
On December 30th, at the online Intelligent Driving Strategy Upgrade Conference hosted by Great Wall Motors, Zhen Longbao from Great Wall Motors shared the following for everyone to interpret the technology of Great Wall Motors’ Coffee Intelligence Driving. Earlier, Mr. Kai introduced Coffee Intelligence Driving to everyone, aiming to be the leader of autonomous driving in the intelligent era in China. It mainly involves three dimensions: safety, scenarios and user experience. Below, I will interpret them one by one.
When it comes to autonomous driving, the first core issue that comes to mind is: is it safe? It can be said that “safety” is always the core essence of the intelligent driving era. For autonomous driving cars, safety issues must not be ignored. All technology development that is not based on safety is meaningless.
We believe that autonomous driving safety is a brand new definition of car safety. I remember a few years ago, when I visited a senior expert in the industry at a university, and talked about autonomous driving safety, I told him that our head of safety comes from the aviation industry. The old professor was very surprised and asked me: “The safety measures in aviation are redundant. Can redundancy design be acceptable in the automotive field?” My answer was that advanced autonomous driving should be redundant, just like in the aviation industry, in order to ensure true safety.
Until today, we still believe that safety redundancy is a prerequisite for achieving advanced autonomous driving. Great Wall Motors Coffee Intelligence Driving has built six redundant technology systems in terms of safety, including perception redundancy, control redundancy, architecture redundancy, power redundancy, brake redundancy, and steering redundancy. It achieves all-round protection for drivers and passengers, and at the same time achieves industry-leading failure operation capability.In terms of perception, we have established a comprehensive sensor configuration for the whole vehicle with 360-degree double coverage, including 8R+8V+3L+12U+1HDMap+V2X. At the same time, we have formed the strongest triple redundancy in the front part, consisting of a multi-source heterogeneous sensor architecture composed of laser radar, millimeter wave radar, and cameras, which can effectively ensure the multiple redundant perception of targets, lane lines, and road boundaries.
As we all know, the perception of millimeter wave radar towards distant static targets has a natural disadvantage, and the use of laser radar can effectively make up for this deficiency. At the same time, laser radar can also effectively compensate for the problem of perception fluctuation and limitation of cameras in special scenes such as night and changing light conditions. Therefore, our solution, compared to fusion sensors consisting only of millimeter wave radar and cameras, increases safety by more than 1 times. So, we always believe that only a multi-source heterogeneous sensor architecture including laser radar can be considered a truly redundant solution.
Here, I want to emphasize that the laser radar we configured for the advanced autonomous driving system is a custom laser radar jointly developed with IBEO company from Germany, which is the world’s first vehicle-level high-performance and all-solid-state laser radar that can be truly mass-produced. This solid-state laser radar uses the FLASH technology and principle of fast flashing to emit up to 256,000 points at an area in just 1 second, which are then received by a high-sensitivity receiver to complete the construction of the surrounding environment image.

The angular resolution of this solid-state laser radar reaches an astonishing 0.05 degrees * 0.07 degrees, which is the highest level in the world. Its performance is 5 times better than that of mechanical laser radar used by ordinary unmanned vehicles currently available in the market. In other words, by applying this pure solid-state laser radar, our autonomous driving system can easily detect tires and snow cones scattered on the ground 130 meters ahead, which wins at least 4 seconds for decision-making and planning.
It is these precious 4 seconds that enable the vehicle to easily change lanes and avoid obstacles. In addition, this laser radar has a distance resolution of 0.05 meters, which can effectively compensate for the large longitudinal distance error of cameras. Also, except for tiny targets, this laser radar can perceive objects such as vehicles, pedestrians, and lane lines. As a result, our advanced autonomous driving system can perform more accurate longitudinal and lateral control, bringing a more comfortable experience to drivers and passengers.In terms of controllers, we have designed a series of different levels of controllers for the autonomous driving system. In high-level autonomous driving systems, we adopt a dual-controller scheme, which can achieve continuous monitoring. The two sets of controllers run all the time, supervise each other, and serve as backups for each other. When one controller fails, the other controller can take over the vehicle without interruption, with a shortest takeover time of only 20 milliseconds, thus achieving the safety redundancy of the system.
Here, I would like to emphasize that we adopt Qualcomm’s chip solution to build the domain controller for the high-level autonomous driving system. This controller is built based on the Qualcomm Ride 8540+9000 chip. The Snapdragon Ride chip adopts the 7nm production process and a combination of different Snapdragon automotive SoC plus accelerator. The SoC features a scalable and modular high-performance heterogeneous multi-core CPU, efficient AI and computer vision engines, and a leading GPU in the industry, which can achieve a calculation performance of 360 Tops (360 trillion times per second). It provides end-users with supercomputing power and effectively supports the large computing power required for AI vision while consuming only 65 W. Its efficiency of 5.5 Tops/W leads the world. Meanwhile, this computing platform can also provide an upgrade plan, with two standard large computing power platforms onboard, which can attain a computing power of 700+ Tops.
To cooperate with our dual-controller scheme for high-level autonomous driving, we specially designed a redundant scheme with dual communication and dual power supply. Let’s first take a look at the dual communication architecture. We have designed three independent physical communication links, which do not affect each other and support each other at the same time. At the same time, real-time verification of different signals can be carried out during the normal operation of the system, thereby improving the security level of information transmission to the highest ASILD level. In addition, when a single link has signal interruption, the system can achieve seamless and secure connection of information, ensuring the safety and controllability of the vehicle at all times. At the same time, based on this link, 10 software logical control channels can be realized to ensure the operability of the autonomous driving system in failure mode. Based on this link design, real-time information sharing of more than 30 sensors can also be realized, maximizing the safety and comfort of the system.
The dual-power redundancy scheme adopts a dual power supply and dual-loop design. High-security isolators are used between the two power grids to isolate power grid faults within 500 microseconds, ensuring that there is always an intact circuit available to support the system’s safe degradation actions. At the same time, after the main power grid fails, the backup power grid can ensure 5 minutes of system failure running time, far exceeding the legal requirement of 10 seconds.In terms of the execution system of autonomous driving, we also have redundancy capability. We adopted two sets of independent electronic brake control units, ESP and IBOOSTER. The two systems operate independently and share information in full-time operation mode, with full-scenario failure operation coverage. At the same time, this redundant system can still maintain braking control stability and support full coverage of capabilities by providing a maximum braking force of -10 m/s2 even after a single hardware failure. In addition, we have achieved full-speed range coverage, with speeds ranging from 0 to 120 km/h.
In terms of the steering system, we adopt the Gen3 intelligent steering product provided by Hive Steering. It features dual-winding motors, dual motor position sensors, dual CPUs, and dual controllers. Even with any single hardware circuit failure, it can still achieve 50% power output. Therefore, whether driving forward, turning, reversing, or parking, all scenarios are covered by redundant steering capabilities.
The third-generation intelligent steering system from Hive Steering is the world’s first fully redundant intelligent steering system. Equipping this intelligent steering system has put us ahead of our competitors in autonomous driving redundancy control platforms for at least one year.
We believe that the safety of autonomous driving is the safety of the entire system. Great Wall Motors has created the world’s first truly fully redundant production platform for autonomous driving, achieving a fully redundant safety design for the entire system. Some basic accessories, such as wheel speed sensors, IMUs, are all redundant. We even made the dangerous warning lights redundant, which is to take safety to the extreme.
Just now, we introduced the configuration of our advanced autonomous driving system. We have a multi-source heterogeneous sensor configuration, with ultra-high-precision lidars, millimeter-wave radars, and cameras to form a redundant perception configuration. We have a redundant safety configuration with double controllers, double communication, and double power supply. We have fully redundant brake and steering systems. So how do they perform when combined? Let’s take a look at the big screen.
As shown in the video, Coffee Intelligence Driving has achieved full-scenario coverage of high-speed and urban expressways, and has also overcome many scenarios that even top foreign autonomous driving players find difficult to conquer, such as driving in a convoy with large vehicles, avoiding cones, driving within speed limits, passing through toll stations, and other cruising scenarios. Regarding lane changing behavior, we have completed the development of various lane-changing scenarios, such as road shape lane-changing, obstacle avoidance lane-changing, multi-car lane-changing, and city autonomous lane-changing.
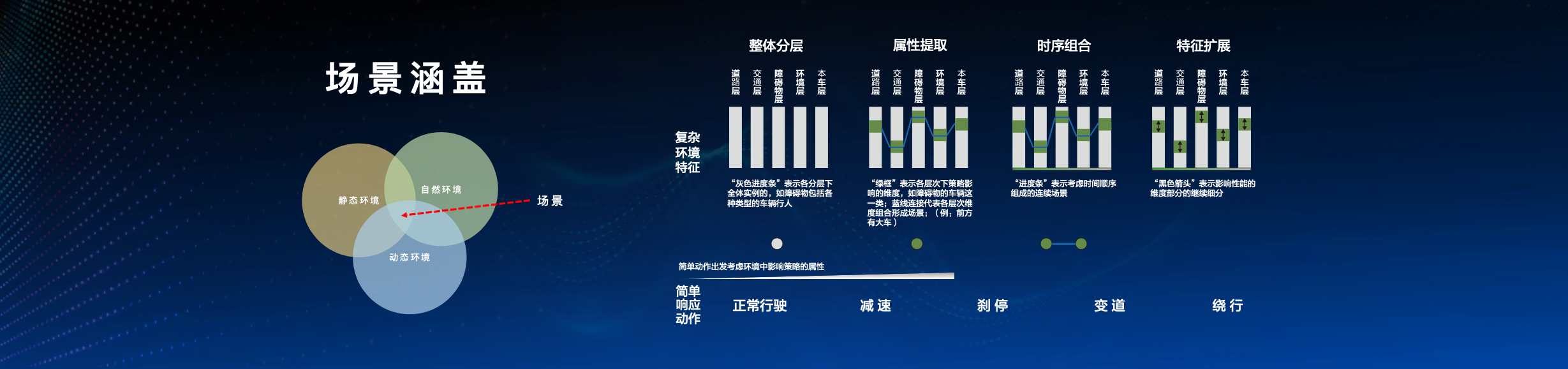 We construct the 5-layer scene system of Coffee Intelligence Driving by using the organic combination of dynamic, natural and static environments. Each layer consists of countless sub-dimensional units, and each layer presents a slice of a specific scene by combining a unit from each layer. Multiple continuous slices make up a continuous scene. We learn more and more new segmented scenes by expanding and adding sub-dimensional units in each layer and defining the characteristics of each unit more finely.
We construct the 5-layer scene system of Coffee Intelligence Driving by using the organic combination of dynamic, natural and static environments. Each layer consists of countless sub-dimensional units, and each layer presents a slice of a specific scene by combining a unit from each layer. Multiple continuous slices make up a continuous scene. We learn more and more new segmented scenes by expanding and adding sub-dimensional units in each layer and defining the characteristics of each unit more finely.
Finally, we converge all scenes by a simple responsive action, forming our unique autonomous driving strategy for coping with different scenes, ensuring 100% accuracy of decision-making.
Coffee Intelligence Driving attaches great importance to user experience and has pioneered the only quantitative method in the industry for evaluating user experience, which is user use cost. By decomposing user use cost in a comprehensive way, we divide it into 5 sub-dimensional units: operating cost, awareness cost, safety cost, time cost and money cost. We conducted extensive research and detailed evaluation on users and top players in the industry based on these 5 sub-dimensional units.
At present, Coffee Intelligence Driving can effectively reduce user use cost by more than 50%, leading the industry. We have created the AIFEED function, which can actively learn, understand and adapt to users’ driving habits and car usage scenarios through AI algorithms. We can perceive users’ pain points and recommend personalized autonomous driving functions to reduce user use costs and maximize satisfaction of user needs.
AIFEED can also optimize vehicle driving strategies that are closer to users’ daily usage habits, and ultimately achieve customized autonomous driving for every car owner. What will the integrated autonomous driving look like? Let’s watch it together on the big screen.
Through the big screen, we can see the rapid evolution of the autonomous driving system and the corresponding various driving styles. To achieve this, we need to rely on complete data and AI capabilities. Currently, we have established a complete AI capability from perception to cognition. The cornerstone of the development of unmanned driving is the amount of data and the ability to process data, and our core competitiveness lies in the ultra-low cost and ultra-fast speed of AI iterations.
AI iteration cost = data collection cost + data processing cost + AI training cost
AI iteration speed = data collection speed * data processing speed * AI training speed
As one of the giant players with a vehicle scale of millions, Great Wall will have a great advantage in the long-running competition of data cost and iteration speed.
 According to the safety assurance, user scenarios, and user experience, the Great Wall Motors Coffee Intelligence Driving can provide the best experience and become the most competitive solution for intelligent driving. As the intelligent era is coming comprehensively, Great Wall Motors is striving to embrace the enormous changes and our goal, as General Manager Zhang Kai said, is to become the leader of automatic driving in the intelligent era!
According to the safety assurance, user scenarios, and user experience, the Great Wall Motors Coffee Intelligence Driving can provide the best experience and become the most competitive solution for intelligent driving. As the intelligent era is coming comprehensively, Great Wall Motors is striving to embrace the enormous changes and our goal, as General Manager Zhang Kai said, is to become the leader of automatic driving in the intelligent era!
In the future, we will work with all partners to move forward towards this goal with a hundred times of efforts. Please stay tuned! Thank you, everyone!
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.