Today, Li Xiang released the fourth round of L9 spoilers, focusing on assisted driving. In addition to a text description, Li Xiang also released a video showcasing the world as seen by the L9.
Although the overall hardware is consistent with the first-tier new forces, we also discovered many ingenious ideas from Li Xiang.
First, let’s take a look at the core information:
- 1 128-line lidar
- 4 360° panoramic cameras (2 million pixels)
- 7 assisted driving perception cameras (6 8-million-pixel, 1 2-million-pixel)
- 2 NVIDIA Orin X processors (508 TOPS computing power)
- 5 intelligent driving auxiliary lights
- Capacitive steering wheel
- Fully self-developed
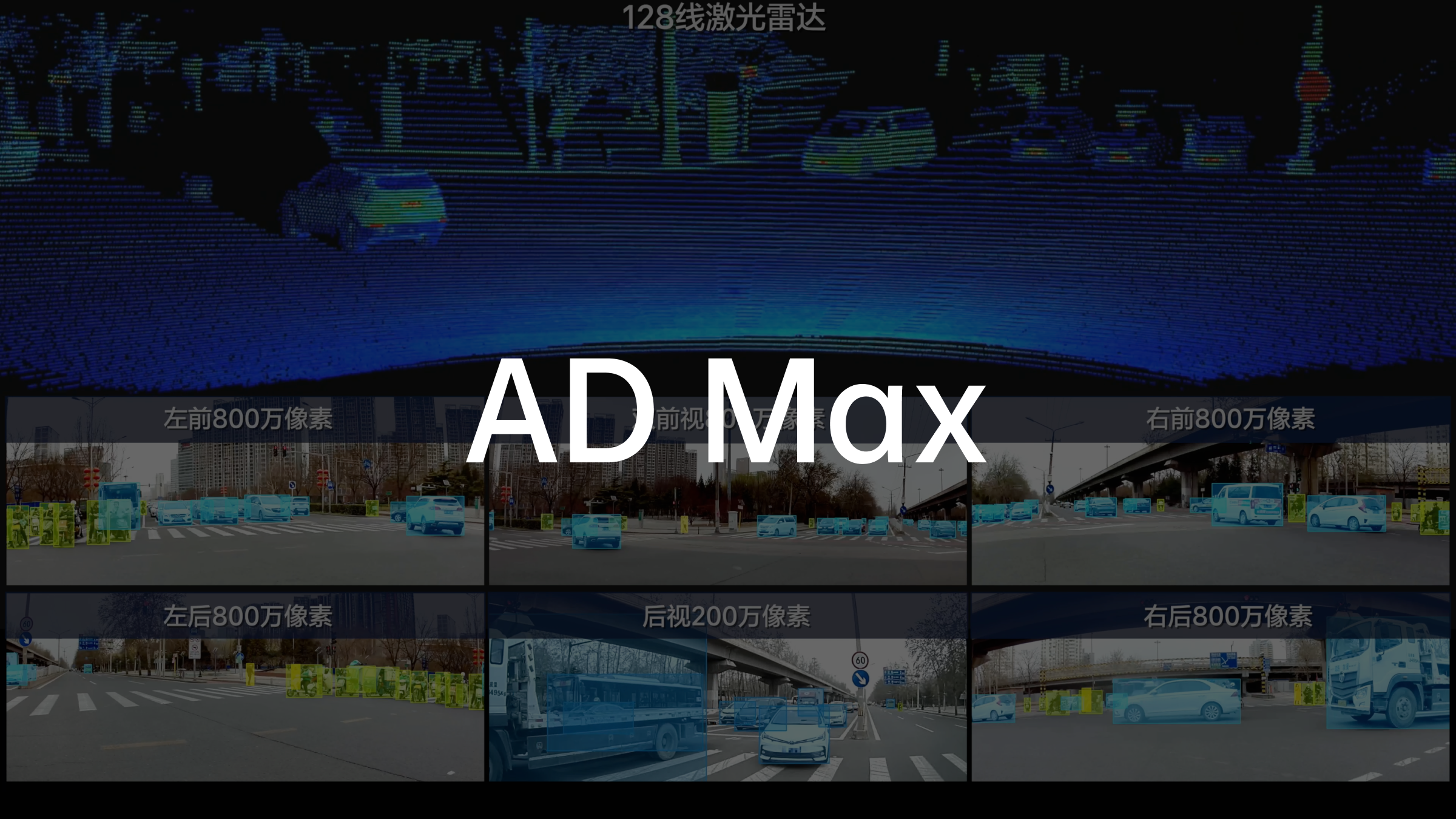
An 8-million-pixel world
First of all, as expected, Li Xiang upgraded all the assisted driving cameras to 8 million pixels. This is a very clear industry trend. As the ability of assisted driving increases, the demand for perception also increases significantly. As the main sensor, visual cameras must take preemptive action.

Compared with 2 million pixels, 8 million pixels have significantly increased the pixel points of objects such as cones and pedestrians in the perception image. More pixel points can help the system to perceive earlier and make more accurate judgments.
In the early days, due to the low pixels, Tesla, NIO, and other models equipped three front cameras: a medium-focus camera as the main equipment, a long-focus camera responsible for ultra-long-distance detection, and a wide-angle camera to reduce forward perception blind spots.
As pixels increase, we begin to see more and more models, replacing the front three cameras with two cameras.
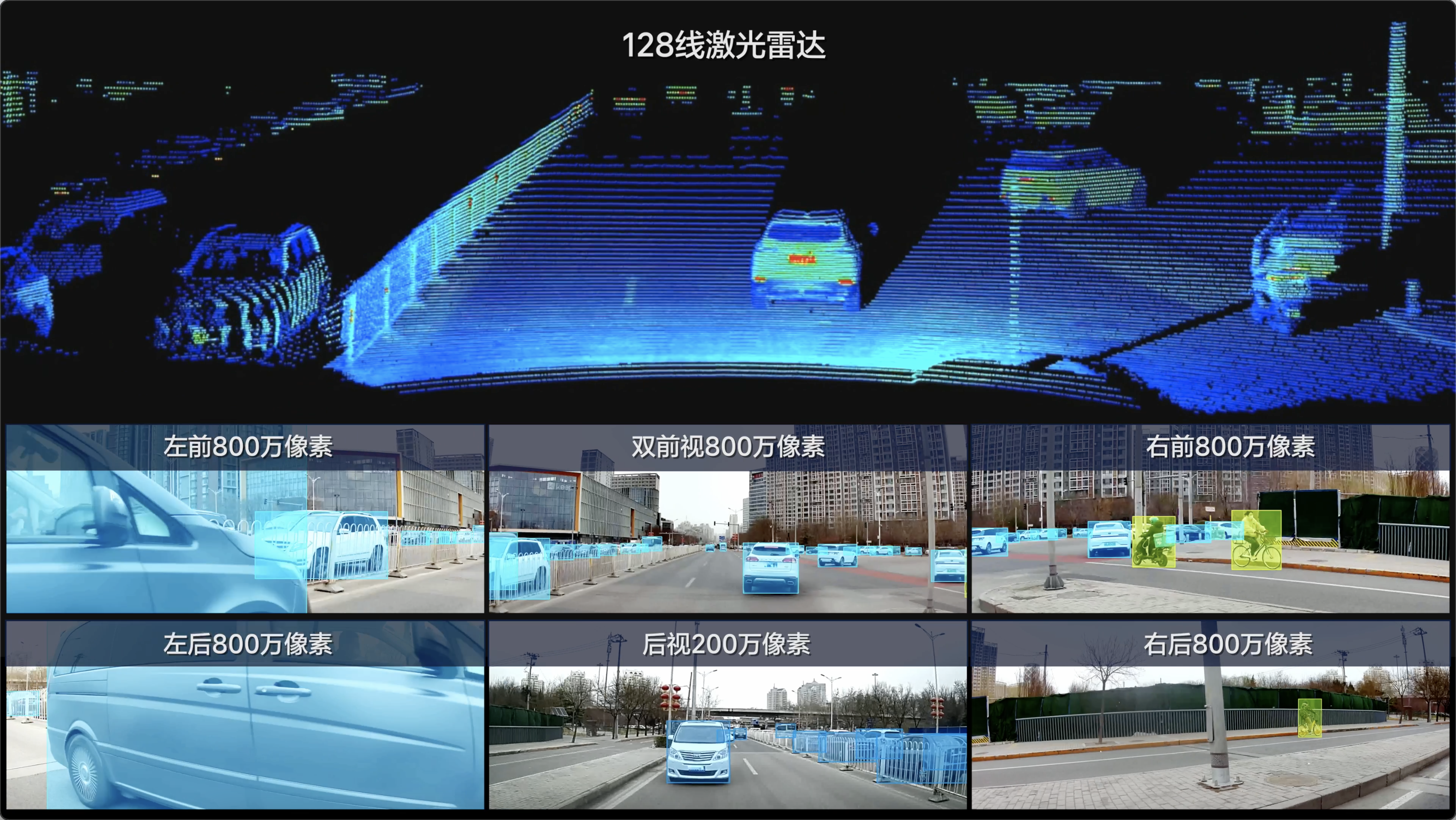
On the Li Xiang L9, two front 8-million-pixel cameras can achieve coverage of a 120-degree wide angle range, while also recognizing vehicles, pedestrians, cones, and other objects within 550 meters.
In addition, the Ideal L9 is equipped with 2 8-megapixel front side cameras, 2 8-megapixel side rear cameras, and 1 2-megapixel rear-facing camera, achieving 360-degree perception of the vehicle’s surroundings. However, due to less demand for rear perception, Ideal used a 2-megapixel camera for the rear camera.
For the panoramic view, Ideal uses 4 2-megapixel cameras, which is an improvement over the current model, but more efforts are needed in software for image splicing, distortion control, and low light conditions to achieve better panoramic view effect.
In addition to achieving the 360° reverse image function, these 4 panoramic cameras will also be used for the visual fusion parking system.
Personally, I wonder if Ideal will also use these 4 panoramic cameras for auxiliary driving perception. In the videos released by Ideal, it can be seen that the side rear camera occupies the entire screen when the vehicle is close to the vehicle, making it weak in close-range perception. Using panoramic cameras can improve close-range perception, which is also a practice of some car companies, but it requires higher algorithm requirements.
LIDAR is indispensable
In the previous report on the exterior, we analyzed LIDAR, and here we will do a brief review and supplement.
Like NIO, Ideal places LIDAR on the roof of the vehicle, with 3 advantages:
-
Due to the higher position of the LIDAR, it can have better detection effects in congested road sections and for distant objects;
-
Since the LIDAR is on the roof, rather than on the bumper, the probability of damage in collision accidents is smaller, and subsequent maintenance costs are lower;
-
As the LIDAR is on the roof, the shape of the bumper does not need to consider the LIDAR, resulting in better results in pedestrian safety collisions.
There are also 3 disadvantages:
-
Although LIDAR manufacturers have made great efforts to control the size of the LIDAR, the overall effect is still very abrupt, and compared with the NIO ET7, the appearance of the Ideal L9 is rougher in design;
-
Since the LIDAR requires a large amount of data transmission and needs to be well-cooled when working, it will occupy more space on the roof, and we hope that it will not take up too much headroom inside the vehicle.- The bulge on the roof of the car will bring more wind noise, which greatly tests the ideal L9’s aerodynamic coefficient and NVH.
As for the model of the LiDAR, as far as we know, it adopts Hesai Technology’s AT128 semi-solid state LiDAR, with 128 laser beams, a laser wavelength of 905 nm, a maximum detection distance of 200 meters at 10% reflectivity, and a field of view of 120° x 25.4°.


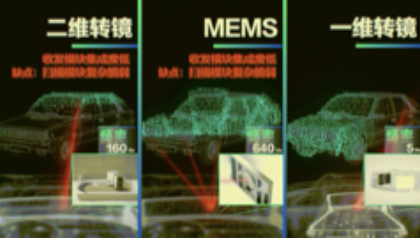
The highlight of this LiDAR from Ideal lies in the use of 128 laser emitters, vertically arranged to form a laser beam, and then through a 1D mirror, the beam is turned into a plane, achieving the detection of the forward environment.
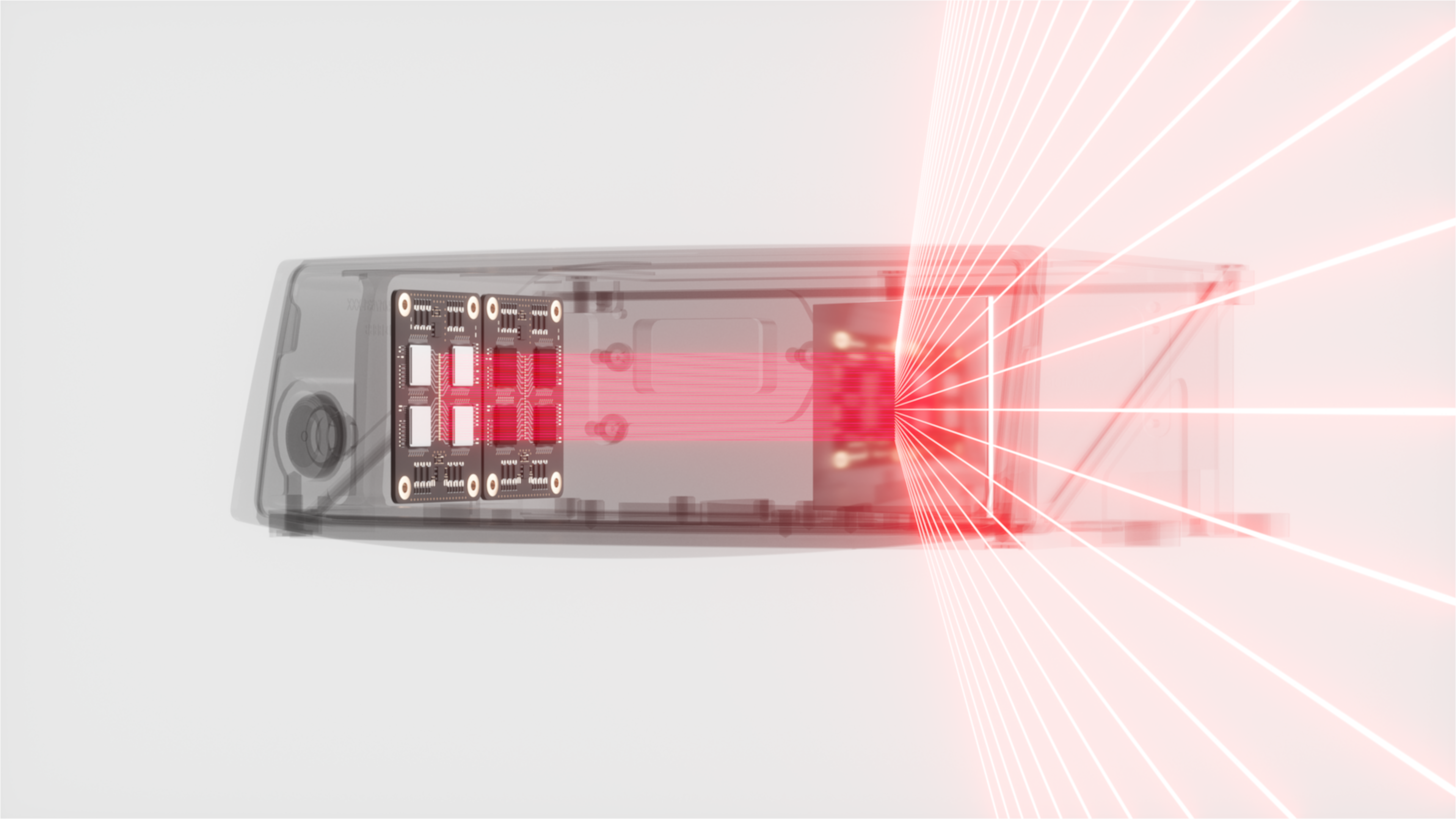
Compared to using a single laser emitter and a 2D mirror to turn the beam from a single point to a plane, this LiDAR from Ideal can achieve a higher point cloud density, similar to a camera, which means higher resolution.
But sadly, the wavelength of this LiDAR is 905 nm, which is lower in power compared to 1,550 nm, so the detection distance will be closer.
As for the final result, we can only wait for the actual experience after the start of mass production and delivery.
508 TOPS computing power + Self-developed software
To process the information generated by the sensors, Ideal uses 2 NVIDIA Orin X autonomous driving chips.
In terms of algorithms, Ideal officially decided to switch from supplier cooperation to full-stack self-development in early 2021, and the 2021 version of Ideal ONE with the Horizon Journey 3 chip is the first answer from Ideal’s self-developed algorithms.
Compared to XPeng, who started full-stack self-development in 2019, Ideal’s self-developed algorithms started later, whether it can catch up with XPeng G9 on L9 will also need time to test.
Doubts about mmWave radar
After analyzing all the hardware, it can be found that Ideal has not mentioned mmWave radar from start to finish. Here, we can make a bold guess: one possibility is that it has used 5 mmWave radars like Ideal ONE, but the official did not mention it.Another possible ideal version of the L9 is without the millimeter-wave radar.
The ideal version specification detailed all the perception hardware and their specific parameters regarding ADAS. However, it conspicuously omitted information on millimeter-wave radar. Thus, we assume that the ideal L9 most likely does not include this hardware.
In the autonomous driving industry, opinions on millimeter-wave radar have always been mixed. In the early stages, when visual algorithms were weaker, the radar provided vital distance information to the vehicle. However, with the development of visual algorithms and the emergence of multi-camera solutions, the accuracy of visual information has become increasingly higher, while millimeter-wave information has produced more and more interference.
An autonomous driving industry engineer has informed us that having too many sensor types makes algorithm integration extremely challenging. When inconsistent results occur, it can be perplexing to determine which one to follow.
Other details
- The ADAS in the ideal L9 is named AD Max.
- The ideal L9’s powertrain, steering system, brake system, and computing platform power system adopt a redundant design.
- The ideal L9 uses a capacitive sensing steering wheel, fatigue and alertness reminder systems.
- The main driver’s seat is equipped with electrically pre-tensioned seat belts.
- The ideal L9 is equipped with five intelligent driving auxiliary lights, located at the vehicle’s four corners and below the tail light strip.
- The interior 3D ToF sensor and outside cameras can achieve sentry mode covering both inside and outside of the vehicle.
Finally, welcome to join our Ideal L9 community. We also welcome you to click on the link for more information, feedback, and discussion regarding the Ideal L9.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.