
As a practitioner of intelligent driving, I often test the assisted driving functions of other manufacturers. By analyzing their software and hardware capabilities and actual driving experiences, I compare them with the features I have developed, learn from their strengths, and improve the competitiveness of my own product.
Recently, I have tested many models, including the latest assisted driving functions of IM L7 and Zeekr 001. I have extracted a few points from my comparison materials, analyzing the software and hardware capabilities, as well as the actual driving experiences, for your reference.
Software and Hardware Capabilities Comparison
Perception Hardware Comparison
As we often say, hardware determines the ceiling of software, and software defines the car. Therefore, the first step in analyzing the assisted driving system is to learn how to look at their hardware.
Below is the perception hardware checklist of the two cars that I have compiled.
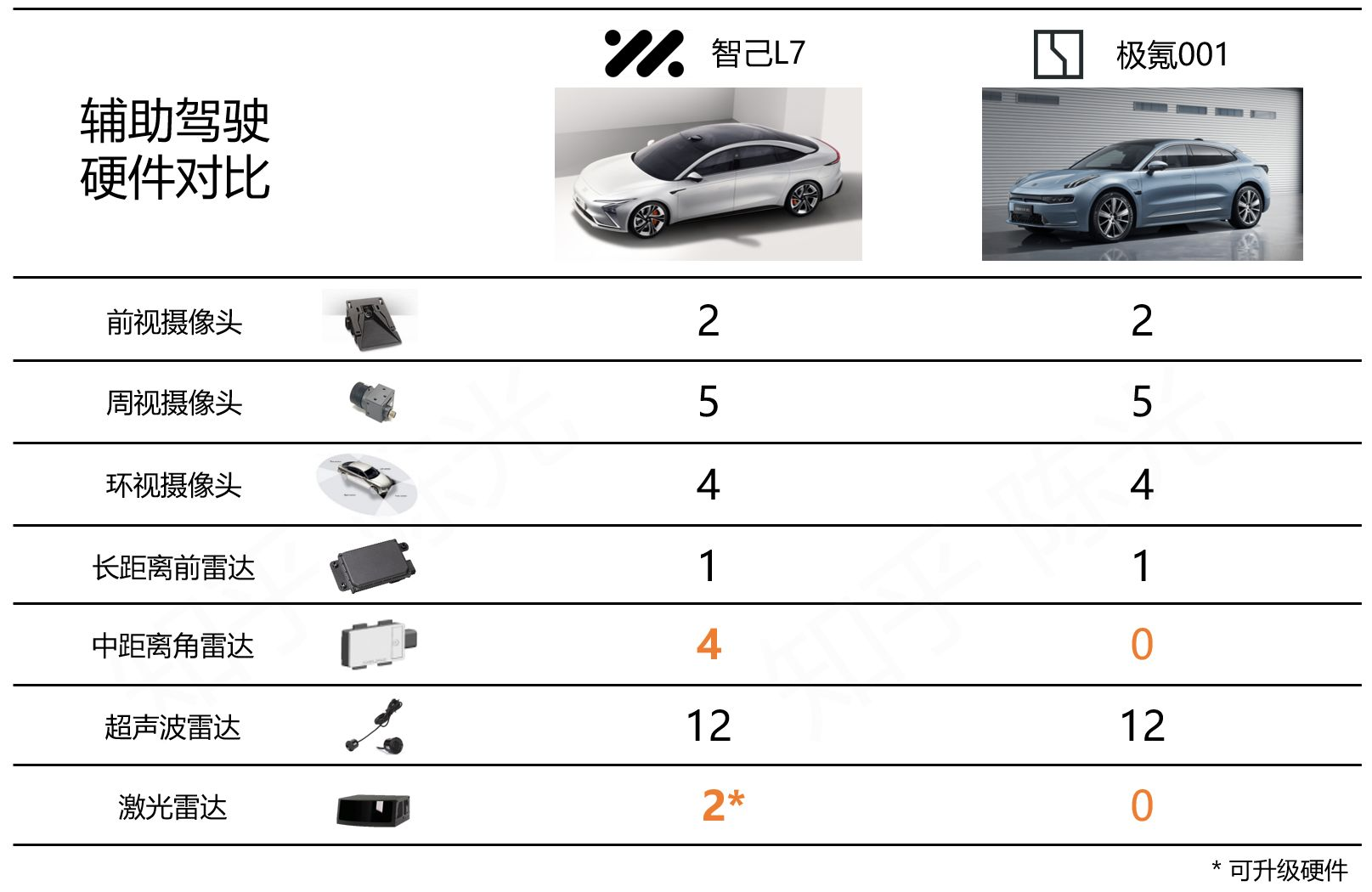
IM L7 and Zeekr 001’s assisted driving systems have many similarities in basic hardware configurations. Both are equipped with 11 high-definition cameras (2 front-facing, 4 side-facing, 1 rear-facing, and 4 surround-view cameras), a long-range front-facing millimeter-wave radar, and 12 ultrasonic radars. The difference is that IM L7 has 4 additional medium-range corner radars compared to Zeekr 001.
In addition, IM L7 has designed a redundant hardware and software architecture for compatibility with lidar sensors in the fields of sensors and computing platforms. Users can choose to upgrade the hardware by installing two lidars to improve the ceiling of the software. Besides lidar upgrade, IM L7 also supports computing platform upgrade, whose main control chip can be upgraded to Nvidia Orin X (254 TOPS), Nvidia’s open computing architecture that can support fast iteration of perception and regulation algorithms to support higher-level automated driving functions.
Zeekr 001’s computing chip is Mobileye EyeQ5. Although Mobileye’s perception ability is good, their architecture is relatively closed, so each upgrade iteration requires a relatively long time. The performance of automated driving depends on the fast iteration of perception and regulation upstream and downstream, fully coordinated, and any uncontrollable factor in any link will result in poor system performance. This is why Zeekr 001’s assisted driving performance has been criticized despite being on the market for a long time.### Comparison of perception range
Without considering hardware upgrades, the perception ranges of the sensors for advanced driving assistance system (ADAS) of ZhiJi L7 and JiKe 001 are shown in the following figure.
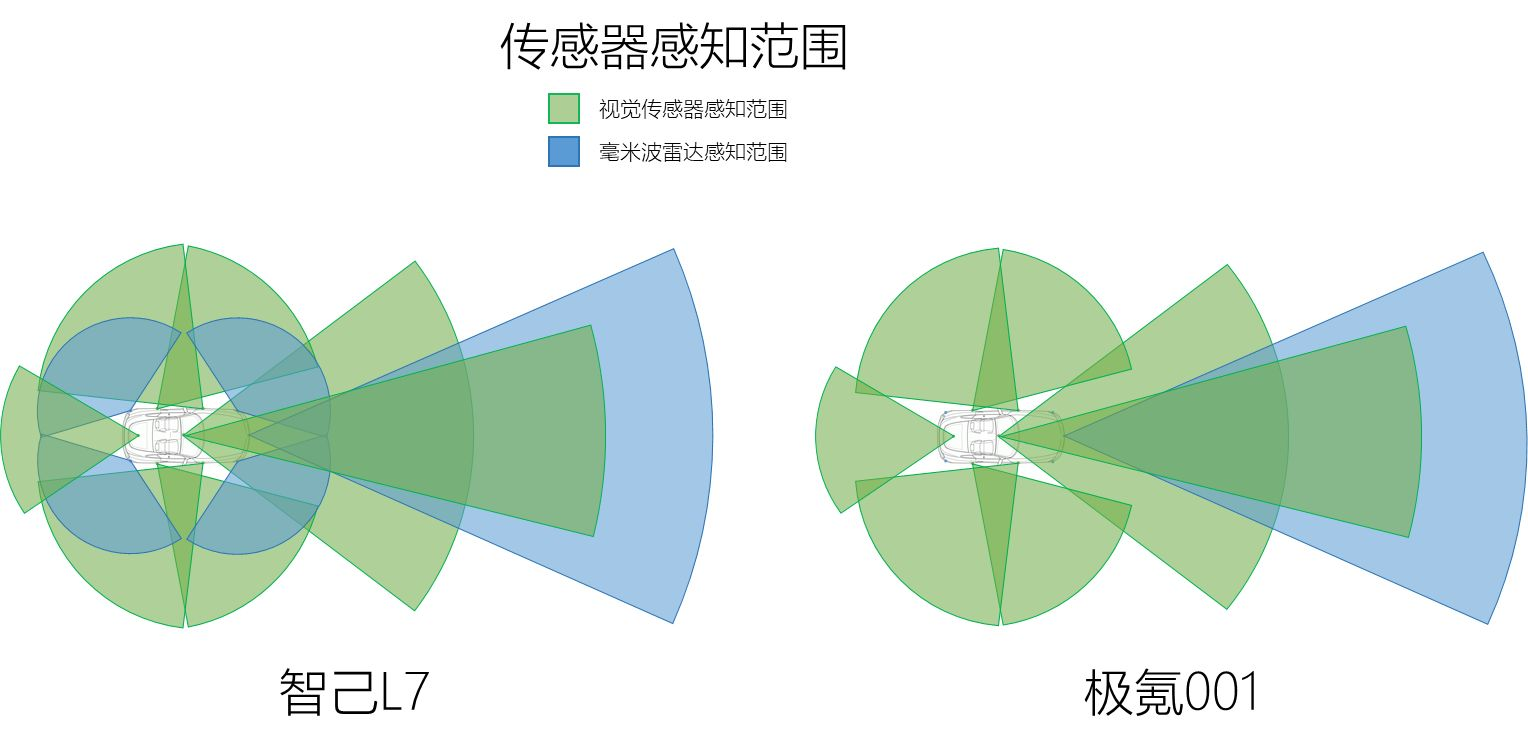
It can be seen that both ZhiJi L7 and JiKe 001 can achieve 360-degree environmental perception capability, but ZhiJi L7 has 4 more medium-range angle radars than JiKe 001, which can further enhance the perception ability of the vehicle’s front and rear sides. This means that even in extreme weather conditions (such as insufficient lighting or direct sunlight), when the visual perception fails, multi-sensor perception redundancy can still be achieved, thus improving the safety when changing lanes with ADAS.
Comparison of software iteration
JiKe 001 was officially delivered in October 2021. In March 2022, it supported the adaptive cruise control (ACC) function in the OTA update, and in the August 2022 update, it supported the lane center control (LCC) function. JiKe 001 took 10 months from delivery to the ability to use the L2-level ADAS function. So far, turning signal lane change and automatic parking functions are not supported, and the overall software iteration speed is not fast.
ZhiJi L7 was officially delivered in June 2022 and already supported 16 ADAS functions, including automatic parking, LCC, turning signal lane change, and avoiding large vehicles. In addition, ZhiJi Auto has demonstrated its NOA (Navigated Autonomous Driving) testing videos several times publicly, claiming that the OTA update will be available soon. The software iteration speed is relatively high in the industry.
Comparison of ADAS driving experience
The above analysis only stays at the paper level. Below, I will conduct an analysis of the activation and basic settings of ADAS by comparing the driving experience of the two models.
Comparison of activation and settings
Activating the LCC function for both ZhiJi L7 and JiKe 001 is straightforward. ZhiJi L7 can be activated by downwardly pushing the shift lever twice, and JiKe 001 can be activated by double-clicking the “Steering Wheel” icon on the left side of the steering wheel.
I conducted activation tests on different road sections, and found that when turning on a bend, the Ji Ke 001 would not immediately enter the LCC state after double-clicking the “steering wheel” icon, it only enters the ACC state, and only after a few seconds on the straight road does it enter LCC. In contrast, when using Zhi Ji L7’s assisted driving, I did not encounter such problems. As long as the instrument prompts that the LCC function can be used, whether on a bend or straight road, I can immediately enter LCC after double-clicking the shift lever.
After entering LCC, Zhi Ji L7 can control the cruise speed and following distance during cruise by using the four physical buttons on the left side of the steering wheel. The setting of Ji Ke 001 is also on the left side of the steering wheel, and it feels more technological, but it needs to activate the capacitive panel first and then control it by tapping up, down, left, and right on the panel. Due to the additional step of activating the panel, it takes some time to get used to it during use.
Cruise Ability Comparison
In my experience of using the assisted driving system, the performance during cruise is what best reflects the ability of the assisted driving system. Cruise scenarios are divided into straight road cruising, curve cruising, and congestion scenarios.
Straight Road Cruising
Whether it is Zhi Ji L7 or Ji Ke 001, they both give me a feeling of “stability” during straight road cruising. This should be attributed to the strong lane sensing ability and good chassis tuning of the two systems.
Curve Cruising
Zhi Ji L7 has good curve handling capabilities. Whether it is S-shaped curves on elevated expressways or large curvature curves on ramps, Zhi Ji L7 can stably pass through like an experienced driver, and maintains a relatively high speed (can maintain the set cruise speed on the elevated road curves, and about 40km/h on the ramp curves).
 “`
“`
When dealing with high-curvature bends such as on/off ramps or elevated connecting roads, the assisted driving system of JiKe 001 will first give a warning to the driver to take over, and then continue to attempt to control the vehicle until it exits, as shown in the following animation:

Congestion Handling
Assisted driving is extremely useful in daily commuting when encountering traffic jams, as it greatly reduces driver fatigue.
The Intelligent Driving L7 has very smooth and gentle control over the accelerator pedal and brake pedal during starting and stopping in congested scenarios, without any sudden stop/start feeling, making it extremely easy to use.
JiKe 001’s performance in congested scenarios is shown in the following animation. When the car in front leaves, JiKe 001 can rapidly accelerate to close the distance to the car in front, and when approaching quickly, it can also rapidly decelerate and stop, effectively avoiding being cut off by other vehicles.

Comparison of Handling Cut-ins
Cut-ins are a problem that all assisted driving systems cannot avoid, as there are always people rushing for time on the road, and someone will always hit the accelerator to get into your lane.
Why is handling cut-ins so difficult? This is because automatic driving systems need to achieve a delicate balance between safety and comfort, and maintaining this balance requires very high technical expertise. Prioritizing safety means that the brakes will be applied to the fullest extent, which will inevitably lead to reduced comfort and make it difficult for drivers to use the system after a few times. If comfort is prioritized, it means the system may brake too late, posing a safety hazard.
In practice, the handling of cut-ins by the Intelligent Driving L7 gives people a feeling of driving like an experienced driver.
“`
As can be seen, there were two merging events in this scenario. The first one happened at a relatively long distance. After the merging vehicle entered the target lane, the Smartcar L7 immediately switched to a new following target without obvious deceleration. Then the second vehicle attempted to merge by squeezing into the lane, instead of directly braking and giving up the merging opportunity, the Smartcar L7 chose to maintain the same speed as the vehicle ahead, playing a game of chicken to “force” the second vehicle to give up the intention of merging. Eventually, the second vehicle canceled the lane-changing intention, and the Smartcar L7 immediately chose to accelerate and caught up with the vehicle in front. The entire game handling and speed control were fluid and clever, creating a sense of control of a senior driver.
In actual user experience, the Smartcar L7’s performance was average. Occasionally, when other vehicles suddenly accelerated to cut in front, there was a slight feeling of tapping on the brakes.
SR Display Comparison
As a window of the human-computer interaction for the ADAS, the quality of SR display has a great impact on the driver’s confidence in the ADAS. An unstable display of the traffic environment is easy to give people a sense of insufficient system perception ability, which can lead to insufficient confidence of the driver in the ADAS.
The SR display of Smartcar L7 was delicate and had a high refresh rate. The traffic participants such as vehicles, bicycles and pedestrians were richly displayed, and the lane markings were displayed stably. Therefore, after the function was turned on, I could clearly understand the system’s intention, and had confidence in driving.
When the ADAS of the Smartcar L7 was switched on, the SR display had the following shown elements. The elements included the drivable area of the three lanes (the area with a light gray background in the figure), lane markings of the ego lane (real and virtual lines can be distinguished), and vehicle models (including sedans and trucks), etc.
Summary
The above is a comparison of the assisted driving functions of IM L7 and Geek-001 from the perspectives of both hardware and software and driving experience. However, from the perspective of assisted driving, the performance of IM L7 is better than that of Geek-001. I strongly recommend that the topic owner take the time to try out these two assisted driving functions in real life.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.