
Author: Huang Sha
The development of intelligent cars has been eagerly awaited for too long.
For a long time, the perception problem of “unclear and invisible” has been affecting the evolution of advanced autonomous driving. Regardless of which sensor combination is used, such as cameras, millimeter-wave radar, or ultrasonic radar, the final performance is difficult to convince people that it can serve as the “eyes” of autonomous driving cars.
The addition of LiDAR has eased the anxiety of practitioners, especially after its volume is reduced and prices are lowered. Its superior performance in terms of long-range, reachability, and accuracy has been demonstrated in mass-produced cars, and it has become the “first year” of getting on board in 2021.
However, LiDAR is still not perfect, especially due to its limited vertical field of view, only about 25 degrees, which still has a lot of blind spots for recognizing nearby low objects.
Even for ADAS, “partially blind” is the same as “completely blind” when it comes to driving behavior on the road.
Therefore, blind-spot LiDAR has emerged.
On November 7th, Velodyne, which has been in the field of LiDAR for 8 years, released the all-solid-state blind-spot LiDAR RS-LiDAR-E1 (referred to as E1 below) at Tech Day, which is based on self-developed chips and achieved higher performance from FOV, ranging to refresh rate, becoming another revolutionary product launched after the long-range LiDAR M1, and opening a new era of full-scale mass production of LiDAR cars.
“M1+E1” provides a complete vehicle-level LiDAR perception solution from ADAS to L4. The product layout of “long and short range” completely covers three key scenarios: high-speed, urban area, and parking.
At this point, intelligent cars finally have “omnipotent perception.”
The arrival of E1 is just in time.
In 2022, Tesla FSD is widely used overseas, but it is still hesitant to open in the Chinese market, which is obviously due to the insufficient perception of the camera solution in more complex Chinese traffic conditions.
Taking the most typical urban road intersection turn as an example, it is very easy to encounter sudden appearances of e-scooters, children, pets, and other dynamic objects running in front of the car at this point. Moreover, protruding curbstones, temporarily placed cones, and other static objects are also common here. The traditional cameras or long-range lidars used in ADAS are mainly used for forward perception, but there is a blind spot for detecting low and short objects on the side, which can cause significant safety risks.

In urban areas, there are also extreme mergers that occur unexpectantly. When the forward-looking lidar or fisheye camera detects it, the close proximity between the merging vehicle and the host vehicle has already happened. In this case, small collision can happen, and serious accidents like turning over can occur.

The merging and lane-changing of vehicles is a widely occurring scenario in travel scenes. The blind spot of the rearview mirror is also another major safety hazard during our driving.
Certainly, to prevent the driving threat brought by the blind spot of the rearview mirror, how to minimize the dead angle of the rearview mirror, expand the driving field of view of the rearview mirror, and see clearer and farther has become an industry problem that needs to be solved urgently.
Therefore, intelligent vehicles need high-precision, large-angle blind spot assistance to move towards higher-level autonomous driving. This cannot be achieved by cameras and other sensors. Undoubtedly, blind spot assistance lidar is the best choice.
At present, various lidar manufacturers have released different blind spot assistance plans. Dr. Qiu Chunxin, the founder and CEO of TUS, further proposed at the press conference that to truly do well in “blind spot assistance”, the lidar’s horizontal FOV should be wide enough, vertical FOV should be wide enough, refresh frame rate should be high enough, and ranging distance should be far enough.
That’s how TUS designs E1.
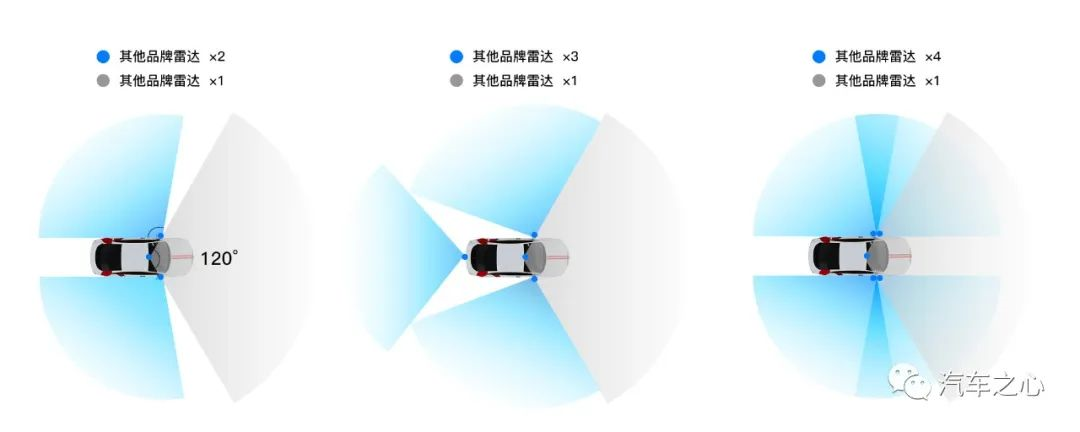
(1) Horizontal FOV is 120°
E1’s horizontal FOV is 120°. Based on the current mainstream forward-looking lidar’s horizontal FOV of 120°, only two E1s are needed to achieve seamless stitching of 360° horizontal field of view.And there will be false positives and false negatives when using a blind spot LiDAR with FOV less than 120°, even if the same number of LiDARs are deployed.
To avoid false positives and false negatives, additional LiDARs need to be installed on both sides, which means the number of blind spot LiDARs will increase from 2 to 4, and the cost will double.
For example, if a blind spot LiDAR with FOV less than 120° is installed on each side, combined with the main LiDAR with FOV of 120°, there will still be a blind spot angle on each side, which precisely spans the perception blank space between the main LiDAR and the blind spot LiDAR. As a result, the self-driving system will identify the vehicle as two separate objects.
At this point, the blind spot LiDAR not only fails to function as a “blind spot compensator,” but also misleads the intelligent vehicle.
Similarly, due to the existence of blind spots in the field of view fusion of the main LiDAR and the blind spot LiDAR, in the overtaking scenario, when the car quickly passes the truck on the left, the self-driving system may mistake the truck for oncoming traffic.
In the U-turn process, the disadvantage of blind spot LiDAR with FOV less than 120° is also very obvious. In the blind spot angle, it is easy to miss the opposite lane traffic that merges into the lane.
The worst-case scenario is when small objects such as children and riders appear directly in the blind spot angle, they will not be recognized at all, which can easily cause safety accidents.
It can be seen that if the horizontal FOV of the blind spot LiDAR cannot reach the ability to cover 180° of the main LiDAR and the blind spot LiDAR on the same side, then installing a blind spot LiDAR is not better than not installing one at all, and may even be a “negative” operation, because “partial compensation is the same as no compensation.”
(2) Vertical FOV of 90°
The vertical FOV is also crucial in order for the car to “see” everything from small traffic cones to objects as tall as a person during driving and parking to determine the passable range.For example, when parking in a tight space with other vehicles or obstacles such as walls on both sides, precise positioning is required to avoid scraping the surrounding objects.

A lidar with precise ranging ability can help solve the parking problem, but it requires high requirements for the vertical FOV. This is because during the process of parking in a narrow parking space, low obstacles, upright wall pillars, and moving people all may become blind spots of perception, causing certain collision risks. Only when the vertical FOV is large enough can the car “see” the surroundings and correspondingly adjust the steering wheel for smooth parking.
The driving environment can be compared to parking. For example, when turning left or right, cars often encounter two-wheeled vehicles or running pedestrians who suddenly enter from behind, which is actually another test of the car’s ability to identify obstacles in “narrow spaces.”
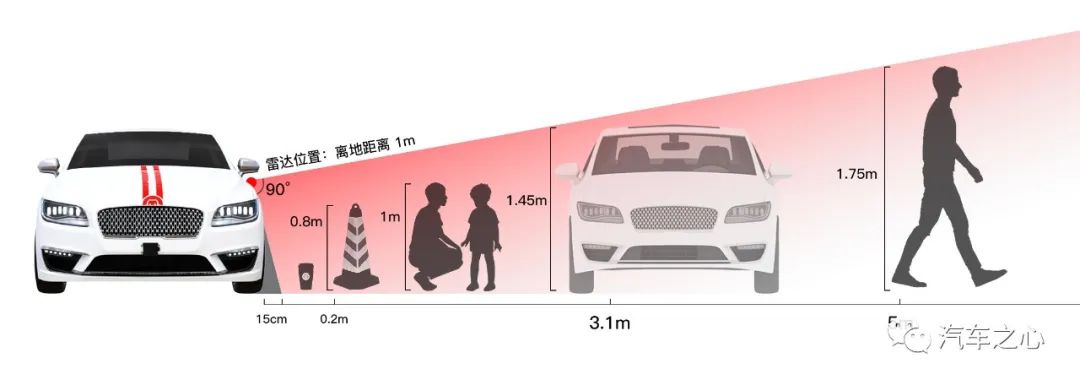
If the vertical FOV of the lidar is less than 90°, for example, with an 80° vertical FOV, and the lidar is installed 1m above the ground, in order to cover as much of the small objects as possible and avoid cars running over children, pets, cats, and dogs, the ground blind area must be reduced to 15cm. At this time, the view above the lidar is easily lost horizontally, meaning that when a car passes by laterally, the lidar cannot identify the vehicle, causing an accident.
Similarly, to ensure the view above the lidar horizontally, it would be impossible to capture the entire point cloud of nearby targets. In other words, if the vertical FOV of the lidar is insufficient, it will be trapped in a “dilemma” and cannot protect both children, pets, and adults at the same time.
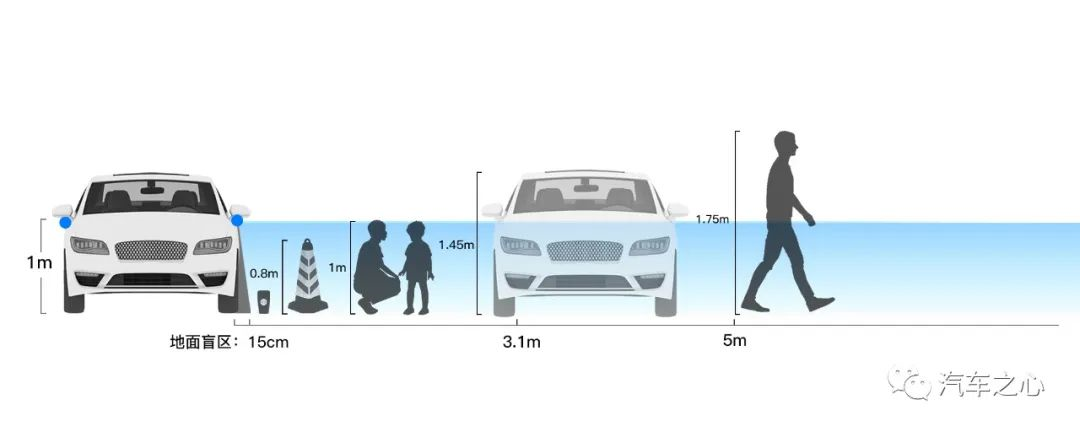
In contrast, E1 does not need to worry about this. Its vertical FOV is designed as 90°, covering the ground and side view.When E1 is deployed on both sides of the vehicle, a 90° vertical FOV can be positioned as close as possible to the lower edge of the vehicle’s visual field, compressing the blind area of the perceived area to 15cm, while retaining an upwards angle of more than 8°, thus completely detecting the entire appearance of the vehicles passing by both sides, ensuring that the perception algorithm detects it effectively.
Dr. Qiu Chunxin explained that E1 can display a complete point cloud of a small car up to 3m away and an adult up to 5m away.
(3) Ultra-high frame rate of 25Hz
In a dynamic perception environment, the refresh rate and ranging of the LiDAR are very important, as it helps the vehicle to anticipate traffic behavior in advance and leave enough time to develop safety response plans for later stages.
Imagine a scenario in which a car is driving at high speed on a city road, and suddenly a small electric moped appears at a bend in the road, with a very uncertain trajectory. If it is not recognized and braked in time, there is a high probability of a traffic tragedy.
Supplemental blanking LiDARs can indeed achieve recognition, but whether it is recognized before or after the accident, it’s another story. After all, perception without the refresh rate is no different from “playing hooliganism”.
E1 supports ultra-high refresh rates of more than 25Hz that are comparable to cameras and superior to millimeter wave radars. It can perceive the target position within 40ms and capture the target’s speed and direction more quickly, and increase the detection rate of small objects by the perception algorithms.
From this perspective, E1’s performance of more than 10-20Hz surpasses that of M1 and is superior to the 10Hz supplemental blanking LiDAR in the industry. It can brake 3m earlier when driving at 36km/h, effectively improving the safety of intelligent driving.
E1’s high refresh rate can also be used to play a role in lane change and traffic jam situations by quickly grasping the dynamics of the vehicles around.
(4) Range of 30m@10% reflectivity
The ranging ability is also an important indicator to measure the quality of the LiDAR. Although the supplemental blanking LiDAR does not need to compare with the front-view LiDAR with a range of up to 200m, the greater ranging ability undoubtedly provides more time for vehicle flow prediction and emergency response.
E1 can achieve 30m@10% and a maximum range of more than 100m, which is especially important in scenarios such as unprotected left turn, merging into traffic, and lane change.If a LiDAR can only achieve 20m@10% detection range, it will be difficult for vehicles to detect lateral targets, and the response time of the system is not enough, making it vulnerable to scratches or collisions.
With a ranging capability of 30m@10%, E1 can detect targets in advance to brake or avoid accidents, compared to 20m@10% detection range. Moreover, a 30m detection range can fully detect transverse oncoming vehicles outside of 6 lanes, effectively covering the crossroads of 12 lanes, which is suitable for most urban roads in China.
Considering all the parameters, E1 is undoubtedly a revolutionary product following M1 launched by SVauto.
(5) Optimal 360° LiDAR Perception Scheme
When E1 and M1 are combined, a set of 360° non-blind zone vehicle-grade LiDAR scheme is right in front of us. M1 is responsible for long distance and wide range detection, while E1 is responsible for filling the blind spots, and their LiDAR perception ability can fully handle the various functional needs and corner cases in urban driving, highway driving, and intelligent parking.
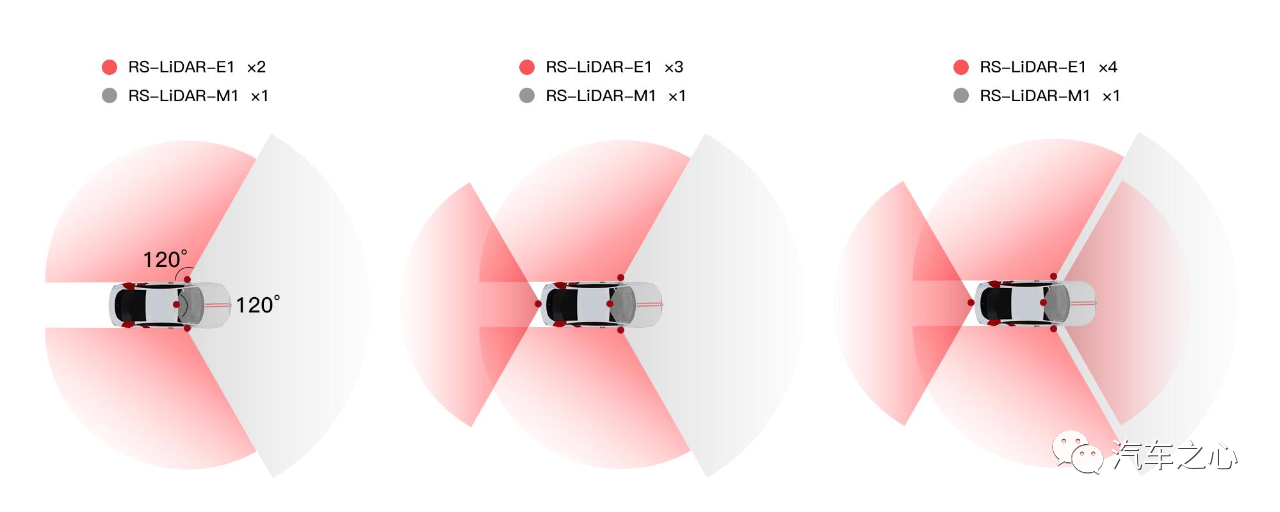
The combination advantages of M1 and E1 are not only reflected in the perception ability, but also in the cost. The two LiDARs with horizontal FoV of 120° can achieve the optimal number of combinations and an ultimate LiDAR deployment solution. Moreover, since fewer LiDARs are used in the optimal scheme, it is not only easier for deployment scheme design, but also reduces the production cost of LiDAR installation and fusion calibration on the automotive production line.
When both LiDARs are supplied by the same supplier, it greatly reduces the communication cost of perception system development for car makers’ project development coordination. For over ten car makers already using the M series product, E1 is undoubtedly the optimal choice.Based on the well-equipped long-distance main radar M1, Speedtent has launched a high-performance compensation radar E1, providing a mature automotive-grade lidar perception solution for the autonomous driving industry.
Chipization, Pure Solid State: Lidar that Can Fit in Your Pocket
As known to all, the performance of mechanical lidars is often proportional to their size.
For a lidar to achieve higher resolution, it must increase the number of lines, which also means that it needs to stack more components in the vertical direction, resulting in a bulky appearance of the lidar. So, how big is this powerful E1?
(1) E1: Half the size of a mobile phone
Dr. Qiu Chunxin sold a mystery at the press conference, stating that E1 was on-site, and let the audience guess where it was.
When everyone was confused, he casually took out an object the size of a hard disk from his pocket.

“Yes, this is E1. Its size is less than half of a mobile phone, and its thickness is only equivalent to two iPhone 13s stacked together,” said Dr. Qiu, triggering cheers.
In fact, this is thanks to Speedtent’s excellent architectural design for E1.
(2) Self-developed chip
E1 is equipped with the first self-developed chip for the full solid-state lidar platform from Speedtent, and a two-dimensional electronic scanning strategy, which integrates the three core chips of transmission, reception, and signal processing.
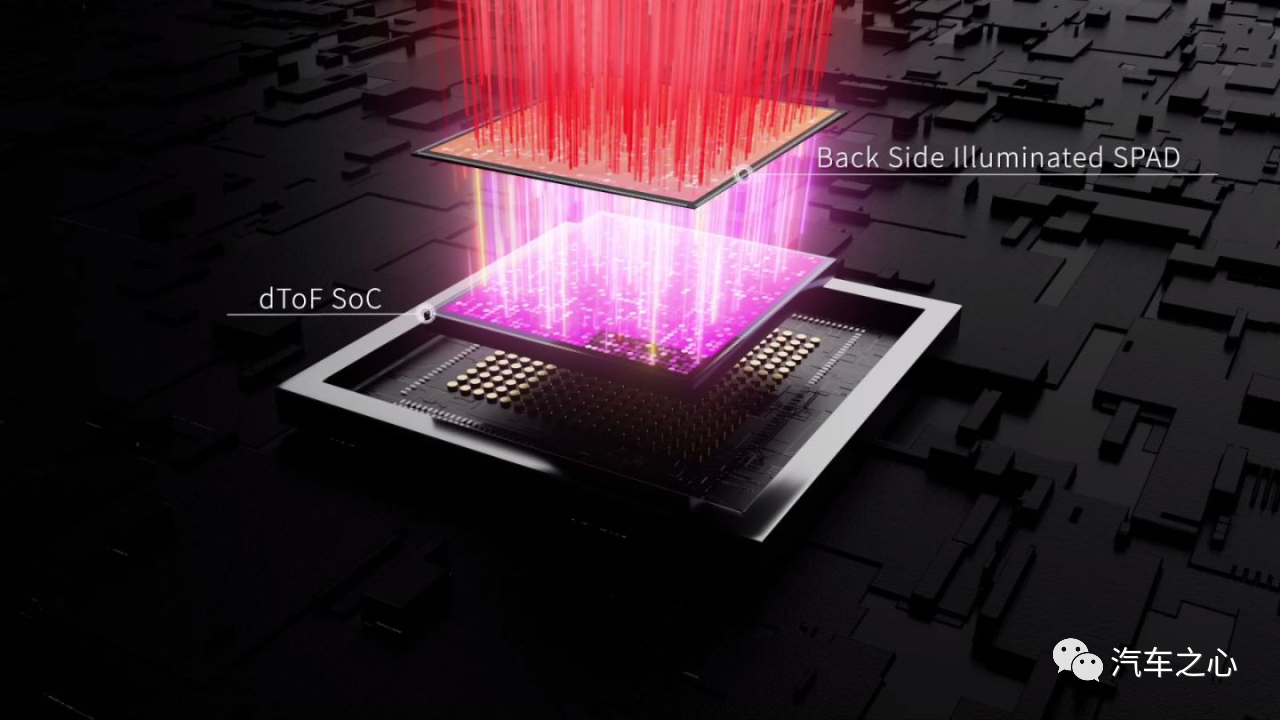
Specifically, E1’s receiving end uses advanced 3D stacking technology to integrate SPAD arrays and high-performance SoC into one chip, greatly simplifying the system link and enabling direct processing and generating of point clouds.
At the transmission end, E1 adopts a two-dimensional addressable surface array VCSEL technology, which supports flexible scanning modes and significantly improves energy utilization.
Based on the chip-scale all-solid-state architecture, E1 can achieve an ultra-thin body design, enabling automakers to easily integrate it and conveniently install it on the rear fender, door, or front of the car.
(3) Chipization Brings High Reliability and Low Cost
In addition to greatly reducing the volume, chipization brings two other advantages that are more valued by car companies: high reliability and low cost.
The former is self-explanatory. As there are no moving parts inside, the lifespan and reliability of E1, as a supplementary blind-spot lidar, are greatly enhanced.
On the cost side, as mentioned earlier, E1 is significantly simplified in circuit design and the reduction of the number of components leads to a decrease in material costs. Furthermore, chipization reduces the number of intermediate steps in the production process, resulting in high automation and further reduction of processing costs.
Finally, due to the combination of only two E1 with the main lidar, 360° perception can be achieved, which makes the overall perception solution delivered by STJCH economical.
Small size, low cost, and good performance are exactly what car companies need.
It should be noted that car companies have long suffered from a lack of side-facing sensors. Cameras, millimeter-wave radars and other omni-directional sensors have the disadvantages of low perception accuracy and weak perception ability, while the main lidar has a very limited vertical field of view. Even if multiple ones are installed around the vehicle without considering economic costs, it cannot fully utilize its advantages.
All these difficulties and numerous “lessons learned” from autonomous driving accidents have made it difficult for car companies to upgrade from ADAS to L4.
The timely appearance of supplementary blind-spot lidar solves the problem of performance, but it also adds cost. If the unit price is too high, it will also discourage car companies from mass-producing it.
This requires supplementary blind-spot lidar manufacturers to go through the road of main lidar -“self-imposed squeeze,” realizing the ultimate performance with extreme cost-effectiveness. STJCH has apparently achieved this goal.
Dr. Qiu Chunxin said that the comprehensive cost of supplementary blind-spot lidar on an intelligent car, i.e., the unit price of the lidar multiplied by the number used on a car, cannot be higher than the cost of a main lidar.
Previously, the batch delivery price of M1 had been revealed to be between $500 and $1,000. According to this calculation, after E1 is mass-produced, the price may fall to between $250 and $500, and it may even catch up with the price of millimeter-wave radar in the future.
Behind the Mature Solution, A Mature System Driven by Economies of Scale
After all the information is densely output, there is only one suspense left for E1: when will it SOP?
Dr. Qiu Chunxin’s answer is simple and direct: the second half of 2023. This means that E1 only needs less than a year from its release to mass production.## Comparison with M1
In comparison, M1 was first released in 2017 and achieved its first SOP for a target customer in June 2021.
Compared with other LiDAR manufacturers, such as Velodyne LiDAR, SureStar Jiuzhou, etc., Strobeck also has advanced progress. How did E1 achieve this speed?
(1) Capability in Car Regulations Testing Verification
The first priority is to carry out sufficient verification.
In 2020, Strobeck established a leading professional vehicle-mounted LiDAR laboratory in the industry, which can simulate and test LiDAR in all environmental applications with the support of more than 200 sets of testing equipment. It can independently conduct more than 120 tests.
It is worth mentioning that this is also the only Strobeck vehicle-mounted LiDAR professional laboratory that has obtained CNAS certification in the industry.
Thanks to a large number of targeted orders, M1 has experienced repeated coups from more than a dozen different automobile companies’ testing standards systems, and quickly became a mature and reliable product that meets the vehicle standards.
In the past two years, M1 has completed over 36,000 hours of high-temperature endurance testing, over 24,000 hours of high-temperature and high-humidity testing, over 21,000 hours of cyclic temperature shock testing, and over 40,000 hours of independent component testing and other vehicle-level reliability testing items, making it the best in the industry.
In the massive testing and iteration, Strobeck has become the first technology company to solve the product quality problems of high-bundle LiDAR window heating and glue aging and MEMS vibration mirror shock resistance. It has also completed AEC-Q10X certification for scanning devices for the first time in the industry.
According to the head of RoboSense Laboratory, Strobeck will have 11 models completed with vehicle-level reliability verification and enter the SOP mass production stage by the end of 2022.
Delivery of LiDAR not only requires high quality but also sufficient manufacturing planning to ensure a good supply for automobile companies.
If sufficient verification is from 0 to 1, then sufficient production preparation is from 1 to 100.
(2) Large-Scale Production CapabilityIn March 2021, RoboSense established the first automotive grade solid-state LiDAR production line in China. At the press conference, RoboSense also announced the establishment of a joint venture with Luxshare Precision under the name Luxsense. Luxshare Chairman Ms. Wang Laichun, who rarely attends public events, and Luxshare Vice President and Board Member of Lijing Innovation Technology Mr. Meng Yan, along with RoboSense co-founders Dr. Mark Qiu and Mr. RoboSense co-founder and CEO Dr. Chao Qiu, jointly unveiled the Luxsense brand.
Ms. Wang Laichun said at the event:
“In the field of advanced applications in the automotive industry, the LiDAR industry is one of the few in China that can achieve a leading position globally. Luxshare is very willing to cooperate with RoboSense to promote the further development of the industry. Looking at the current ecosystem, we have even more possibilities in the future.”
According to reports, RoboSense’s intelligent manufacturing cluster investment in Phase I exceeds RMB 1 billion, with a factory area of over 55,000 square meters and nearly 20 automated production lines built. It has also independently developed highly intelligent production software, achieving the top efficiency of “producing one LiDAR unit every 12 seconds”, which has realized the million-level production capacity guarantee of the “Shenzhen-Dongguan-Guangzhou” tripartite area.
This means that RoboSense can not only respond quickly to the rapidly expanding market demand, but also ensure the rapid landing of research and development results and core technologies. From R & D to testing, and then to manufacturing, it can be seen that RoboSense is fully laid out and its integrated, large-scale production system is established.
Meanwhile, the larger blueprints are gradually unfolding. RoboSense has received over 50 fixed-point orders from various luxury carmakers, and its industrial capital partners have made their first appearance.As of now, Speed x Sight has publicly announced dozens of automotive companies and autonomous driving companies as customers:
-
Automotive companies: Lucid, BAIC, Lotus, XPeng, SAIC IM, Great Wall, Zeekr, Lynk & Co., GAC Aion, BYD, FAW Hongqi, Chery, Lingpai, Dongfeng, WM Motor;
-
Autonomous driving: Pony.ai, Unity Drive, Momenta, Winzo Technology, Zhijue Technology, Ziguang Technology, etc.
As of this year, Speed x Sight’s M series products have won orders for more than 50 models of top automotive companies worldwide.
By the end of this year, there will be 11 vehicle models from Speed x Sight entering SOP.
At the event, industry capital partners of RoboSense (Speed x Sight) made their first collective appearance, including Cainiao Network under Alibaba, BAIC Group, BYD Group, Desay SV, GAC Group, Hubei Xiaomi Yangtze River Industry Fund, Geely Holding Group, SAIC Group, Hong Kong Luxshare Precision Industry Co., Ltd, Yutong Group, etc.
From customers to industry investment, they can all be regarded as the most luxurious circle of friends in the history of LIDAR.
“Long-range + short-range” LIDAR product layout, Speed x Sight remains the leader
The intelligent transformation of the automotive industry has been magnificent, and LIDAR manufacturers are undoubtedly among the most prominent stars.
From the mechanical LIDAR used on Robotaxi in the early days, to the half-solid-state LIDAR for achieving the automotive-grade and cost reduction, and to the recently released full-scene perception blind-spot supplemented LIDAR, the participants explore the ultimate to endow intelligent vehicles with stronger “eyes.”
As an industry veteran who has been entrenched for 8 years, Speed x Sight continues to play the role of leader.
This time, Speed x Sight’s latest blind-spot supplemented LIDAR E1 and long-range LIDAR M1 have formed a mature 360° LIDAR hardware solution for the first time. This means that intelligent vehicles have opened up their vision completely without any blind spots.
This means that the hardware layer paves the way for intelligent driving from ADAS to L4 upgrade, and the OEMs can continue to iterate the software capabilities in the Speed x Sight “M1+E1” combined hardware solution, eventually stepping towards L4 autonomous driving.
This is a brand new page of intelligent cars, and we are witnesses to it.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.