
Author: Zhu Yulong
Yesterday’s JET concept car at the JET conference attracted a lot of attention, and what was interesting was the JET EE architecture – a system that revolves around intelligent driving, intelligent cabin, whole-vehicle control, and powertrain. The system links all the vehicle sensors and high-performance computing platforms through a high-bandwidth gigabit Ethernet ring.
Nowadays, new players have begun playing with cross-domain integration and high-performance computing platforms.

Currently Displayed Content
Currently, new powers, from NIO, IDEAL, and Xpeng, all revolve around two basic SoC chip platforms from NVIDIA and Qualcomm, and JET is no exception.
The automatic assisted driving system uses NVIDIA’s dual Orin X chips, and the cabin adopts the Qualcomm 8295 chip. The Cabin Domain Controller (CDC) uses Qualcomm’s chip and was announced last year when JET, Baidu, and Qualcomm entered into a collaboration agreement.
For the intelligent cabin, the newest features mainly include offline speech, 3D human-machine maps, in-car and external interaction, as well as visual perception (personnel monitoring), voiceprint recognition, lip-reading capture, etc., with more emphasis on the interaction level. Of course, a large part of this 8295 needs to drive the screen that runs through it, and with the addition of algorithms that recognize personnel, more emphasis is placed on a system interface.
I have a question here. Is the so-called voice recognition function outside the vehicle just setting up multiple sound collection sensors outside the body, and then processing them through a unified collection to the 8295, similar to making a speaker, and then configuring external lights for interaction (the official explanation is “person-vehicle-environment” natural communication)?


Currently, almost all new players in the automotive industry have adopted NVIDIA’s Orin chips and use a “vision + lidar” automatic assisted driving solution. Based on functional safety and training needs, the two independent Orin systems are mutually backup and redundant. It’s not surprising that the smart driving domain controller (ACU) is such.To consider maintenance of the LiDAR, a hood-lifting dual LiDAR design is used, which has unique features as explained previously. According to the deployment plan by Liangdao Intelligence, the current Jidu system has caused considerable controversy. Its functionalities are similar to those of the ARCFOX Fang Left-Mid-Right system, but with less stringent requirements for anti-fouling. The front hood is exposed to direct sunlight, resulting in high temperatures that pose a challenge in terms of heat dissipation, waterproofing, and collision repair costs. The traditional hood is a movable component that poses risks due to usage and calibration, requiring strict real-time dynamic calibration to ensure the reliability of the LiDAR hardware. Several factors affecting the size of the blind zone of the LiDAR are constituted when installed on the hood of the vehicle: The primary vertical FOV includes the height of the LiDAR installation (Height1), the downward tilt angle that the LiDAR can adjust, and the constraints induced by the hood obstruction.


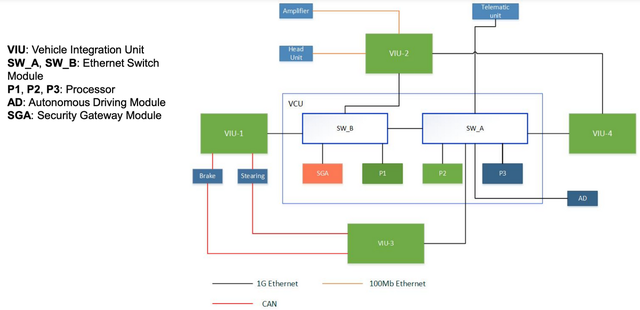
Due to collaboration with Volvo’s platform, it is highly probable that the power system and vehicle body system are derived from the Geely-Volvo system. This is not extensively promoted and can be roughly inferred by referencing the figure below (with separation between cabin and intelligent driving).
Gigabit Ethernet and TSN
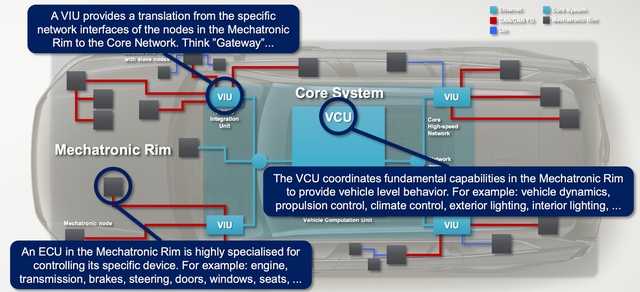
In this system, Volvo somewhat early on established the system to a certain extent, and Volvo will later make the entire intelligent driving, cabin, and overall vehicle control a big VCU, then connect with VIU.
-
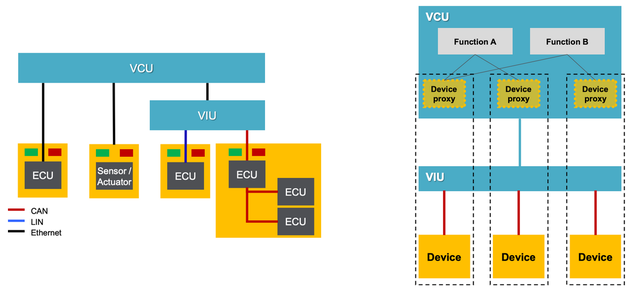
VIU serves as a regional gateway, with the nodes below being electromechanical integrated Rim nodes.
-
The electromechanical integrated Rim nodes are becoming increasingly specialized in intelligent control and even featuring single-chip solutions that are similar to a set of LIN solutions with control previously released by the driving manufacturers.
-
The VCU is the top-level logic unit that Jidu wants to implement, controlling the underlying network through SOA and providing vehicle-level control behaviors (vehicle power control, air conditioning control, external lighting, internal lighting).We can understand why Jidu can quickly cut into the centralized architecture. It is indeed based on the underlying network of the entire vehicle that has already been working on a common platform with SOA through Ethernet. Then you only need to focus on the two main software units of automatic assisted driving and cockpit.
Conclusion: Personally, I think this Jidu case has made most of the whole vehicle enterprises run into SOA and centralized architecture in 2023, with a large number of gateways imported in the lower layer. The mode of doing software when you want to do software and spreading the cost through the overall architecture is indeed worth trying. In the end, people are still competing for the overall software experience. This time point officially starts at the end of 2022 – 2023.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.