
The Long Cruise Mode in Intelligent Driving System
Following the previous discussion on the intelligent cockpit’s impact on intelligent driving functionalities, the control process of vehicles in the iteration of intelligence gradually becomes more complex, and their mutual influence is inevitable. Especially for those basic functions strongly related to vehicles, we need to study them thoroughly to ensure that the entire operational performance of traditional vehicles is not compromised while iteratively updating intelligent driving functionalities. In the previous article, we explained the impact of image display functions highly relevant to intelligent cockpit on intelligent driving. This article will continue to elaborate on how basic control functions of vehicles, including active suspension and long cruise mode, affect intelligent driving and propose corresponding optimization strategies.
The “long cruise mode” of new energy vehicles is a deep optimization of vehicle accessory power consumption on the basis of ECO mode, significantly reducing overall vehicle energy consumption while maintaining the basic functions of driving and safety, thereby further enhancing the vehicle’s range, meeting the increasing demand for increased range in emergency or special situations.
Range anxiety has always been a concern for users of new energy vehicles. In most cases, the actual range of the vehicle is significantly shorter than the official data. Currently, the range of electric vehicles is mainly measured by NEDC (New European Driving Cycle) test, but this standard is not a completely accurate reflection of the actual usage scenarios of new energy vehicles, especially in advanced automatic driving systems, intelligent connectivity, and other related applications. Therefore, when developing range performance for intelligent vehicles in the context of emerging automotive industries such as autonomous driving and intelligent connectivity, we need to start from users’ actual usage scenarios and implement a series of measures to create a more attentive and durable “long cruise mode” for intelligent vehicles.
 We need to explain the long endurance function from two aspects: intelligent driving and intelligent cockpit.
We need to explain the long endurance function from two aspects: intelligent driving and intelligent cockpit.
With the gradual improvement of the computational capacity of high-order intelligent driving domain controllers, it is often necessary to consider the degree of their overall power consumption. We can distinguish two points to explain:
Firstly, its calculation and operation power consumption, that is, the many levels of software and hardware control, including hardware drivers, operating systems, bottom-layer software, middleware, network management, diagnosis, power management, top-level application software, etc. All of them need to be considered in its actual running process. And for its top-level application software, its power consumption will vary to some extent in several areas, including perception fusion, planning control, and execution.
For example, in visual perception, AI computing resources like the MMA accelerator or DSA are needed for deep learning, neural networks and other algorithms, which are power-hungry. In addition, considering the diversity of data sources, throughout the entire floating-point and logical operation process, the entire CPU resources will be fully utilized, which is another source of power consumption.
In addition, considering that intelligent connected vehicles may have certain requirements for wireless networking, the entire driving process will schedule modules such as the positioning module, navigation map, V2x, and other wireless signal transmit/receive modules for global position search and peripheral environment detection. If the driving process is not in a strong signal area (such as a valley, urban forest, etc.), the entire connected positioning module will repeatedly start the signal search unit to collect data, and the power consumption will be much faster, similar to when we use our smartphones in places with poor signals.
How can we reduce this type of power consumption? For the former, one way is to call the computational control unit of the entire domain control unit in a time-shared manner. For example, if most of the time, all modules in the domain control are started due to the awakening of the whole vehicle network, can we consider closing certain sub-modules in a timely manner when the driver is not using them, and only maintaining the lowest power consumption state? Of course, if some functions such as AEB need to be started and detected at all times, the entire domain control function operation still needs to be activated separately.In addition, for scenarios where applications that utilize the 5G wireless signal are desired, a fully adaptive function switch and weight adjustment can be implemented. For example, if the signal is consistently weak within a certain driving range (perhaps due to lack of signal enhancement from base stations or signal forwarding from relay stations), consider disabling some of the location-based inputs for intelligent driving that rely on wireless signals, and allocating more weight to the local sensor unit. If certain functions require some form of wireless signal transmission data, proper degradation can be considered. For example, warning and control can be taken earlier by leveraging traffic lights and intersections. From the user’s perspective, other functions seem less important compared to whether the car can even be operated.
Secondly, are there any measures that can be taken during the execution of the intelligent driving system to reduce power consumption? For example, when using functions such as cruise control (which is not typically influenced by power consumption considerations), the aggressive calibration of the process and adjustment of the following distance can help prevent being crowded. However, an unfavorable effect of such calibrations is that they may cause frequent intervention by the vehicle’s acceleration and braking systems. Clearly, such driving processes would cause significant power consumption for the vehicle. If this happens during an expected EV driving process that enhances the driving range, it will undoubtedly be unacceptable to users. This can result in two different outcomes: users either abandon the ADAS function, or make every effort to reduce the “power-hungry” aspects of the ADAS functions. Obviously, these are not the outcomes we want to see.
How can we improve the driving efficiency of our ADAS functions and reduce power consumption? First and foremost, we need to be people-centric and fully respect users’ choices. We can recommend some low-power-consuming functions at the activation point of driving. Additionally, from an energy-saving perspective, we need to minimize the power consumption of the overall system architecture as much as possible. For example, the ADAS functional unit can monitor the remaining power and whether the entire vehicle has entered a long-cruising state in real-time and providing two sets of driving parameters.
-
When the power is sufficient, the parameter variable “close distance follow-up braking” in the calibrated follow-up driving parameters can be called for control, to improve driving experience and reduce the collision risk caused by inserting and close-range cutting.
-
When the power is below a certain level, the parameter variable “far distance follow-up braking” in the calibrated follow-up driving parameters can be called for control, to improve driving experience and reduce strong braking and heavy acceleration from standing start. In addition, during the braking process, regenerative braking can be realized by reversing torque using the VCU for anti-drag and utilizing the entire braking system’s IPB for energy recovery. This is also necessary for improving the overall range.
-
When the power continues to decrease and the whole vehicle starts to work in long-range cruise mode, the high-power consumers of the entire vehicle intelligence domain control and cabin domain control can be turned off or operate at the lowest power consumption. Some functional sub-items can also be placed in sub-modules for separate control (such as transferring small functions like LCDA lane merging assistance from domain control to sub-ECU corner radar). This can greatly reduce the overall functional power consumption.
Active Suspension Mode in Intelligent Driving System
For the increasingly intelligent traditional cars, configuring active suspension is already a less intelligent and unexpected novel feature. Active suspension mainly takes into account the ride comfort and handling stability of the car, fully considering the stiffness and damping characteristics of the suspension system, and dynamically adapting to the driving conditions of the car, so that the suspension system is always in an excellent shock-absorbing state. Specifically, when the car body sensor carries a weight or when road conditions change, the active suspension can adjust its own parameters to keep the car’s ground clearance at a reasonable level.
It should be noted here that the change in carrying weight is easy to detect and understand, but the detection of road conditions is not so easy. This includes whether it can predict and plan the driving status in advance (which can be called “feedforward control”), or reduce the discomfort of subsequent driving through feedback adjustment after the actual driving posture of the vehicle (which can also be called “feedback control”). Of course, 4D millimeter wave radar can also achieve such detection function well, but the effect is slightly worse.It is obvious that “feedforward control” is almost impossible on traditional car models, but for smart cars, it can be implemented through various sensors it carries. For example, dual-camera or LiDAR can perfectly detect the distance and position of bumps and dips in front of the vehicle. At the same time, when the distance gradually narrows, this type of sensor can also accurately detect the specific depth and height of its potholes or protrusions.

Obviously, feedforward control can be regarded as an assistive power for improving the highlights of active suspension. Compared with feedforward control, feedback control adjustment uses some commonly used algorithms for lift adjustment analysis, and uses appropriate suspension lift values for vehicle control. Body attitude detection can generally be achieved by detecting the damping strength eta, yaw rate, steering rate delta SteeringAngle, and deceleration rate change rate delta Vehicle Speed. As mentioned above, it is obvious that using the advance detection function of intelligent driving sensors can assist the vehicle to achieve proper body adjustment on the active suspension.
So how will smart driving cars use this type of pre-detection ability for active suspension control? The following figure shows a schematic diagram of the adjustment process of the active suspension.
Active suspension generally has three levels: low “Low”, normal “N”, and high “HI” (of course, some manufacturers may use a five-level mode for development and will timely add extra-low “ExLow” and ultra-high “ExHigh”). In addition, for different models, the adjustment value of the suspension height is different. The adjustment process of the suspension for a certain model is listed as follows:
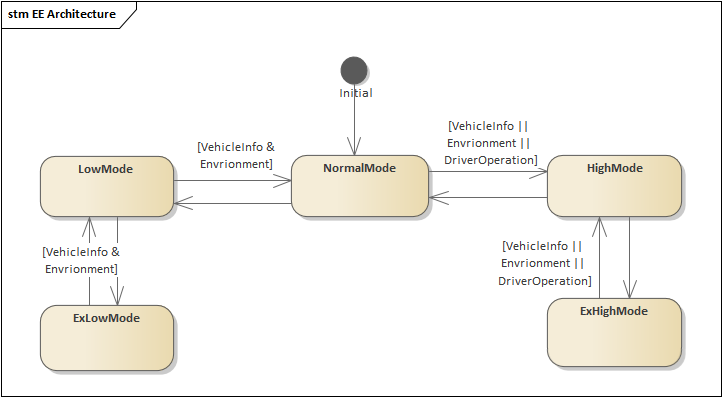
For the specific adjustment process of the active suspension, it is necessary to focus on which mode the adjustment is switched from to another. At the same time, the time required for the front suspension and rear suspension to switch, and whether the front and rear suspensions are adjusted simultaneously (this condition only applies to the adjustment process and methods that must be parallel to the ground during the adjustment process). In addition, if it is necessary to adjust each wheel separately, it is necessary to focus on the attitude calibration of the lifting of each wheel during the development process. If it is set to adjust the front first and then the rear, then it is necessary to control the overall closed-loop based on the adjustment height feedback provided by the height sensor, and immediately close the solenoid valve when the vehicle suspension height is adjusted in place.## The Impact of Active Suspension on the Intelligent Driving System
It is clear from the entire active suspension working process that it will have varying degrees of impact on the entire intelligent driving system, mainly manifested in perception performance and vehicle control. Of course, the specific impact effects need to be identified from actual matching tests to identify higher risk items. In addition, the adjustment process of the active suspension also has different effects due to different adjustment periods. This is mainly reflected in the process of height adjustment, after the height has been adjusted.
During the adjustment process, the fluctuation of perception performance occurs due to the continuous variation of the sensor position. At the same time, changes in vehicle attitude and stiffness may affect the overall vehicle control effect.
After the height adjustment, the new height may require the perception system to match new internal and external calibration parameters based on the new vehicle attitude to ensure detection performance. The change in the vehicle’s center of gravity may also require appropriate adjustments to the control performance, which requires actual calibration and matching.
So how can we ensure that there is no adverse effect on the intelligent driving system while ensuring the basic functions of the active suspension? Here are some suggestions:
-
Firstly, as far as possible, select a sensor installation location with a wide detection feedback. Do not make critical arrangements to ensure that appropriate vehicle attitude adjustments can ensure that sensor detection performance is not limited. Of course, some car models may not be able to provide such arrangements due to limitations in their own styling. In this case, engineers need to calibrate several sets of parameters for the possible adjustment feedback of the active suspension from a practical perspective to adapt the detection capability extension of the entire system. Generally, calibration parameters for the three states of ExLow, Normal, and ExHigh can cover the entire range.
-
Secondly, based on actual conditions, carry out mutual exclusion design of the functions during the function definition process. For example, when the active safety functions of AEB/ELKA are activated, the adjustment of the active suspension function can be suppressed. The adjustment of the active suspension will cause differences in vehicle height, which in turn will lead to differences in sensor height and angle. This will have a significant impact on these safety functions. If the intelligent driving safety system is controlling the vehicle and the user forcefully adjusts the active suspension through manual intervention, the system may judge that it may affect the control of the system. The system can issue alarms via the HMI to warn the driver to take over the vehicle at any time.## Summary
In addition to the two typical functions mentioned above, for the work of intelligent driving systems, there may also be a lot of overlap with the basic functions in the braking system. For example, braking safety-related modes (HDC, HHC, ESP, ABS), as well as power system-related modes (TCS, snow mode, sport mode, cooling mode) and so on. Different demands have been presented for gasoline and new energy vehicles in these subdivisions. For design engineers, it is necessary to pay more attention to the functionality and performance of the intelligent driving system, and ensure the effectiveness of the basic functions of the car from the perspective of the driver.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.