Author | Panjiang
According to different brake actuators, Brake-By-Wire systems can be divided into Electro-Hydraulic Brake (EHB) and Electro-Mechanical Brake (EMB). Among them, EHB is currently the mainstream technology based on traditional hydraulic brake systems, which replaces some mechanical components with electronic devices and uses brake fluid as the transmission medium. At the same time, it has a hydraulic backup braking system. According to the degree of integration, EHB can be divided into Two-box and One-box solutions.
With the expansion of the new energy vehicle market, “eBooster + ESC” has become the most mainstream Two-box solution on the market. In addition to realizing basic brake assist functions and stability control functions, this solution can also coordinate and cooperate to ensure consistent pedal feel for the driver during the switch between electric and hydraulic braking while achieving brake energy recovery.
On the other hand, the line control brake is also the only way to support the braking system for cars towards a higher level of autonomous driving. With the popularity of advanced driver assistance systems and autonomous driving systems (including autonomous parking), “eBooster + ESC” as the mainstream brake redundancy solution on the current market has a greater stage to play.
Requirements of the braking system for autonomous driving
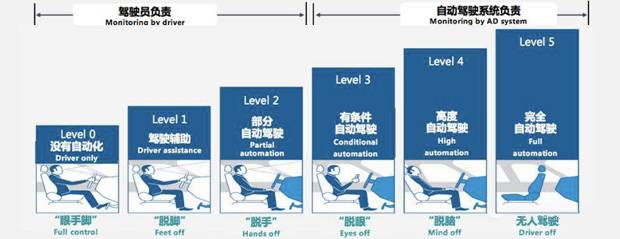
The core of an autonomous driving car is redundancy design, which is the consensus reached by the industry. Based on the SAE J3016 classification of automatic driving levels for cars, further classification can be made:
- Advanced Assisted Driving (including Level 1/Level 2)
- Autonomous Driving (including Level 3/Level 4/Level 5)
 # Difference between ADAS and Autonomous Driving Cars
# Difference between ADAS and Autonomous Driving Cars
The biggest difference between ADAS (Advanced Driver Assistance Systems) and autonomous driving cars lies in the responsibility for accidents caused by system failures:
- For ADAS, in case of system failures, the responsibility lies with the driver, as long as the system reports the failure correctly. The driver’s skill decides whether the accident is avoided or not. The car manufacturer will not be held responsible.
- For autonomous driving, after system failure occurs, the system must operate to avoid accidents on its own (the higher the level of autonomous driving, the later the driver intervenes or even does not intervene at all). If accidents happen, the responsibility lies with the car manufacturer rather than the driver.
Based on this situation, redundant designs are needed for autonomous driving cars to ensure that the system can take over until it enters a safe state in case of system failure, thus avoiding the risk of personal injury while freeing the driver.
Currently, the industry generally agrees that vehicles that support Highly Automated Driving (HAD) require at least the following redundancy to ensure that the vehicle can enter a reasonable and safe state promptly after a single failure.
Regardless of whether the safety state is defined as “staying in the current lane” or “stopping on the emergency lane,” brake system redundancy is indispensable.
Besides HAD, autonomous parking technology is also a continuous research object for domestic and foreign car manufacturers. Remote Parking Control (RPC) and Automated Valet Parking (AVP) have been launched successively. RPC allows the driver to get off the vehicle and activate the entire parking process remotely (via the car key or a mobile app). The whole parking process is completely autonomous by the system, but the driver is still required to be within a certain range (EU regulation ECE-R 79 requires a radius of no more than 6m) from the vehicle. AVP is considered the optimal technical solution to solve the “last one-mile freedom” pain point for drivers. Simply put, AVP provides the following two major functions, fully meeting the ultimate imagination of the public for autonomous parking:“`

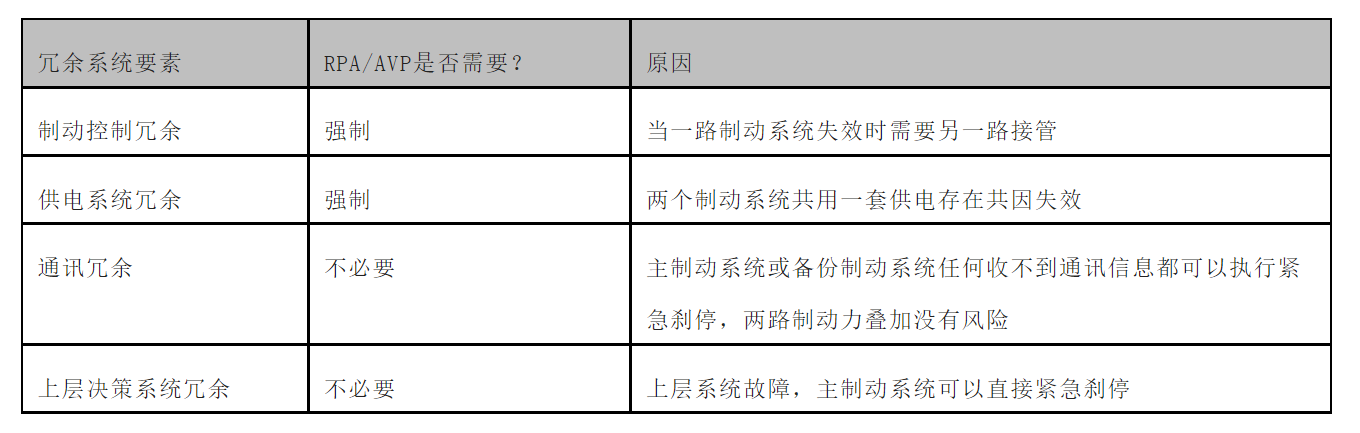
When it comes to the implementation methods, the RPA and AVP solutions from different manufacturers vary greatly and present a diverse trend. However, if we only look at the emergency handling methods for the parking process, everyone follows the same path and executes emergency braking without exception. This way of handling is reasonable and easy to implement for the parking scene, because the maximum operating speed of RPA and AVP does not exceed 15kph. Quick braking of the vehicle can avoid collision accidents, or reduce the collision speed to a very low level, thus reducing collision injuries.
As a result, the requirements for redundancy of RPA and AVP are relatively lower than those for high-speed autonomous driving, but brake redundancy is still indispensable.

Introduction of ESC+eBooster redundant braking scheme
As mentioned earlier, before the advent of autonomous driving, many new energy models in the market were equipped with both ESC and eBooster systems, with the aim of achieving better recovery performance using eBooster. ESC and eBooster share a hydraulic system in the car and work together in coordination.
Therefore, unlike other redundant systems in autonomous driving systems (HAD/RPA/AVP), the design of brake redundancy does not require additional electronic control products, and only slight modifications are needed on the basis of the existing ESC and eBooster systems, which is both concise and cost-effective. It is precisely because of this that ESC and eBooster have become the golden combination of redundant braking schemes that support autonomous driving in the current market, and are widely used in mainstream intelligent driving models such as the entire Tesla series, NIO ES8, Xpeng P7, LI ONE, Changan UN-T, Great Wall Mocha and Zeekr 001.
The autonomous driving requires not only the ability of the current normal braking system but also the ability of fast fault detection, the self-inspection ability of the actuator, and the ability of quick selection of the actuator when a failure occurs. The vehicle is required to have redundancy in longitudinal stability, steering (anti-lock) redundancy, and deceleration redundancy. This requires the vehicle to have two sets of braking systems with additional monitoring functions, redundant mode control, and longitudinal stability control.
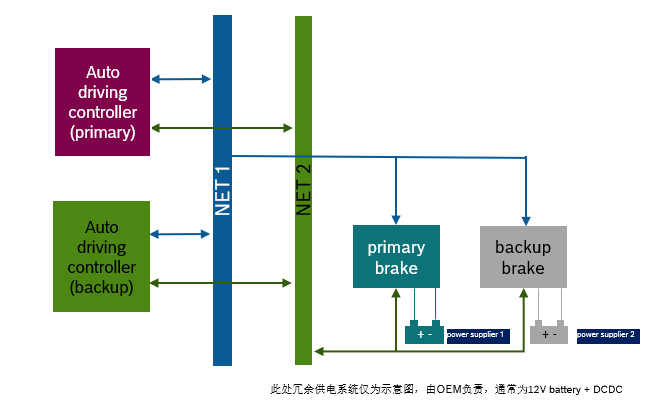
The redundant braking system that supports autonomous driving developed based on the combination of the eBooster and ESC systems, where the ESC and eBooster are connected to two independent power supply systems and their redundant upper-level control units control them independently.
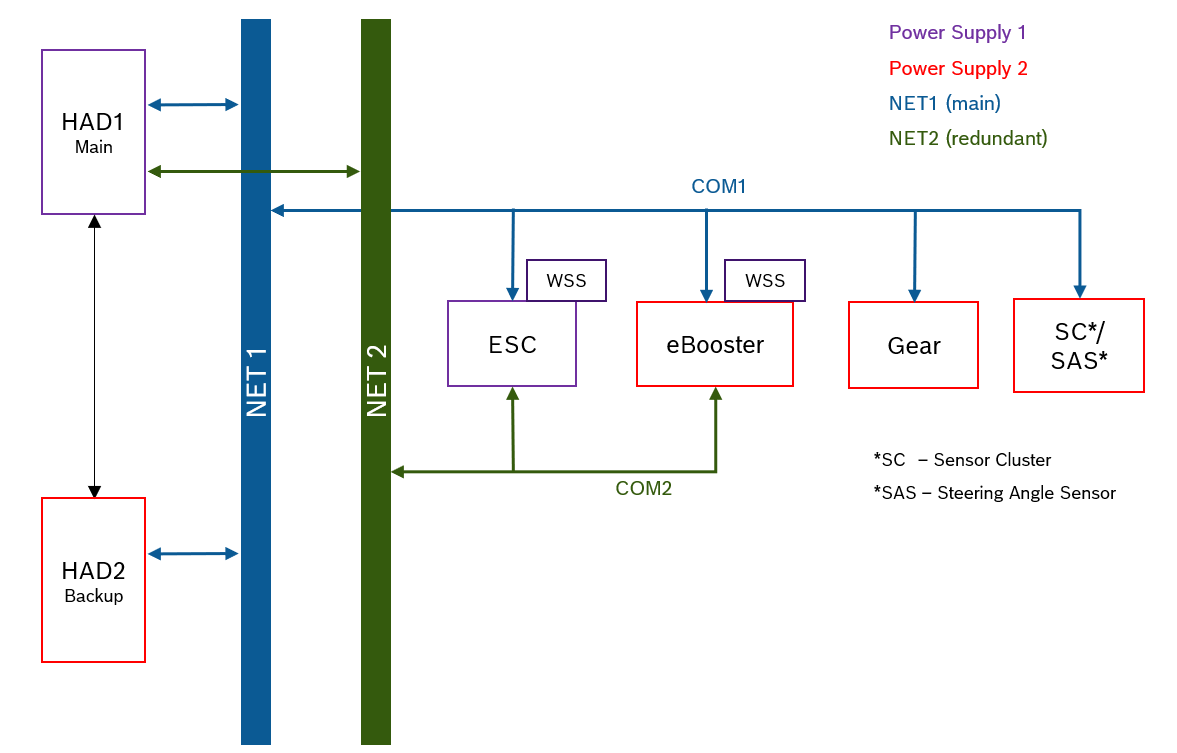
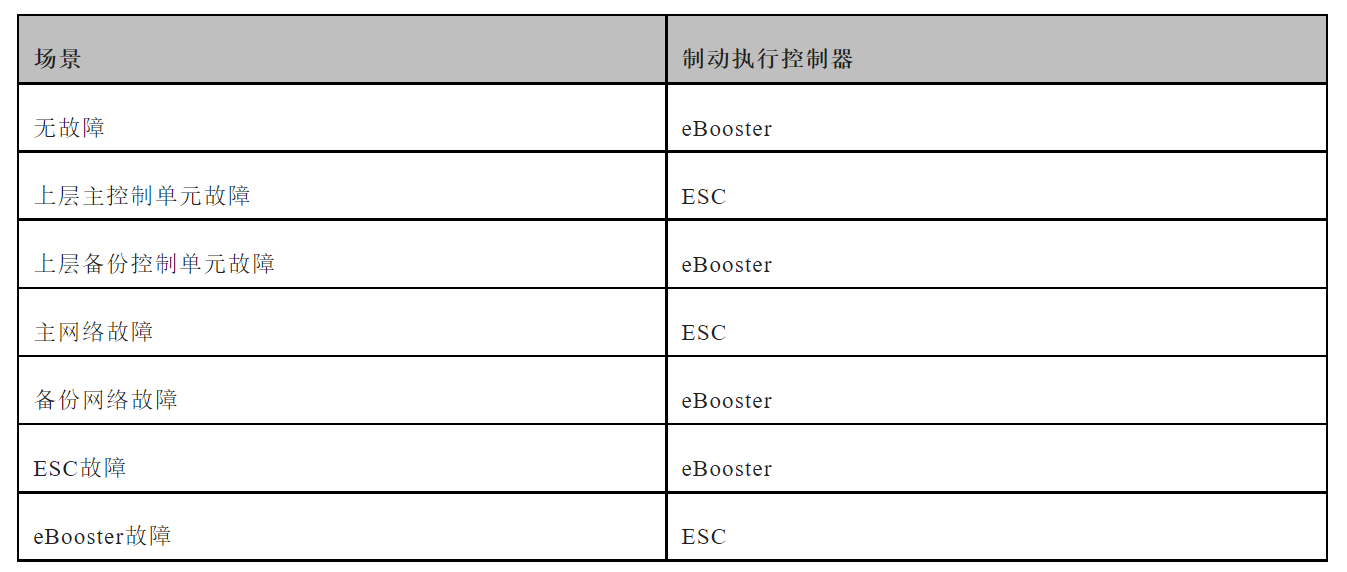
Both the ESC and eBooster can independently brake the vehicle throughout the entire deceleration range. Considering that the dynamic response speed of eBooster is faster than that of ESC in pressure building with better NVH performance, eBooster is the main actuator in the redundant braking system. The control and takeover strategies for this golden combination can be summarized as follows (the strategy is not unique and may be adjusted according to the control strategy of the upper-level control unit):
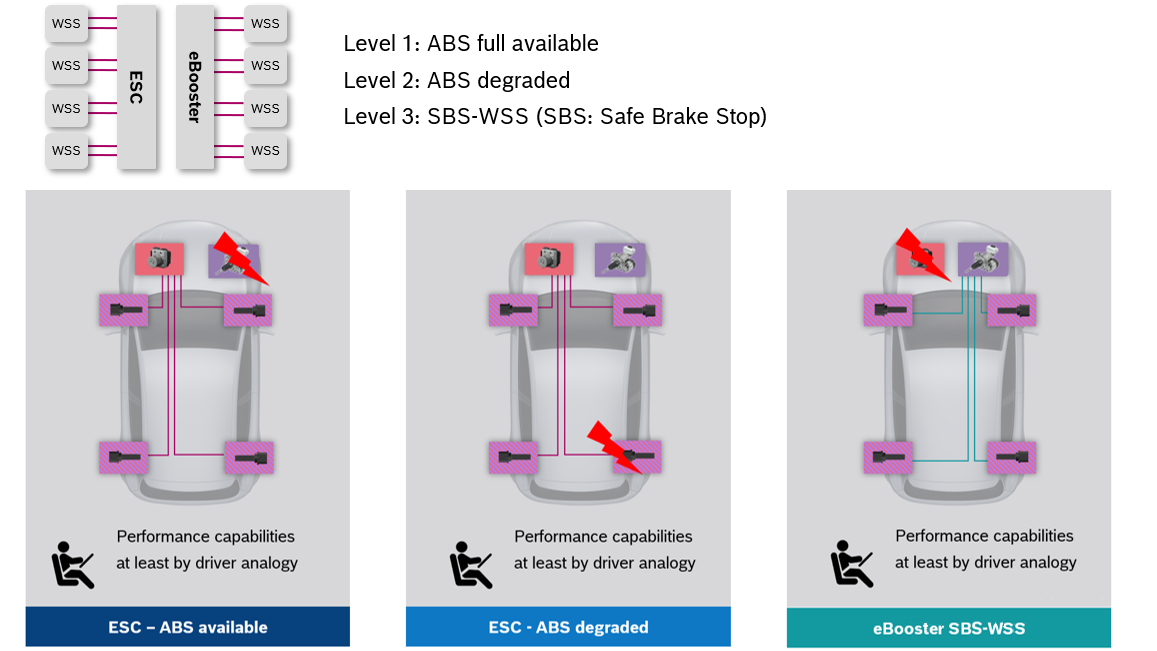
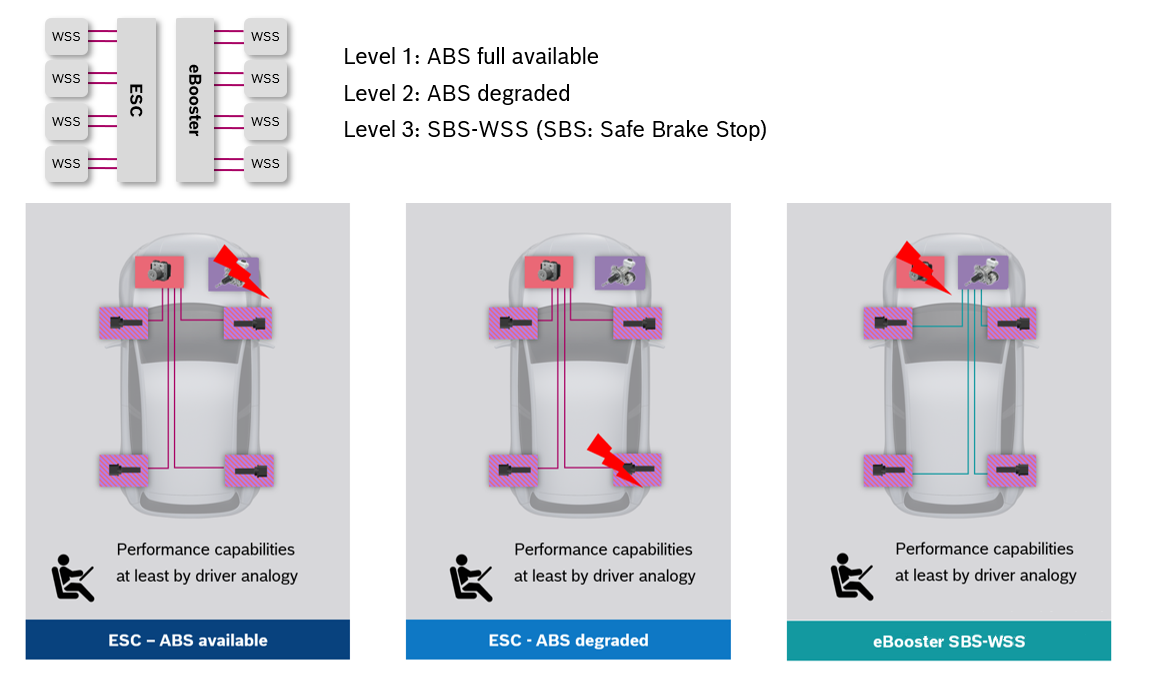
In addition to the stability function ABS already carried by ESC, the demand of longitudinal stability redundancy for HAD scenarios also requires eBooster to have certain longitudinal stability control ability, which ensures the stability of the braking system in the event of any single fault. Currently, Bosch's "three-level ABS" solution based on redundant wheel speed sensors is the mainstream solution in the market.```
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.