
At the recent launch event of the 11th generation Mercedes-Benz S-Class, the automatic driving assistance function was taken to a whole new level. This “level” not only refers to the proportion of time that automatic driving was discussed at the event, but also to the capabilities of automatic driving.
The Chief Operating Officer of Mercedes-Benz introduced in the event video, “The all-new Mercedes-Benz S-Class sedan is equipped with L3 automatic driving function, and we plan to officially launch the DRIVE PILOT automatic driving system in Germany in the second half of 2021.”
This makes Mercedes-Benz the second German car company to claim L3 level automatic driving, following Audi A8.
According to the documents publicly released by BMW, the upcoming all-electric SUV iNEXT, which will be launched in 2021, will also achieve L3 level automatic driving.
In other words, the German big three are all stepping into the era of L3 level automatic driving, but for some traditional car manufacturers and most of the new Chinese car makers, L3 is still a false proposition.
Unfortunately, the L3 automatic driving configuration of A8 has been cut, Mercedes-Benz’s L3 has not yet been officially released, and the iNEXT of BMW has not been launched yet. As a result, we cannot yet experience a L3 or higher level automatic driving vehicle. All we can do for now is to take a peek at the hardware specifications and try to find the similarities and differences among various car companies in their approach to achieving automatic driving.
As flagship models of their respective brands, the Mercedes-Benz S, Audi A8, and BMW iNEXT often go to great lengths to incorporate all of their cutting-edge research and development achievements. These models provide insight into the prediction of automotive trends for the next 6-8 years.
One thing that stands out in these vehicles is their use of perception cameras, laser radar, high-precision maps, and high-precision positioning. Although the number of perception cameras varies, the use of laser radar and high-precision mapping + positioning is a common choice among car makers.Now let’s add Tesla and new car makers to this chart.
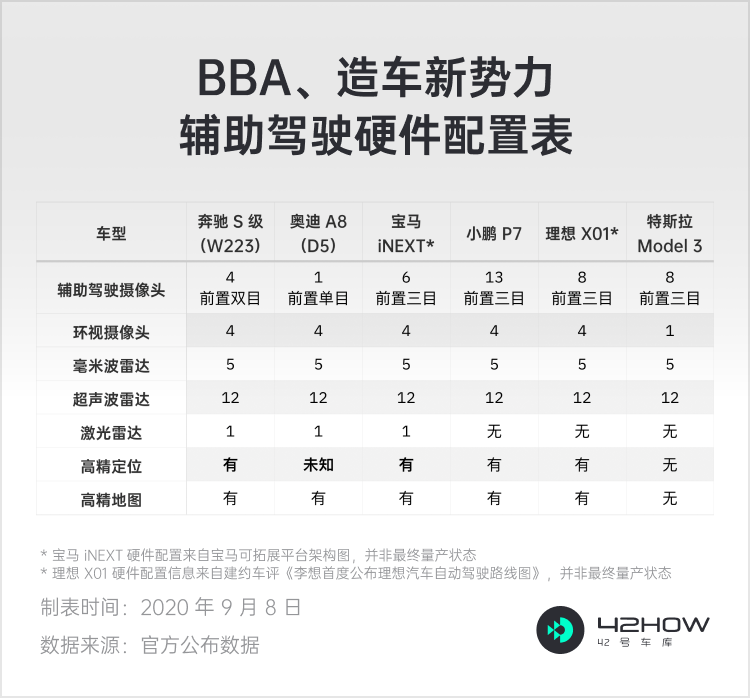
We can clearly see that BBA has all adopted lidar on the single-vehicle perception level, while new car makers led by Tesla have chosen vision-based perception hardware.
But except for Tesla, high-precision maps + high-precision positioning have become everyone’s common choice.
This is like several candidates solving the same math problem. While their ideas may differ, they all use the same set of formulas.
So, is high-precision maps + high-precision positioning necessary?
Necessity of High-Precision Maps
I happened to have experience with the earliest mass-produced autonomous driving system that uses high-precision maps + high-precision positioning―Super Cruise―in my recent deep-driving test drive.
As early as 2017, Cadillac launched the Super Cruise advanced driving assistance system based on high-precision positioning and high-precision maps. Judging from the trend of the mainstream automakers’ choices now, General Motors’ choice is highly forward-looking in terms of route selection.
Therefore, through the practical experience of CT6, we can also see the necessity of “high-precision maps + high-precision positioning” for assisted driving.
Adverse weather conditions
Heavy rain is currently one of the most common adverse road conditions that we encounter. Due to the interference of rainwater, not only is our vision severely blocked, but the reflection of light on the wet surface and the tire marks left by preceding vehicles also interfere with our judgment of the lane markings.

Therefore, when encountering heavy rain road conditions, we instinctively slow down and allow more observation time for our eyes and more reaction time for our brains.
As most current models of assisted driving rely entirely on cameras to recognize lane markings, vehicles face the same problem as humans in such situations. The visual recognition ability and algorithm analysis ability are significantly increased under these circumstances.

Insufficient recognition ability translates into two possible outcomes: either the assisted driving quits, or the vehicle drifts away from the lane markings.
High-precision maps and high-precision positioning can accurately locate the vehicle and lane markings to the sub-meter level. Since all road data is known information that is not affected by external environments, high-precision maps can help alleviate the shortcomings of the visual system.
Therefore, even if the visual recognition is unstable, high-precision maps can be used as a cross-validation to improve the stability of the vehicle’s driving.In a 2100 km trip, there were many heavy rains, but the stability of Super Cruise operation far exceeded that of most Level 2 assisted driving systems.
Chaotic Lane Sections
Chaotic lane sections are also very common in real-life scenarios, and it’s easy to imagine the problems that can arise with visually dependent vehicles.
Yes, exiting or drawing dragons.
High Curvature Turns
Keen readers will have already noticed that some vehicle models have one front-facing camera, while others have three. What’s the difference?
Detection range and detection angle.
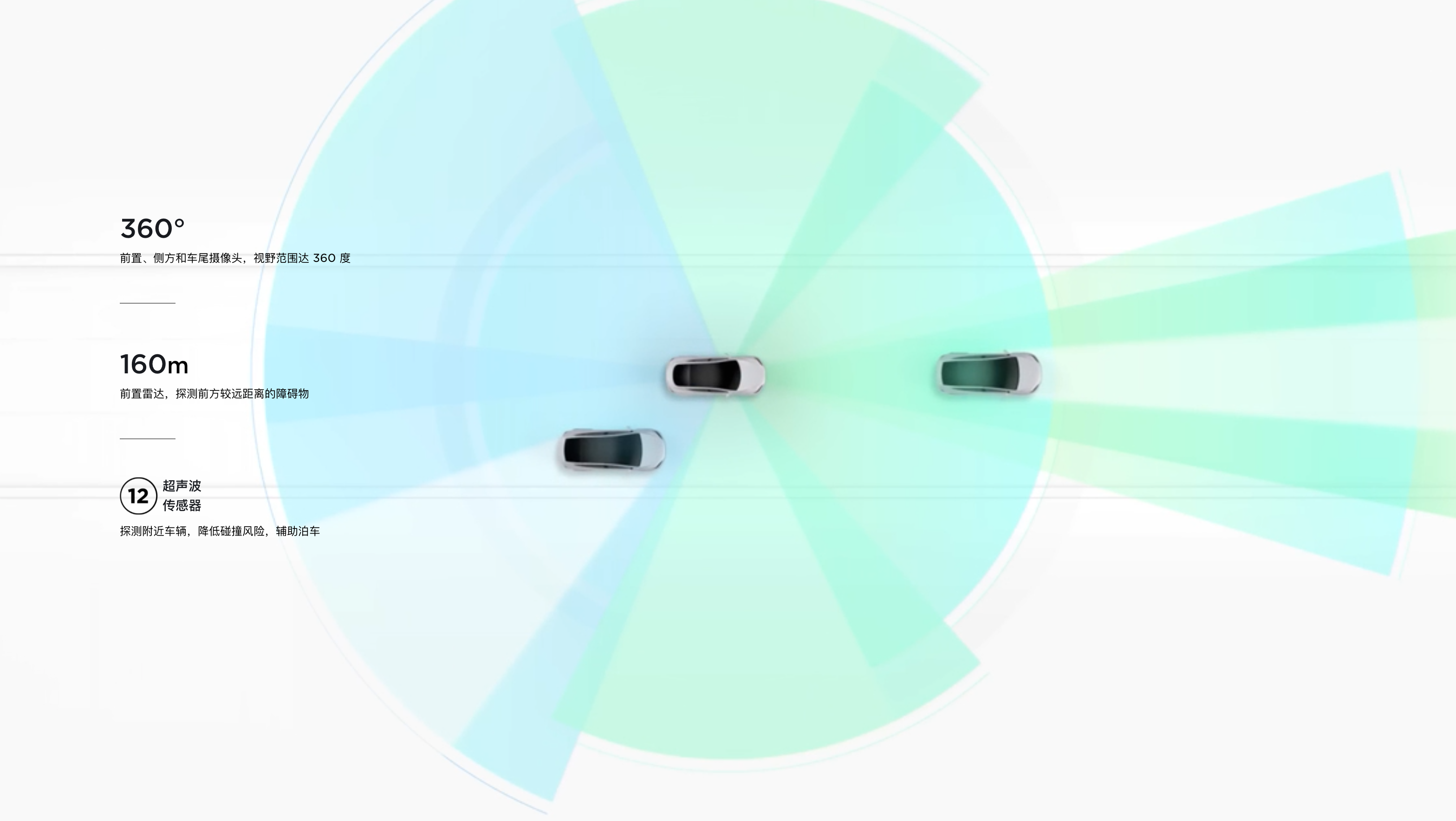
Take the Tesla Model 3’s use of a tri-camera as an example. One is a telephoto camera that detects up to 250 meters away; one is a mid-range camera that detects up to 150 meters away; the wide-angle camera detects up to 60 meters away, but has a detection angle of 120 degrees.
Models with only one camera must rely on a mid-range camera that balances detection distance and detection angle. However, when passing through turns with large curvature, the camera’s detection capabilities become limited. The limited detection angle confines the detection range, and if passing larger curvature turns, the system needs to have some predictive ability of the lane lines in the blind spots and continuously adjust predicted routes based on real-time detected information.
This has two possible outcomes. The system will abandon or exit the assisted driving process if the curvature is too large, or continuously correct the vehicle’s trajectory based on the detected results, leading to noticeable zigzag movement when turning heavily.
For assisted driving with high precision maps, these are all known information. For instance, the Cadillac CT6 could forecast curvature, slope, and speed limit information of the next 2.5 kilometers, so it performs more calmly when passing through larger curvature turns.
In summary, when relying solely on single-vehicle perception, the assisted driving system requires higher vehicle recognition and detection capabilities. On the preconditions that recognition capabilities are not significantly improved, borrowing external forces to bring better user experiences is also an excellent way.
To the extent that Cadillac CT6’s usage experience on a closed road scenario is already on par with Tesla’s with limited computing power and perception hardware.
So, what are the limitations of high-precision maps at the current stage? Will using high-precision maps automatically improve user experience?
The answer is, of course, negative.
The Limitation of High-Precision Maps
As mentioned earlier, using high-precision maps is equivalent to borrowing strength from the outside. Therefore, how much improvement can be achieved in user experience depends on the strength of external forces.
The most common choice in China is to borrow from AutoNavi.Currently, the update frequency of the high-precision map of Amap is once every three months, and it takes a year to update the road data for the whole country. With the current speed of infrastructure construction, this speed is obviously too slow.
During this 2,100 km experience, we also encountered two newly built highways, which were not updated in time, resulting in no road data in the system and Super Cruise unable to be activated.
Therefore, improving the collection and update speed of high-precision map data has become an important cornerstone for the experience of automated assisted driving.
Currently, Amap’s collection relies entirely on specially equipped vehicles, which have low efficiency and high cost, and it is difficult to make qualitative improvements before large-scale commercial use.
Lang Xianpeng, the general manager of Ideal Auto’s autonomous driving, revealed in an interview with Jianyue Car Reviews that “the real-time update frequency of L4-level autonomous driving on maps has a minimum requirement of daily, and some important information even needs to be hourly.”
In order to improve the efficiency of high-precision map collection, some autonomous driving companies or automakers have already begun to use crowdsourcing methods, by recording road condition data through vehicles equipped with forward-looking cameras, and then feeding back to the data center, to extract valuable information through algorithms.
Although this is a very efficient collection method, it requires extremely powerful data processing capabilities behind it. At the same time, the collecting companies need to have relevant map collection qualifications, which will not be elaborated here.
It can be clear that high-precision map data can effectively improve the experience of automated assisted driving, but there are still significant limitations in terms of collection speed and update frequency. As high precision map demand continues to increase, this phenomenon is gradually beginning to change.
In addition to high-precision maps, the importance of individual vehicle intelligence cannot be ignored, because map data is only a restoration of road information. Prior to the popularization of V2X, the detection of other traffic participants relies entirely on the perception ability of the vehicle itself.
If the ability to identify pedestrians suddenly rushing out on the road or vehicles stranded in the middle of the road is not available, relying solely on high-precision maps can only remain at the L2 stage.
When General Motors launched Super Cruise in 2017, it was very forward-looking to choose high-precision maps. So we hope to glimpse some future trends from General Motors’ planning for the future.
On August 19, 2020, Doug Parks, Vice President of Global Development and Supply Chain at General Motors, told us at GM’s Technology Outlook Day that GM plans to launch an enhanced version of Super Cruise simultaneously in the Chinese and US markets in 2021. It can achieve automatic lane change according to the driver’s requirements, and richer and more timely map data can make the system activation more convenient.
In addition, General Motors has developed a new generation of electronic architecture called the VIP architecture, which has increased data processing speeds by five times and provides higher bandwidth to meet the iterative needs of Super Cruise.
Bo Lili, President of General Motors China, stated in a speech: “We are actively studying how to introduce the next-generation Super Cruise into China and provide intelligent driving experiences from point A to point B.”
From the above two speeches, we can make two rough judgments.
- Based on the new VIP electronic architecture, the Super Cruise to be launched in 2021 will have over-the-air (OTA) iteration capabilities.
- Providing “point-to-point” intelligent driving experience means that the usage range of Super Cruise is not limited to closed sections such as highways and overpasses, but will also have assisted driving capabilities on city roads.
These two points seem familiar, right? Yes, that’s how Tesla did it.
In 2017, General Motors launched Super Cruise based on high-precision maps in North America, while Tesla launched Autopilot based on HW 2.5 hardware at the same time, achieving NoA on highways.
In the past two and a half years, Tesla has been taking small steps and rapid iterations, significantly improving its perception capabilities and user experience of Autopilot.
Mercedes-Benz and BMW have also taken new actions. So, how will General Motors, which once had a “forward-looking” strategic judgment, bring itself back to the forefront of the industry with the next-generation Super Cruise?
The focus is all on the Super Cruise release conference.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.