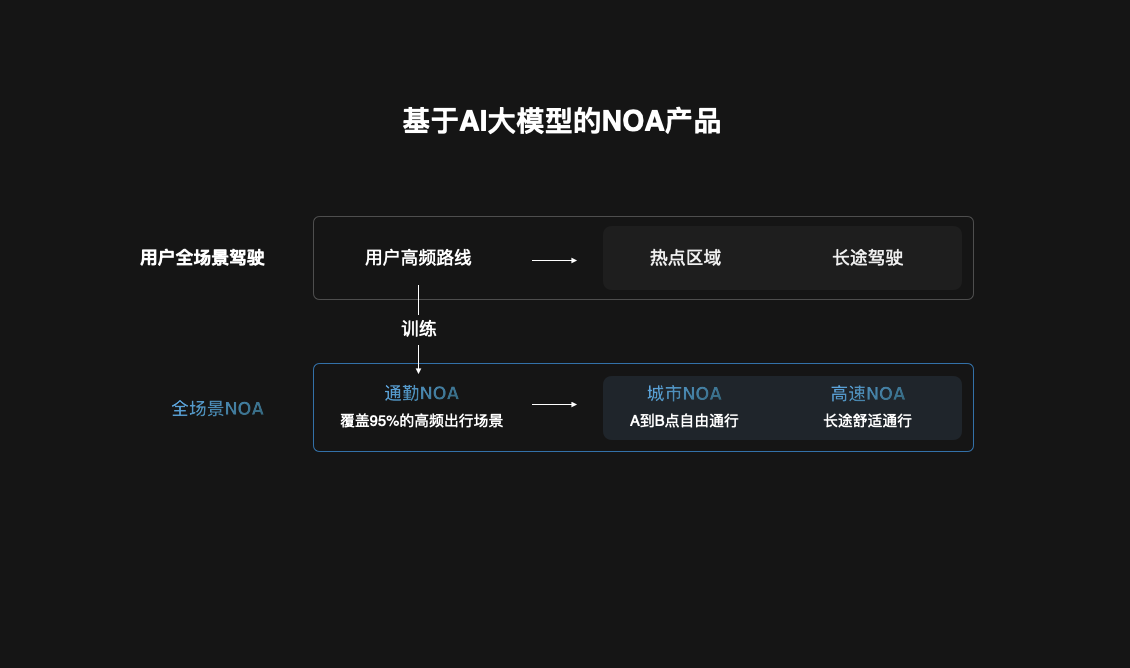
AI Large Models Resolving Sensor Independence Issue
Small models are relatively independent, requiring engineers to add many preset experiences and logic. This means that the accuracy of decision-making will be affected to some extent. Tesla took the lead in applying the Transformer to AD perception, turning small models into large ones. In the rule algorithm, there will inevitably be many situations that human experience cannot describe. We deal with map, model and rule issues with AI large models, and the expansion path of city NOA will open the highest frequent routes according to the use scenarios of users. We believe that commuting NOA is the logic of shared products, and long-distance driving will reuse the high-speed NOA record station for architecture upgrade iteration.
Four Key Technologies of Assisted Driving Function
When it comes to the key points of assisted driving technology, we believe there are four major aspects, namely, not relying on high-precision maps; needing to have the ability to recognize everything; planning and making decisions like humans; and needing to maintain a continuous evolution ability.
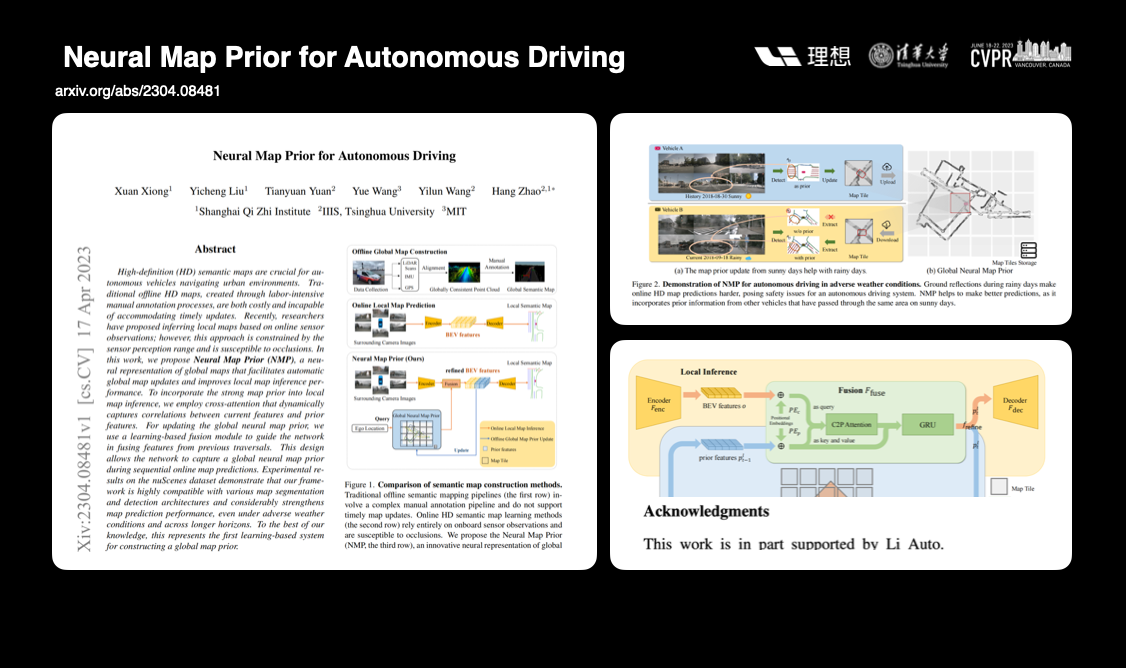
To solve the problem of unstable road generation, we used a set of NPN networks, utilizing user’s multiple historical data at an intersection, extracting intersection characteristics and putting them into the feature library. Then the vehicle will merge with the real-time BEV after driving to the feature library, thus achieving more accurate lane perception. This algorithm has collaborated with the Academy of Cross Information of Tsinghua University and was published in the CAPI paper in June.
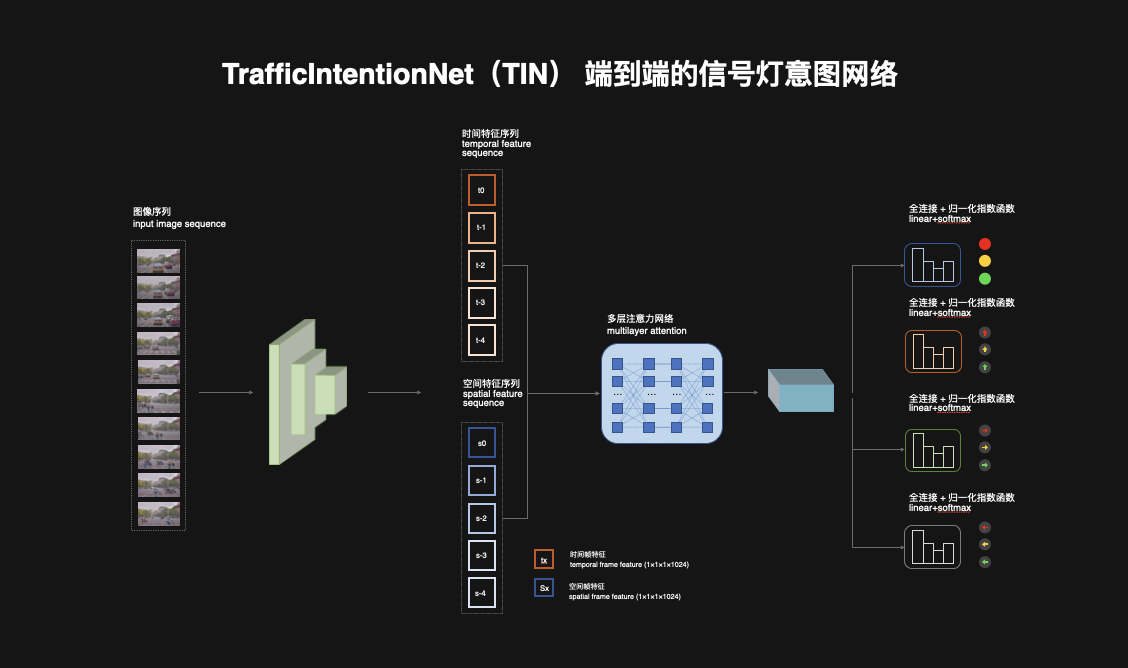
End-to-End Traffic Light Intent Model & Traffic Light Recognition and Road Matching
This model is trained through the decision-making annotation by car owners. The model can directly output decisions end-to-end, without the need for logic matching.
In the field of autonomous driving, solving mapless problems is more challenging than recognizing traffic lights. Although the red, yellow and green traffic lights can be easily recognized by vision algorithms, the intent behind them is the difficult part. Matching lights with roads is a harder problem in autonomous driving. In China, facing 9 million square kilometers and nearly 100 million kilometers of road mileage, it is very difficult for all users to update maps.

Enhancement of BEV Models and Lane Recognition Optimization
Utilizing NPN features and natural networks to enhance BEV models for improving the recognition capabilities of lane attributes, relationships, and traffic light detection; addressing the issue of graph independence, aiming to recognize all objects just as humans do; implementing dynamic BEV algorithm for vehicle processing, predicting trajectories for the next 5 seconds; adopting imitation learning algorithms to resolve planning and decision-making issues.

The Construction and Application of Autonomous Driving Technology
Our autonomous driving training platform, through automated collection, mining, annotation, and verification processes, has constructed a full-loop training process that aids continuous vehicle evolution. The technological architecture features include the utilization of NPN characteristics and natural networks to enhance BEV models for all-inclusive perception, and an imitation learning algorithm for training driver behavior habits, driving the evolution of large models with a full-cycle training platform. In terms of interactive design, we internally divide it into ‘perception restoration’ and ‘decision intention’ sections, intended to allow users to better understand where the boundaries of vehicle functionality lie and what the next action will be.
Product Definition and Discussion on Computational Power Issues
In terms of product definition, the early Pro and Max platforms have very clearly defined the city and highway, extending this to the sales end. When it comes to computational power, aside from static perception, dynamic perception, and rule control also demand a massive amount of computational support. Moreover, for the pricing of assisted driving, we believe it’s necessary to consider user groups of different vehicle types and functional implementation, but a uniform pricing strategy has not been determined yet.
The Potential and Challenges of Autonomous Driving Technology
In high-speed scenarios, the use of assisted driving functionality has made considerable strides. It is anticipated that in the next one to two years, the pre-installation penetration rate of highway NOA will become incredibly high. While discussing end-to-end autonomous driving technology, we need to take real-time performance and fault tolerance into account. Though end-to-end technology can solve most logical issues, it still requires engineering treatment for onboard application. In specific scenarios such as running a red light, traditional rules must be implemented as a fallback to ensure overall road safety. As technology advances in the future, further optimization of end-to-end systems is needed to cope with increasingly complex situations.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.