
High-Precision Maps
Definition of High-Precision Maps
What are high-precision maps? Just as the name suggests, high-precision maps are maps that provide higher accuracy and richer map information compared to ordinary maps.
High-precision maps are also a type of semantic map constructed by fusing data obtained from various sensors using SLAM/SFM or other algorithms to create a high-precision three-dimensional point cloud map. Elements used on the point cloud map or image are classified and extracted, followed by vectorization and lane association of different elements. Quality verification is then performed to form a map engine that stores and supports the requirements of other modules. The map engine is the data management service of high-precision maps that encapsulates the organizational and management mechanisms of map data, which shields the underlying data details and provides a unified data query interface to application layer modules.
Status of High-Precision Maps
High-precision maps serve autonomous vehicles and are the core basic module of autonomous driving. Through a unique navigation system, high-precision maps help solve system performance problems, expand sensor detection boundaries, and make up for system defects. The biggest characteristic of high-precision maps is their accurate and comprehensive representation of road features: adding lane properties, elevated objects, guardrails, roadside surfaces, traffic signals, and road vehicles’ driving status, and possessing richer semantic information.

High-precision maps are mainly applied to the four scenes of high-precision positioning, environmental perception, decision-making planning, and simulation operation. They mainly help solve the problem of navigation difficulties such as weak GNSS signals in tree-lined roads, positioning and perception of traffic lights, and intersection responsibility. Autonomous driving obtains information from sensors, but the distance of sensors is limited, and they are also affected by surrounding factors such as heavy rain and complex light. The limitation of the distance of sensors means that the driver has limited time to make decisions, and limited time means that the driver may make wrong or untimely decisions, which could result in accidents. The impact of the surrounding environment can also lead to inaccurate information transmission. In response to this, the advantage of high-precision maps is that they can know the road conditions ahead of time, inform the driver in advance, and make decisions in advance, which greatly improves the driver’s driving experience, avoids hurried and hasty driving states, and reduces traffic accidents.### Creating High-Precision Maps
Take a novice driver as an example: when driving in the leftmost lane on a highway, if they miss the instruction to turn right and enter a big corner 500m ahead, they might panic and fail to prepare for the lane change. This is a common problem for many novice drivers who are often nervous and might overlook important information. With high-precision map data, however, they can lock in the area in advance and be reminded by location information to change lanes and prepare for the next move based on positioning data.
In the Apollo architecture, high-precision maps are split into the cloud service layer, along with simulation platforms and other key components. This highlights the importance of high-precision maps in the development of autonomous driving technology.
So, why do we need to create high-precision maps? Can’t we just use maps from professional and authoritative sources such as Baidu or Gaode? If we need ordinary maps, we can easily find any map provider and make minor adjustments to their mature map products, adding periodic map data updates to provide this service to relevant companies, who will then pay for as many licenses as the number of cars using the maps. However, high-precision maps require map compilation and construction processes involving surveying, compilation, and manual verification.
High-precision map creation involves 4 steps: data collection, data processing, element recognition, and manual verification.

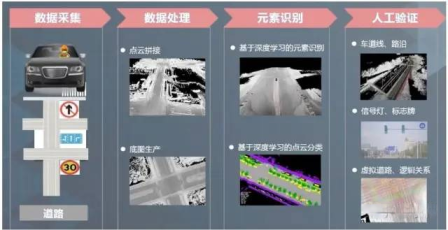
-
Data Collection: This is an intensive task that usually takes around a month or longer to complete for a project. Relevant complex data collection equipment, such as laser radar, cameras, gyroscopes, data storage, and computer equipment, are installed on the collection vehicle. During the process of vehicle operation, all the surrounding environmental information is collected and stored. This is a critical step in creating high-precision maps. Roads are constantly changing, with the possibility of road demolition and reconstruction, but high-precision maps need to be kept up-to-date. A large amount of long-term vehicle collection can ensure that changes to roads can be updated quickly and promptly. (For more information on data collection, see this article: How Important Is Data Collection for Intelligent Driving? – Zhihu (zhihu.com))
-
Data Processing: The data collected is processed into an initial map template without any semantic information or annotations.
-
Element Recognition: The important task in this step is to classify the content, including lane lines, traffic signs, vehicle types, and even utility poles.
-
Manual Verification: The aim of this step is to ensure the orderly and timely detection of problems during the automatic map creation process.
Surveying and Mapping Compilation
Background
After completing manual verification, the next step is map publishing. Map publishing means that various merchants can use it for their own project development and for external use. This involves our surveying and mapping compilation. So, what work do we need to do if we want to publish high-precision maps for commercial use? Below we introduce compilation and encryption deflection.
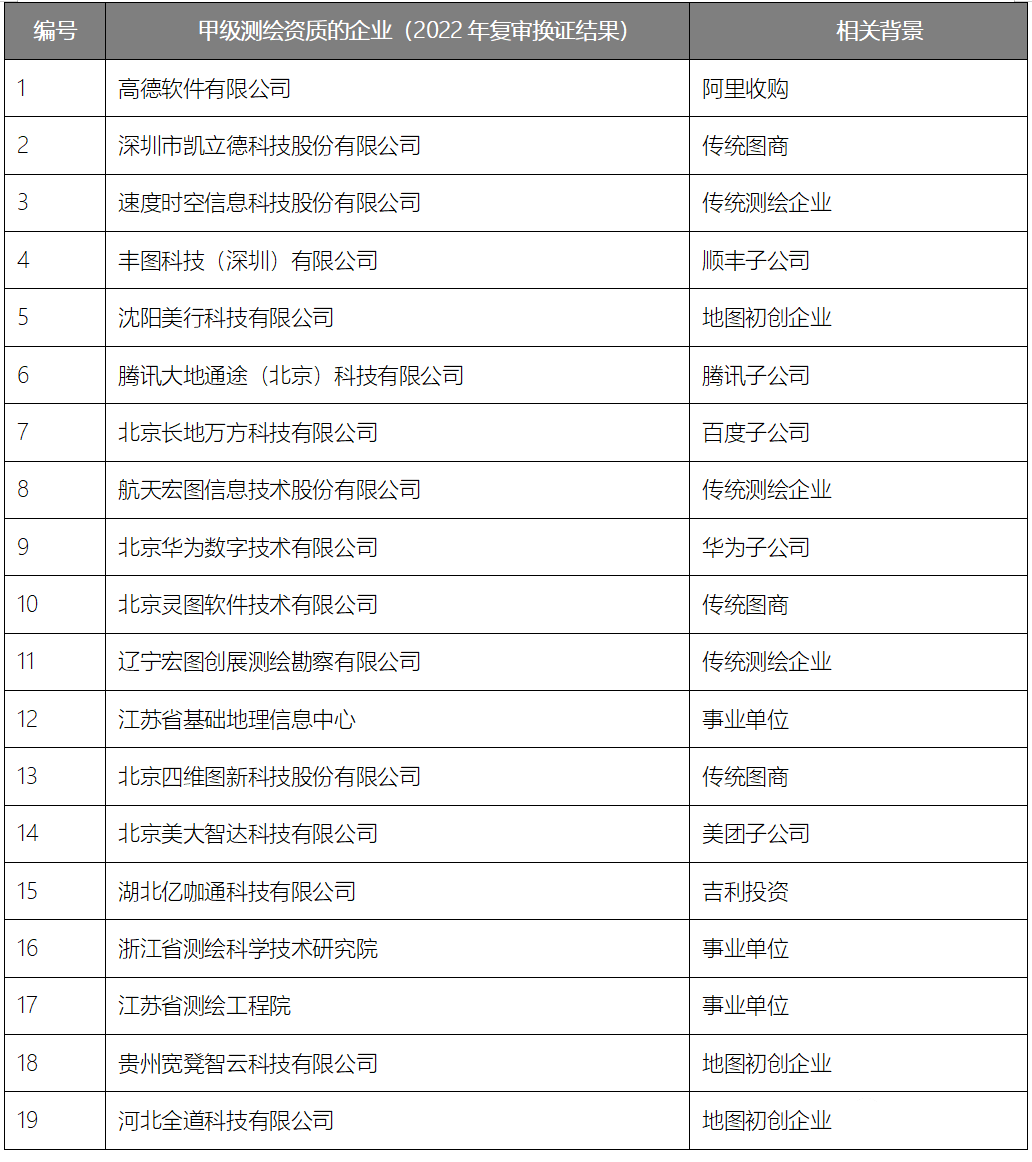
According to the clear provisions of the National Administration of Surveying and Mapping, high-precision maps belong to a new type of navigation electronic map and an important component. Units with qualifications for the production of navigation electronic maps must be responsible for data collection, editing, processing, and production. Therefore, the premise for producing high-precision maps is to have qualification in map surveying and mapping.
 Before high-precision mapping can be released for commercial use, it must undergo encryption processing by the National Mapping Bureau to ensure national security. This mainly includes some security information, such as GPS coordinates, Martian coordinates, and Earth maps. Simply put, navigation devices need to incorporate the country’s confidential plugins in order to be used and made publicly available.
Before high-precision mapping can be released for commercial use, it must undergo encryption processing by the National Mapping Bureau to ensure national security. This mainly includes some security information, such as GPS coordinates, Martian coordinates, and Earth maps. Simply put, navigation devices need to incorporate the country’s confidential plugins in order to be used and made publicly available.
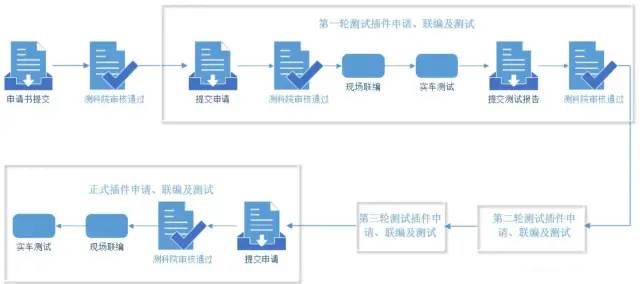
Surveying and Mapping Compilation Steps
-
Application submission: The application materials usually include the application form, surveying and mapping compilation plan, and testing plan. After preparing the submission, wait for review.
-
On-site compilation: National staff will compile the source code and encryption plugins.
-
For commercial map data, verification can be done in batches and in different regions. After all regional verifications are validated, an application can be made for a national map, and subsequent commercial use can take place.
The steps in the figure below may seem cumbersome, and we need to go through three rounds (sometimes even more) of plugin application before we can obtain the official compilation. In actual operation, this task is time-consuming and the cost to hire a mapping company is high; these are also why many bloggers have questioned whether high-precision maps have become a burden. The reason for the long time is that the review time of the Surveying and Mapping Institute is long; we need to follow their process and sometimes can only wait for notification. After the first on-site compilation is completed, we obtain temporary plugins for real-car testing and submit relevant test reports for review. Then repeat the first round of review and testing, and only after passing can we apply for the official plugin and obtain the official plugin after it is approved.
Encryption Plugin
Simply put, the encryption plugin is used for data encryption, which is generally done by relevant departments of the Ministry of Natural Resources. The confidential plugin is artificially used to process data encryption and deviation, and the algorithm is used to encrypt the real coordinates into false coordinates for external use.
 ### Integration Module with Plugins
### Integration Module with Plugins
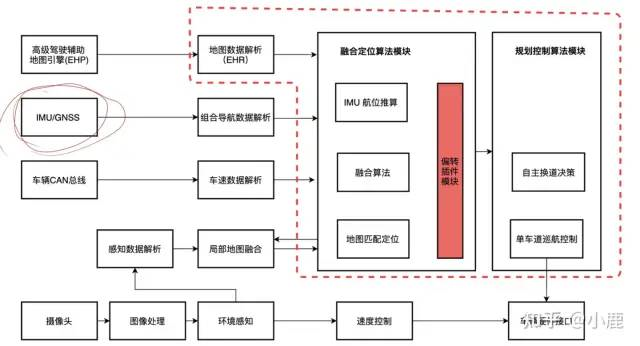
The contents in the red box shown in the figure below is the integration module with plugins. The fusion positioning module accepts and analyzes inputs such as IMU/GNSS integrated navigation, CAN vehicle speed, and environmental awareness, and implements IMU dead reckoning through relevant algorithms. The module combines GNSS global positioning and vehicle speed, as well as matching positioning results of perception and maps, to achieve high-frequency vehicle attitudes and related functionalities required by the control module. Therefore, it can be understood that our high-precision map plays an important role!
Summary
The above introduces the general situation of high-precision maps and surveying and mapping integration. Following is a summary:
It can be shown that high-precision maps play an important role in the autonomous driving industry. They provide more comprehensive and accurate map information, detect the surrounding environment in advance for autonomous driving, provide a safe driving environment, and offer safety redundancy. They can be regarded as a car’s “long-term memory”. High-precision maps can compensate for the performance limitations of sensors. As a carrier for planning and decision-making, the surrounding environment can be transmitted to the high-precision map service platform, which enables more precise path planning to be carried out intelligently. While driving, it can give more reasonable driving paths in a timely manner. On complex roads, it can provide drivers with more reference information to prepare for measures in advance. High-precision maps also possess a large amount of driving data, and the richness of database provides the basis for data sources for simulation verification of autonomous driving systems.
Note that: Only those with map surveying and mapping qualifications can complete the steps such as data collection and processing for creating high-precision maps.
However, if high-precision maps need to be used for commercial purposes, it involves a time-consuming and complicated process: surveying and mapping integration. Surveying and mapping integration is a necessary process for high-precision maps to be published for commercial use. Before publishing for commercial use, the data must be processed with encryption biasing. It is not allowed to output the original data coordinates directly, which threatens national security. After integration with encrypted distorted data, the map merchants need to use the same plugin to ensure the matching of positioning and navigation electronic maps. All map engine companies that require car navigation need to include national confidential algorithms in the software, encrypt and convert the read real coordinate information into confidential coordinates required by the state. This way, the map engine software and navigation map can match completely, the vehicle can obtain correct GPS information, and can work normally without discovering deviation or inaccurate positioning.Advantages of high-precision maps and the convenience they bring to the smart driving industry are undeniable, but how important are high-precision maps really? Do they need to be popularized in the smart driving industry? In other words, whether high-precision maps are a necessary basic condition for autonomous vehicles is a matter of debate due to the complexity and uncertainty of the application process. My position is that high-precision maps have propelled the development of the smart driving industry and to some extent, improved driving comfort and convenience. Of course, if we move away from high-precision maps, I believe there are other ways to make up for the shortcomings and limitations of sensors.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.