Author: leon1741
As we all know, the CAN network has many advantages such as easy implementation, scalability, and support for complex topologies, so it has been widely used in various industries, especially in the automotive field. However, it also has many issues, the biggest of which is the low bus bandwidth and data field length, resulting in very limited carrying capacity. Therefore, CiA (CAN-in-Automation, International Users and Manufacturers Association) introduced CAN FD (CAN with Flexible Data rate). CAN FD inherits the main characteristics of the CAN bus, but makes up for the constraints of CAN bus bandwidth and data field length. The main differences between CAN FD and CAN bus are as follows:
Variable data rate:
CAN FD uses two bit rates: the data rate from the BRS bit in the control field to the ACK field (including the CRC delimiter) is variable, while the remaining parts use the rate of the original CAN bus. Each bit rate has a set of bit time defined registers. In addition to using different bit time units TQ, the allocation ratio of each bit time segment can also differ.
New data field length:
CAN FD has greatly extended the length of the data field. The maximum DLC is 64 bytes, which is the same as the original CAN bus when DLC is less than or equal to 8. However, when DLC is greater than 8, there is a nonlinear growth, so the maximum data field length can reach 64 bytes.
CAN FD introduces faster bit rates, up to 5 Mbit/s in the data phase, but the consequences are limited by strict topological constraints due to signal ringing. This limits CAN FD to linear networks, restricting design freedom and increasing wiring and system costs. Therefore, at the 17th International CAN Conference (iCC) in 2020, CiA introduced the third generation CAN communication technology, CAN XL.
What is CAN XL
CAN XL is a highly scalable communication technology involving bit rate and data field length. The physical layer is still under development. The goal is to achieve a bit rate of up to 10+ Mbit/s. CAN XL is optimized for region-oriented heterogeneous network architectures. This method meets the requirements of future automotive networks with the optimal length. The automotive industry tries to minimize wiring to minimize weight, or in other words, to limit energy consumption. Its several expected core features are as follows:
-
Effective payload length: same as Ethernet frame length;
-
Reliability: equal to or better than CAN, CAN FD, and 10 Mbit/s Ethernet stability;
-
Robustness: as good as CAN FD, or even better than 10 Mbit/s Ethernet;- Baud rate: Maximum transmission rate of 10 Mbit/s for data segments;
-
Compatibility: Backwards compatible with CAN FD.
CAN XL is a further extension of CAN and CAN FD, largely following the same operating principles. CAN messages are divided into arbitration fields and data fields. Although CAN XL uses low speed rates of 500 kbit/s to 1 Mbit/s in the arbitration field, the transmission rate in the data field can be increased to 2 Mbit/s to 10 Mbit/s. Unlike CAN FD’s optional rate switching function, CAN XL enforces rate switching.
In addition, bus access still uses CSMA/CD (Carrier Sense Multiple Access/Collision Detection), with access permission issues resolved through bit arbitration. CAN XL follows a strict priority concept, allowing more important messages to be transmitted without delay. CAN XL supports only 11-bit identifier IDs, no longer using 29-bit identifier IDs. With Hamming distance 6 algorithm used for header and frame and format checking, CAN XL ensures high reliability of data transmission, which in fact exceeds the FlexRay and Ethernet CRC functions.
However, improving data transmission rate is not the only important thing for future applications. One of the main functions of CAN XL is supporting variable lengths of 1 to 2048 bytes in the data field. When necessary, Ethernet frames can be packaged as CAN XL messages and directly or indirectly using IP communication technology.
CAN XL inherits from the classic CAN and CAN FD, and reduces the speed and coupling gap between CAN/CAN FD and Ethernet. In suitable application areas, CAN XL can use smaller and cheaper controllers. With an effective data length of up to 2048 bytes, CAN XL provides the required features for future transmission of Ethernet frames and use of IP communication. In the near future, this means that CAN XL and 10base-T1S can jointly provide connectivity between signal-based communication and service-oriented communication. By appropriately extending the protocol layer, richer possibilities will be provided for applications.
CAN XL Vs CAN FD
Many students ask, what are the differences between CAN XL and CAN FD? The following is a detailed comparison.
 Compared with CAN FD, CAN XL adds more bits;
Compared with CAN FD, CAN XL adds more bits;
These additional bits are located at the beginning and end of the message;
Most of the required bits are CRC, which must be added to protect more bytes beyond.
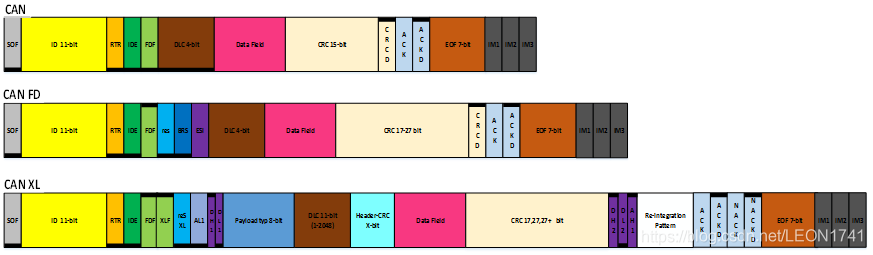
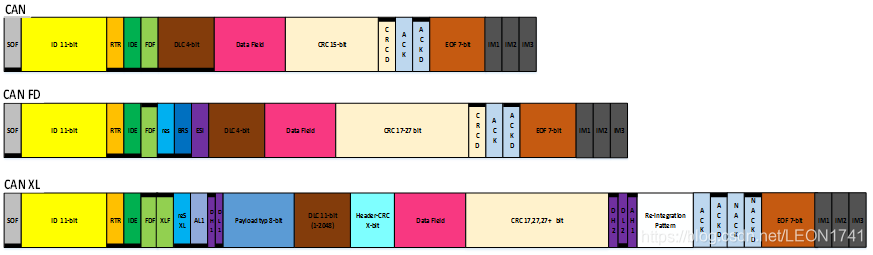
Header section

The black line at the top of the figure indicates “recessive”, and the black line at the bottom indicates “dominant”. Then we can draw the following conclusions by analyzing the figure:
-
SOF and the 11-bit CAN ID field are universal in CAN, CAN FD, and CAN XL;
-
CAN FD and CAN XL never support RTR remote requests;
-
CAN XL does not support IDE identifier extensions (29-bit CAN ID), this bit is always dominant;
-
The recessive FDF bit indicates CAN FD, and the recessive FDF and XLF bits indicate CAN XL;
-
In CAN FD, the res bit is always dominant, and the recessive BRS bit (bit rate switch) will increase the transmission rate;
-
In CAN FD, the ESI bit is usually dominant, but it will become recessive in case of passive errors;
-
The resXL bit in CAN XL is recessive and can be used for future extensions;
-
AL1, DH1, and DL1 in CAN XL are new bit rate switching sequences;
-
Payload 8-bit in CAN XL is used for predefined multiplexing bits for different data packets;
-
In CAN XL, DLC is an 11-bit integer, and the number of data bytes is the integer plus one;
-
In CAN XL, Header-CRC is used to ensure the correctness of DLC, and DLC defines where the data CRC starts.
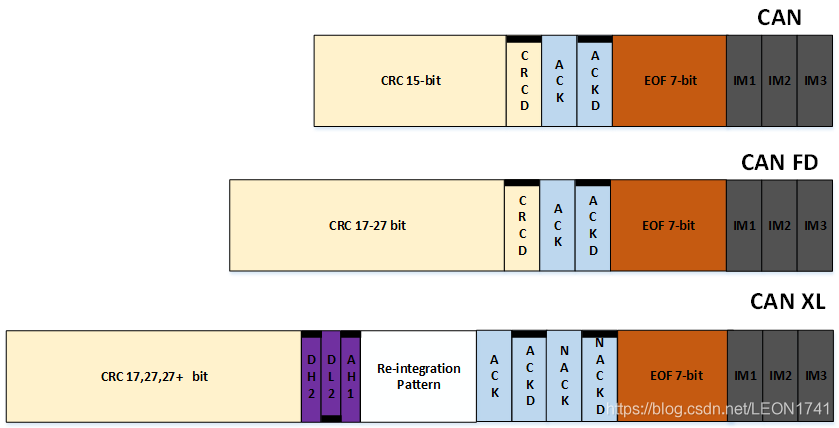
Footer section
-
For the same data length, the longer header in CAN XL may require a longer CRC;
-
CAN XL includes a bit for bit rate switching to ensure forward compatibility;
-
After CAN XL CRC is the bit rate switching mode, not the CRC delimiter;
-
In order to ensure re-synchronization to the end of the frame in the future format, integrated format: place the NACK added to the old ACK in CAN XL.
There is more data in each CAN frame in CAN XL: 1-2048 bytes, and the bit rate is increased in the data part, with better fault protection measures, which is better prepared for the next generation of CAN.
Q&A1. Are there corresponding transceivers and controllers for CAN XL now?
A: Currently, because the CAN XL standard has not been officially released, it is estimated that the transceivers and controllers for CAN XL will be launched in 2 to 3 years.
-
Is ordinary twisted pair still used for CAN XL transmission? Can CAN and CANFd nodes coexist on one bus?
A: Regarding the transmission cable, CiA is still further confirming because the cable is actually a very important part, and a more cautious and guaranteed solution will be adopted.
Regarding the coexistence of CAN, CAN FD, and CAN XL nodes on the same network, in fact, all three can theoretically be on the same network, but the premise is that they all support the new MICI interface specifications, that is, medium-independent CAN interface.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.