Author | Jessie
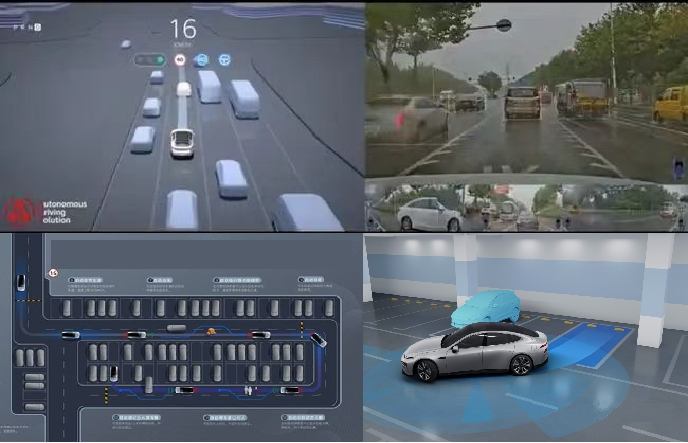
Compared with memory driving, Memory Parking Assist (MPA) can be viewed as an automatic driving function within a parking lot area that helps users cruise automatically along the memorized route and park into a parking space, or automatically cruise out of a parking space and cruise to the exit. The following figure shows the schematic diagram of memory driving and memory parking in the entire working environment.
In general, considering that memory parking is actually a low-speed automatic driving control process, it is necessary to set a certain design operating range during the memory parking process to ensure that its memory mapping and driving control are feasible. For example, from the control logic, if there is an obstacle in front during memory parking control, memory driving usually uses the brake to avoid obstacles, while memory parking uses the steering to avoid obstacles, which is a very different aspect compared to memory driving. In addition, from the entire static ODD, our memory driving usually does not need to consider too many extreme factors, as long as it is not the limitation and obstruction of the sensors, it can ensure the feasibility of memory driving control. Even scenarios such as internal roads and construction sections do not need to be considered as factors outside the ODD that need to be considered, because the system will update timely according to the recognized results. However, the driving path scheme that matches with memory driving is relatively simple.
Design Elements of Memory Parking Technology
Automatic Memory Parking is an important application of vehicle automatic driving technology. In order to achieve automatic memory parking, it is generally necessary to first generate a parking map, which generally includes parking routes and parking spaces. Based on the generated parking map, the vehicle can automatically drive along the parking route and park into the corresponding parking space, thereby realizing automatic memory parking.
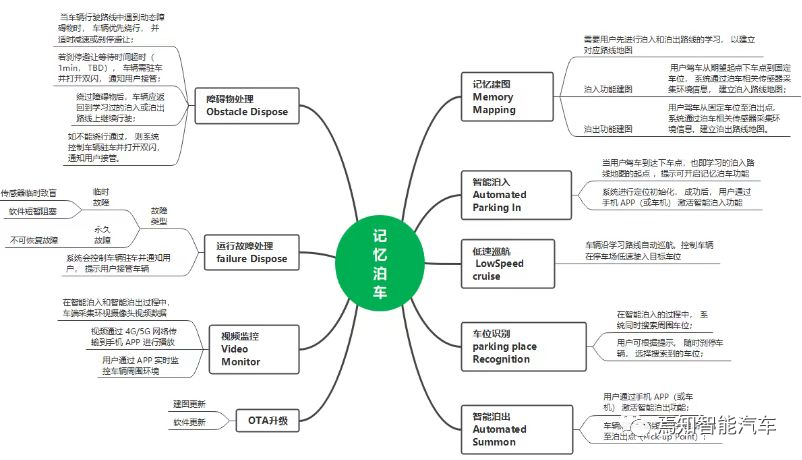
The six main sub-functions of memory parking include memory mapping, intelligent parking, parking space recognition along the way, intelligent cruising, fault handling during operation, handling of dynamic and static obstacles, and video monitoring.
The core function is mainly to use parking (omni-view camera) or some driving sensors (front camera) to draw a local map of memory parking before using intelligent parking and intelligent cruising, and to learn and establish a map of intelligent parking and intelligent cruising in advance. After the map is established, the user needs to use the established map to drive the entire intelligent parking, low-speed cruising and intelligent cruising control. During the whole process, the user does not need to manually control the vehicle, but cannot leave the seat. The entire parking process requires the user to monitor the operation status of the system, and brake or steer the vehicle if necessary to take over the vehicle. The following figure shows the schematic diagram of the functional scope covered by the entire memory parking.
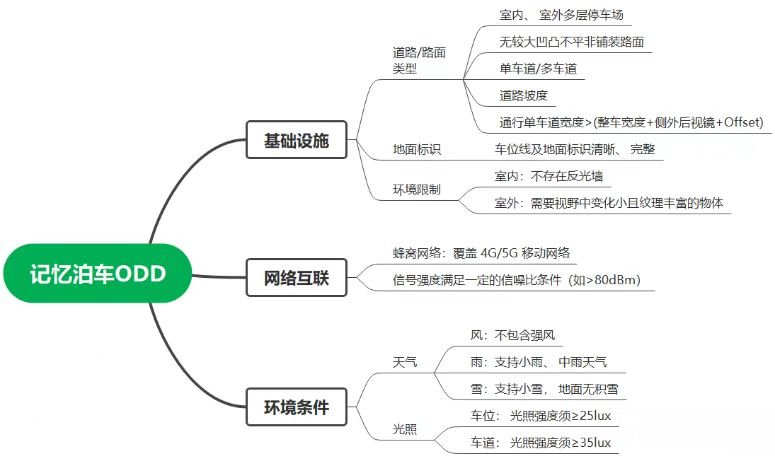
When it comes to the memory parking function, due to factors such as sensor recognition ability and system control ability, it usually needs to set a relatively strict ODD application scope. Moreover, the driver can intervene in the whole vehicle control process at any time. The following figure lists several key ODD elements.
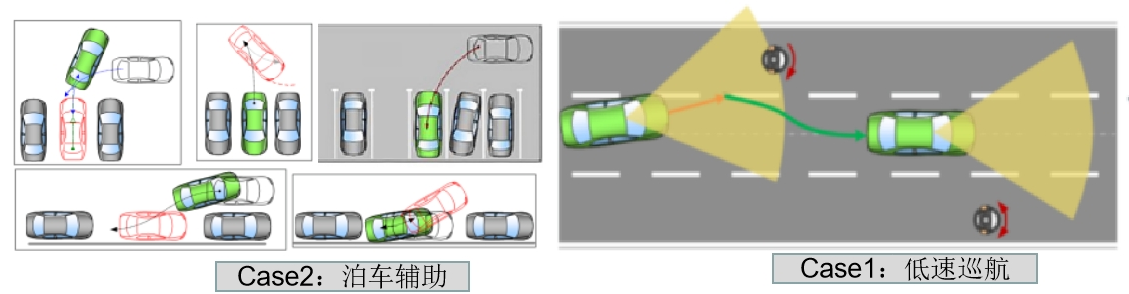
Similar to the memory parking system, the memory driving is actually a control process for intelligent assisted driving based on the pre-recorded trajectory in the host vehicle. The whole process actually includes low-speed cruising and auxiliary parking. In the intelligent parking control process, users are usually allowed to get off in a certain period of time and use the mobile phone to remotely control the vehicle to automatically park in the parking space. This process requires calling the corresponding control process from the remote parking module.
The system architecture data flow diagram of the entire memory parking is shown below:
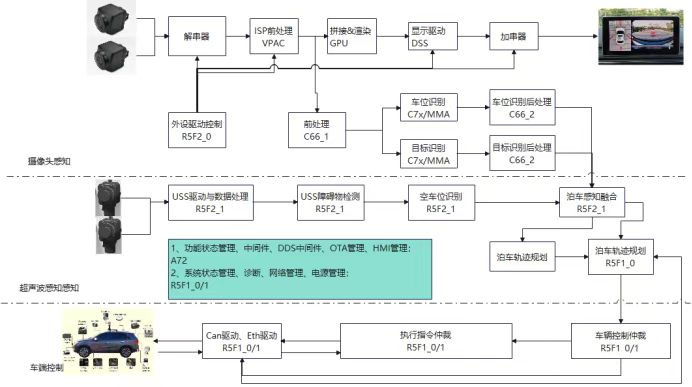
Taking the typical parking algorithm processing chip as an example, the entire memory parking processing process is divided into two main lines: the data input from the panoramic camera goes through the ISP processing on the VPAC module on TDA4, which can be divided into two steps of routing. One of them is the real-time processing of the neural network completed by C7x/MMA, and the other is the front-end processing and back-end processing respectively completed by two DSP cores in the C66 module.
Principles of parking mapping and repositioning
During the data collection stage, comprehensive and layered data collection is conducted on the entire parking lot, and the front-view and panoramic-view videos required for mapping are uploaded to the data management center. Through the parking quality inspection and annotation system, corresponding timestamp information, positioning information, and sensor calibration information are generated, and two different perception model information are generated in combination with the previously preset map information PreMap (which can be generated by other vehicle models and downloaded by this vehicle through the cloud). The generated camera model data information and ultrasonic recognition model information (parking trajectory information and parking space recognition information, respectively) are then subjected to data post-processing (time synchronization of all sensors, object association for different objects, parking trajectory fusion correction, parking space recognition correction, etc.). Finally, the generated data is input into the map model for effective data training.
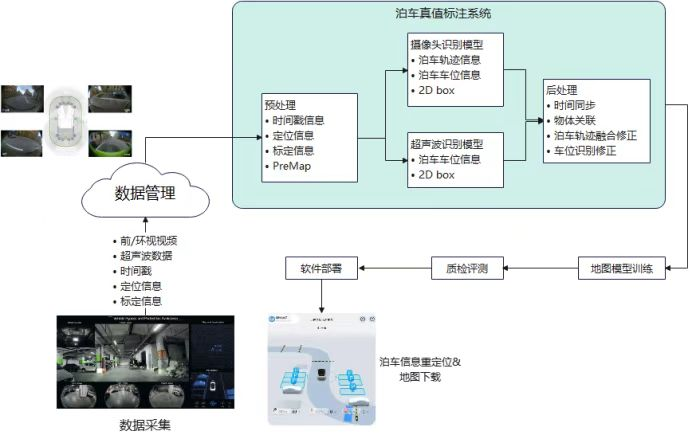
During the parking mapping process, it is usually necessary to preset the confidence level of the established map through a preset confidence algorithm on the cloud. In the parking activation and trial use stage, the parking map that meets the preset confidence can be directly sent to the vehicle end, so that the vehicle end can automatically memorize parking based on the parking map. It should be noted that the algorithm for presetting the parking map confidence level is actually set through manual quality inspection (also called quality inspection), and the degree of confidence is effectively numbered. This type of quality inspection process is similar to the ground truth labeling in the BEV mapping process. If there are many parking maps waiting to be inspected, manually inspecting each parking map will generate a large amount of labor cost and affect the inspection efficiency. Therefore, automated inspection methods are also important to consider. As shown in the figure above, it represents the entire process from memory parking mapping to image inspection.
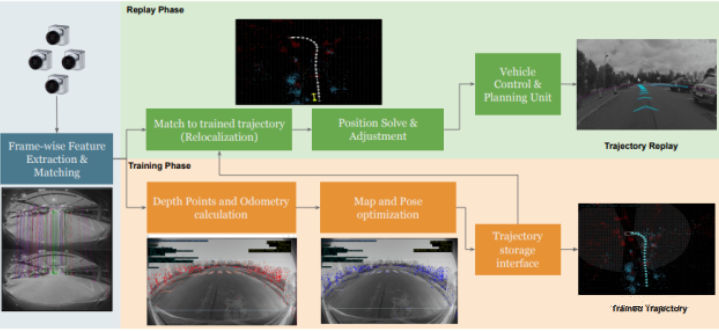
The figure below shows a typical schematic diagram of parking mapping and repositioning. The input end includes four panoramic perceptual cameras. During the mapping stage, the distance estimation in the deep point cloud between multiple panoramic cameras is considered, and the corresponding mapping and position are optimized. Its generated trajectory is stored and its corresponding interface is exposed for other modules to call. In addition, the four panoramic videos will be used as the feature extraction input for the entire mapping, and the generated map data can be downloaded through the cloud interface, matched with the trained mapping trajectory, and undergo effective repositioning, and the current position of the entire vehicle body posture can be queried and adjusted. Finally, the vehicle trajectory planning and control unit will perform overall vehicle control response.“`markdown
Note that the map created here is neither a high-precision map nor a navigation map. Of course, the distance for parking mapping is much smaller than that for driving, because this kind of path still requires a large amount of information to be included, and different parking spaces and parking in and out processes need to be synchronously established with different maps. The map information needs to include the following information in particular:
①Lane marking information: vehicle running trajectory information (x, y, z coordinates), parking space information (x, y, z coordinates of the four corners), where the z-axis information here mainly refers to interlayer information. In addition, there are some parking lot road signs: such as intersections, pillars, speed bumps, ramps;
②Vehicle positioning feature information: GPS information of the starting point and ending point of the map;
** ③The confirmation of parking spaces and the implantation of newly added parking spaces**: that is, the target parking space and the corresponding parking space that may be detected when driving to the middle of the target parking space.
Parking map storage and management
Similar to the memory driving storage method, the memory parking storage unit is also located in the intelligent driving domain controller, and can be stored in the designated EMMC. The entire map storage process is automatically triggered after the user completes the mapping. Maps can be synchronized and stored in the cloud. If considering car interconnection, this map can also serve as the parking map for other networked vehicles. When the network signal is good and the own vehicle is located in the corresponding parking lot, the background download program can be started to control the vehicle to download and produce the map from the cloud.
As mentioned earlier, the maximum number of maps need to be limited during the map building process. When the maximum value is exceeded, map coverage needs to be performed forward.
The map building process cannot guarantee a 100% success rate. When the map building fails, the map route cannot be used for parking control. At this time, the log recording function needs to be started in the background to record the reasons for the map building failure in detail. At the same time, the system foreground needs to use HMI to remind the user of the map building failure.
Memory parking workflow principle
“`To achieve the functions of intelligent parking and intelligent unparking, users need to drive their vehicles into the parking lot for the learning of the corresponding map routes for intelligent parking and intelligent unparking. The background system of the intelligent driving vehicle stores the corresponding memory map routes.
During the entire mapping process, corresponding mapping requirements need to be proposed for the parking route, unparking route, and the maximum allowable reversing distance. For example, when building a parking route during the mapping process, it is necessary to consider that the entire parking lot supports entry from different parking entrances, and different parking routes can be established on the map. The unparking process needs to support mapping of different parking spaces in the same parking lot. This process needs to consider establishing a parking route map for different parking spaces as the starting point in the same parking lot.
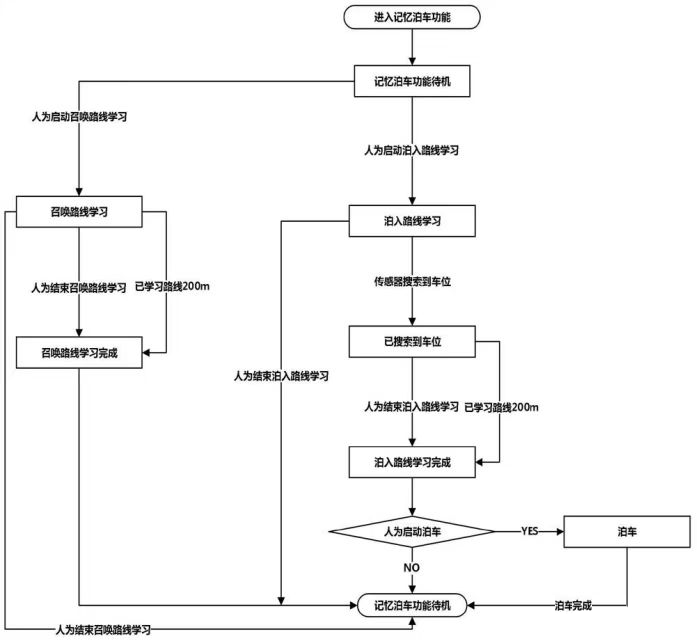
The entire parking process is described as follows:
Step 1: The intelligent vehicle enters the parking lot, and the parking type is activated through the vehicle system (button/voice) as parking (parking in).
Step 2: The vehicle system needs to display the memory parking function interface, and the user needs to manually drive the vehicle to the target parking space according to the prompt.
Step 3: After reaching near the parking space, the user can directly dial in the parking space and shift to P gear. Alternatively, the driver can click the confirmation to recognize the parking space on the vehicle system.
Step 4: After controlling the vehicle to park, the system automatically verifies the map and saves the corresponding map data.
Step 5: After a successful mapping, if the driver continues to choose parking, enter step 7 to start the unparking mapping process. Otherwise, the mapping ends.
Step 6: When the driver inputs the unparking request, the driver can manually drive the car to the unparking point. At this time, when the system confirms that the driver’s unparking process has ended, the system generates and verifies the map data in the background.
It is important to note that intelligent parking and unparking need to establish different maps separately. The parking and unparking maps are mutually related by one property. The mapping process needs to meet the requirements of mapping distance, vehicle speed, and mapping algorithm matching. Usually, the one-way (parking or unparking) mapping distance does not exceed a certain value (such as 2km). During the mapping process, the vehicle system can display the mapping distance in real-time and remind the driver timely. In addition, to consider the effectiveness and performance of mapping, there are certain requirements for driving speed (generally less than 20kph). If the driver overspeeds for a certain time threshold in the long term, the driver will be prompted to exit the overspeeding mode. Moreover, different parking space information can trigger the establishment of different maps. The number of such maps is actually within certain limits. For example, a maximum of 10 maps can be stored to identify 10 parking space information.# 汽车品牌列表
以下是一些流行的汽车品牌:
- 别克
- 雪佛兰
- 雷克萨斯
- 宝马
我们认为 <a href="https://www.google.com/search?q=top+car+brands&oq=top+car+brands&aqs=chrome.0.35i39l2j0l4j46j69i60.2577j0j7&sourceid=chrome&ie=UTF-8">这个链接</a> 解释了更多有关汽车品牌的信息。
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.