Author: Liu Zhe
Before the large-scale promotion of L3 autonomous driving, the AVP function can serve as a relatively safer scenario to verify the iterative autonomous driving algorithms of various companies.
Introduction
On June 22, 2022, a NIO ET7 test car fell from a parking building, causing a tragic accident with one death and one injury, adding another negative talk about the safety performance of autonomous driving. Tesla, XPeng, and other leaders in autonomous driving have also experienced “accidents” in their proudest fields. This makes ordinary users worry: Is it a safe choice to fully hand over the driving authority of the vehicle to a “robot” when driving at high speeds?
This is exactly why the NIO ET7 test car mentioned at the beginning was tested in a parking building. As a low-speed limited scenario, the vehicle speed is low, there are few pedestrians, and the possibility of serious traffic accidents is greatly reduced, but its commercial value is not low at all. “Valet parking” as a mature business that has been in existence for over a hundred years can create a sustainable and stable cash flow, and is a very good window for the introduction of autonomous driving technology into real traffic.
Therefore, it is of great value to study the technical development and commercial ability of the AVP (Automated Valet Parking) function before realizing the comprehensive commercialization of autonomous driving of vehicles. Starting from the existing AVP products, we can understand the specific implementation of the AVP function, and then analyze its cost and technical difficulties, and finally make judgments on its commercial expectations and the promotion of “L3” level autonomous driving related functions.
Current Performance of AVP
The product logic of AVP is very simple: After arriving at the destination, the user leaves the vehicle and issues an instruction for automatic valet parking, and the vehicle automatically drives into the parking lot and looks for a parking space. When the user needs to use the vehicle, they can then remotely summon the vehicle, which will automatically drive from the parking space to the user.
However, according to the level of intelligence, the functions of AVP can generally be divided into the following categories: Automated Valet Parking Assist (APA), Remote Parking Assist (RPA), Self-learning Parking (HAVP), and Autonomous Valet Parking (AVP).
Automated Valet Parking Assist (APA) requires the passenger to enter the parking lot by themselves. After the vehicle perceives the parking space, it can steer the wheel by itself and park in the space. The driver needs to stay in the car during the process.
Remote Parking Assist (RPA) is similar to automated valet parking assist, except that during the parking process, the vehicle owner can get out of the car and let the vehicle park itself. This function is more useful in narrow parking spaces or spaces with obstacles nearby, making it easier for the vehicle owner to get in and out of the car.## Autonomous Valet Parking Comparison
Compared with the previous two generations, the autonomous valet parking (AVP) system has made great progress. Drivers can now leave the car before entering the parking lot and the vehicle will park itself in the designated spot. However, its limitations are still obvious. Firstly, the parking spots are fixed, and secondly, the route needs to be learned in advance. If the parking lot is changed, the AVP system cannot be used.
Autonomous valet parking (AVP) is the most desirable state, allowing drivers to find parking spots and plan routes on their own, and to adapt to different parking lots. It also enables reverse calling, where the vehicle automatically leaves the parking spot and drives to the owner.

Currently, Tesla, XPeng, Jihoo (Huawei), and WmAuto (Baidu) and other major car manufacturers are offering AVP services. However, each manufacturer has different definitions of AVP and different implementation routes.
Tesla:
Tesla was the earliest to promote AVP functionality, claiming that their vehicles will be equipped with AVP systems since 2020. However, until now, the so-called AVP on their vehicles is just an assisted automated parking assist (APA) and remote parking assist (RPA). It provides only the ability to automatically recognize parking spots during parking driving and automatic reverse parking functionality. When parking in an inconvenient location, the car can be remotely controlled to park in the parking spot.
However, Tesla has added a one-key summon function on top of this, allowing the electric car parked within a specific electronic fence to be remotely summoned to the owner’s location. This function has its limitations, such as being limited to parking lots on the ground with GPS signal. The summon location must also be within the confines of the electronic fence. Compared with parking scenes with varied routes and complex obstacles, a fixed route and single direction-based driving, such as a parking lot’s exit, is Tesla’s strong point in pure visual route planning.
XPeng:
When talking about domestic manufacturers that compete with Tesla, XPeng is no less. Its AVP function has reached the HAVP level, which not only supports memory of parking routes up to one kilometer long but also stores up to a hundred routes. At unmanned cruising speed, XPeng can also reach 20 kilometers per hour, which is basically no different from manual driving, reflecting excellent planning and control abilities.
However, XPeng’s HAVP currently only supports underground garages and not parking lots on the ground. In theory, there is better GPS signal and lighting on the ground, which should be more favorable for vehicle positioning and perception. Here, as an assumption, the author dares to speculate that XPeng’s HAVP function may have used a specially trained model specifically for underground parking lot scenes while building roadmaps. This may improve the recognition of underground features but comes at the cost of poor performance on the surface.
Jihoo (Huawei):# Huawei-supported BAIC Arcfox, Also a Powerful Competitor in Autonomous Valet Parking
BAIC Arcfox, supported by Huawei, is also a powerful competitor in the field of autonomous valet parking (AVP). It has achieved the same level of high-precision autonomous valet parking (HAVP), which can support long-distance autonomous valet parking on a fixed route. To a certain extent, it has truly realized the driver getting out of the car and going home while the vehicle parks itself in the designated parking space. In the specific parking operation, Arcfox has optimized its path planning algorithm. In the past, some parking spaces with winding or irregular shapes that are difficult to park for some APA functions can be recognized and parked by Arcfox.
At the same time, Arcfox’s top configuration is equipped with a LIDAR, which greatly enhances the vehicle’s spatial perception ability. This improvement is mainly reflected in the cross-layer ability of underground parking lots in the case of AVP. In the past, the AVP function mainly relied on visual and ultrasonic radar, which could not do a good job of distinguishing objects beyond the longitudinal visual distance. With the help of LIDAR, parking in the parking lot with three floors up and down becomes effortless.
Weima (Baidu)
The Weima models cooperated with Baidu first adopted the name of “fully unmanned autonomous driving” in 2021, but the main functional scene is still limited to the field of memory parking for HAVP. Judging from several of the current manufacturers, the combination of surround-view camera, ultrasonic radar, and high computing power domain controller can meet the memory parking requirement of HAVP at this stage.
What sets Weima apart from others is that they have proposed the concept of public autonomous valet parking (PAVP) in the subsequent OTA upstream. In unconventional parking areas like public parking lots, Weima can achieve automatic parking without learning. Under the premise that sensors and computing power do not have much advantage, the significant improvement of PAVP relies on the scene’s intelligence prepared in advance by commercial parking lots.
Here, public parking lot plays a vital role in parking behavior by providing high-precision maps, positioning, and road planning services. From the single-car intelligence of XPeng (Xpeng), Arcfox, to the collective intelligence of car-road-cloud cooperation, the public parking lot has been integrated into a more advanced level of AVP. In the absence of rapid optimization of technology and cost, the introduction of new forces has achieved higher-level AVP functions. In fact, Tesla also plans to do business in a similar way, collecting maps by running a large number of Teslas on the market, building high-precision maps of public parking lots. Unfortunately, this autonomous road data collection is not allowed by the government and commercial complexes.

Technical Route
From a technical perspective, the autonomous valet parking function mainly relies on perception, mapping, and planning.
In the low-level AVP function, the vehicle’s requirements mainly focus on perception. As the AVP function continues to evolve towards true autonomous driving, the requirements for mapping and planning are getting higher.
PerceptionAccording to the vehicle configuration of different manufacturers, the perception part varies. Tasks related to perception can be performed by lidar, ultrasonic radar, and cameras. In the basic reverse assistance function, ultrasonic radar is used to detect obstacles around the vehicle, which later developed into rearview cameras, allowing the driver to see the rear view image and reverse assistance lines on the car’s screen.
However, as AVP functionalities require more from perception, it is no longer just about identifying obstacles. Instead, it requires the identification of parking spaces around the vehicle and the classification of various obstacles during movement, providing a pre-condition for precise path planning. Therefore, the service provided by the perception module in AVP functionalities is mainly bird’s-eye view (BEV) and semantic feature recognition.
The BEV function has already been deployed in many high-end vehicles today. This transforms road images from the four sides of the vehicle’s panoramic camera into a bird’s-eye view centered on the vehicle through projection transformation. The traditional BEV spatial transformation method usually involves using an IPM (Inverse Perspective Mapping) function to transform the image content facing the car’s surroundings into a bird’s-eye view. This process requires calibrating the position relationship of the vehicle’s panoramic camera to determine the spatial coordinate relationship of the entire camera system.
Another important direction of perception is semantic feature recognition during the parking process, including recognition of road lane lines, ground markers, and traffic signals. For machines, the data acquired from visual images is just a combination of pixels. To recognize semantics, deep learning is applied through artificial intelligence methods utilizing abundant road data. The mainstream target recognition algorithm frameworks today are TensorFlow by Google and the YOLO series by the ultralytics team, the latter of which is more widely used in the field of autonomous driving. By using specific training datasets and customizing output methods, YOLO can adapt to most road scenes and provide semantic recognition services for vehicles, helping them determine their current driving status and make decisions.
Mapping refers to small-scale high-precision maps of parking lots in various areas. Since there is no involvement of sensitive information such as government and military, the qualification required for collecting high-precision map information of parking lots is not high, and most private enterprises can obtain it without legal risks.
A high-quality 3D high-precision map is obviously conducive to improving the effect of autonomous driving functionalities. However, mapping is a complex and lengthy process, and if single-vehicle intelligence is relied upon for mapping, a great deal of computing power and time is required to process the road data of parking lots. This is also why most automakers’ automatic valet parking functions only support up to HAVP. Because if only a single route’s data is collected, the computing power required is greatly reduced.If we want to support global mapping, we must abandon the past practice of each individual car manufacturer working alone and achieve collaboration among cars, roads, and clouds. Smart functions in cars are provided by automakers, and onboard sensors can identify nearby obstacles and execute limited road planning. Data from roads is collected collaboratively with parking lots and maintained with a certain update frequency, providing high-precision maps needed for underground navigation to offer accurate centimeter-level vehicle positioning and long-distance path planning. Major cloud computing vendors are introduced in the cloud to free vehicles from the vast amount of data storage and computing. This also benefits the maintenance and reuse of map data, and globally optimizes the entire car park AVP system.
Currently, high-precision map collection mainly uses SLAM (Simultaneous localization and mapping) algorithm, which depends on sensors for functionality and can be split into laser SLAM and vision SLAM. The way laser radar does SLAM is easier to understand: it continually sends and receives reflected laser signals, calculating the time difference between sending and receiving the laser, multiplying by the speed of light to determine the distance from nearby objects to the laser radar. With a 128-line laser radar, objects within 200 meters can be measured to cm-level accuracy. As the vehicle moves, the surrounding terrain information for the entire road can be collected.
However, the shortcomings of laser radar are also very obvious; it cannot judge the semantic information of surrounding terrain with any accuracy. Laser radar can only distinguish between different materials’ objects by their reflection rate, such as ground and wall or glass and plastic. But laser radar does not have the ability of color recognition; therefore, high-precision maps built from laser radar scanning heavily rely on image information provided by surround-view cameras.
At the same time, existing depth cameras and binocular cameras can already obtain good depth information. Even single-lens cameras can obtain depth information through epipolar matching algorithms. Therefore, companies like Tesla prefer to use massive low-cost camera image data directly to carry out high-precision map collection in most parking lots.
Planning
The ability of path planning is required to increase as AVP’s ability level gradually increases, from APA to HAVP to PAVP. Vehicles need to progress from short-distance trajectory planning to point-to-point path planning while adding real-time obstacle avoidance and dynamic planning functionality during the driving process.
Short-distance local trajectory planning is based on the grid map, which assigns different grid values to obstacles and passable spaces around the vehicle. The size of a grid is generally the basic step length of the vehicle’s movement. Thus, the vehicle’s displacement can be transformed into the movement between different grids, and computers can use mathematical methods to calculate the vehicle’s running trajectory. Although the demand for grid models is quite high on computing power and storage when applying them to the entire map, it is acceptable with the effective enforcement of Moore’s Law and the mass production of downstream and upstream industries.## Pathfinding Algorithms on Grid Maps
The pathfinding algorithm running on grid maps, starting from Dijkstra’s algorithm, gradually evolved into many more efficient and better performing algorithms, such as A* and D*. The classic Dijkstra’s algorithm is a breadth-first algorithm that calculates the cost of reaching each adjacent point from the starting point, and selects the point with the minimum cost that can be reached from all the points that can be reached, adding it to the starting point set. The points in this set are then used to calculate the cost of reaching the remaining adjacent points, and the point with the minimum cost is added to the starting point set. The process is repeated until the minimum cost of reaching all points is calculated.
Dijkstra’s algorithm is a typical greedy algorithm that can only consider the adjacent points around the current point during the cost calculation process, and cannot achieve global optimality. Therefore, A* algorithm was developed to optimize it. A* algorithm is a “heuristic” algorithm that pre-defines the direction of the end point, guides the direction of algorithm expansion, reduces the traversal of points that are unlikely to be passed through, and improves the efficiency of running. D* algorithm adds dynamic detection functionality, even if the vehicle has not yet determined the final target point while starting the AVP function. The road information collected during the operation can be added to the path planning graph, guiding the vehicle to park in the parking space along the relatively shortest path.
Cost Analysis
For intelligent vehicles, AVP is not an independent working module, but shares a set of hardware systems with functions such as AEB (emergency braking) and ACC (adaptive cruise control). Currently, various manufacturers are vigorously promoting AVP services to pave the way for high-level “L3 level” autonomous driving functions through hardware upgrades. Under the premise of sufficient perception ability and computing power, the vehicle manufacturer can deploy other autonomous driving functions through OTA upgrades.
Therefore, after understanding the specific functions and technical routes of AVP, we can analyze the specific costs required for vehicles to achieve fully autonomous parking and even city road auxiliary driving.
Firstly, there are sensor devices on the vehicle, mainly including LiDAR, surround cameras, ultrasonic radar, and satellite positioning devices. Here is a summary.
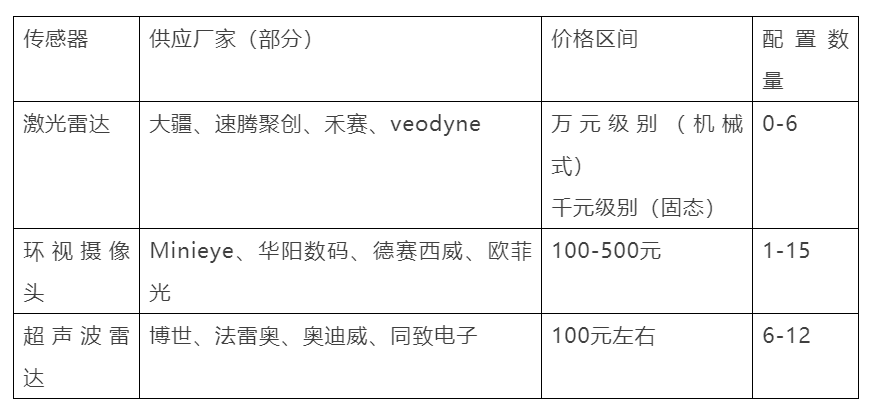
From the table, we can see that the cost of onboard sensors is mainly on LiDAR. But in addition to these well-known basic sensors, there are many hidden hardware costs to consider inside the vehicle.
Integrated NavigationCombination navigation refers to the combination system composed of inertial navigation system (IMU) and satellite positioning system GPS, which provides high-precision vehicle positioning. Currently, there are many excellent suppliers in China, such as Guangzhou DaoYuan, Qianxun Positioning, Zhong Hai Da, etc. However, the cost of combination navigation varies greatly, with cheaper positioning modules available on Taobao for 100 yuan, and the cost of expensive combination navigation equipment having no upper limit. According to different prices, it can provide positioning services ranging from meter-level to human spaceflight-level. Engineering-grade combination navigation generally costs around ten thousand yuan, and the positioning accuracy can reach centimeter-level. In order to quickly locate, it is also necessary to purchase satellite differential services provided by local service providers, with a general fee standard of one account and one thousand yuan per year.
Most combination navigations have very high operational requirements for positioning services. To achieve good positioning accuracy, there must be open airspace. In urban canyons and the top areas of underground parking lots, combination navigation cannot provide services. Therefore, in the current field of automatic valet parking, combination navigation is only responsible for providing a simple operating design area (ODD) range to help vehicles determine whether relevant autonomous driving functions can be enabled.
Automotive Chips
The price of the chips used in autonomous driving functions is usually in the range of several hundred to several thousand yuan, but this does not mean that the cost of purchasing computing power by automakers is only several hundred to several thousand yuan. Because most chip manufacturers will package their chips into their own computing platforms for sale, data transmission protocols, tool platforms, and functional architectures are all developed around the chips.
Choosing a specific chip means choosing their solution. Taking the currently most popular NVIDIA Orin chip as an example, the development board price has reached 80,000 yuan, although it may become cheaper after mass production, it will still not be too cheap. The cost of chips in the Tesla Model 3’s vehicle bill of materials (BOM) is nearly $1,516, accounting for 6% of the vehicle cost of $25,000. According to Intel CEO Pat Gelsinger’s prediction, by 2030, chips will account for more than 20% of the high-end automotive material cost (BOM).
The current mainstream chip platforms are shown in the following table:

MapsHigh-precision map is an indispensable part of the high-level autonomous driving puzzle. A real AVP cannot be without a high-precision map of the parking lot, and a real city-level autonomous driving (“Level 3”) also cannot be without a high-precision map of the entire city. Unlike the conventional maps we usually use, the high-precision map referred to here generally refers to the city’s three-dimensional point cloud map, which collects all the terrain feature points around all the roads in a city and can keep the map updated. The vehicle can use the laser radar or camera carried on the vehicle to obtain its accurate position information by reversing the SLAM algorithm while driving. With the support of the high-precision map, the vehicle-borne sensors can choose products with lower accuracy and cheaper prices, which helps the cost control of the host factory.
At present, the price of the map industry is still not fixed because the economic cost and time cost of mapping are both very high. However, once it can be widely applied, it will become a basic platform for automatic revenue creation, similar to highways and telecommunication networks. The companies that can provide high-precision map services are mainly top-tier companies, including Baidu, Tencent, Alibaba, Didi, Tesla, General Motors, and Google. Some new mainforce factories and autonomous driving start-ups also have their own high-precision map services, but the scope is limited to a few main roads in individual cities.

Vehicle to Everything (V2X)
When discussing the automatic valet parking function, an important related party that cannot be ignored is the intelligent parking lot on the parking lot side. Because mapping in a small-scale commercial field is not technically or policy-wise difficult, various commercial parking lots can become high-precision map suppliers for AVP functions. At the same time, existing shopping malls need to be intelligently renovated, road beacons need to be added, parking lot cloud services need to be established, and all parking spaces need to be digitized. Regarding the specific requirements of the site intelligent, “TCSAE 156-2020 Technical Requirements for Autonomous Valet Parking System” divides the intelligent parking into five levels.
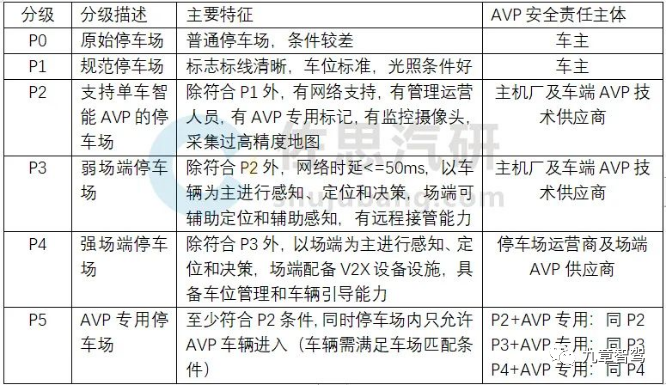
The cost of this part may not need to be borne by the host factory for the time being, but in the future, if the car owner wants to enjoy AVP services, they will need to pay the parking lot fees.
The so-called site intelligence, in more professional terms in the autonomous driving industry, is actually V2X (connected vehicle). This is a very localized application scenario in China because governments in other countries often lack sufficient authority and capital to create a completely new transportation format. However, for China’s intelligent driving industry, intelligent roads, intelligent street lights, intelligent road signs + vehicle-mounted OBU devices constitute a complete vehicle-to-everything (V2X) system.Translate the Markdown Chinese text below into English Markdown text in a professional way, preserving the HTML tags inside the Markdown and outputting only the corrected and improved parts without explanations:
By sending driving instructions through roadside, vehicles can assist in route planning, control speed, automate lane changing, and achieve a series of autonomous driving functions. The simplest vehicular cooperative equipment is the ETC installed in our cars, which, with a price of hundreds of yuan, provides high-speed automatic toll payment function. However, to achieve real V2X communication, an OBU device costing two to three million yuan is required, which suddenly increases the cost of V2X. At the same time, the high cost of intelligent road construction, with costs reaching billions of yuan, has slowed down the progress of intelligent end greatly.

AVP Improvements
Although the technology for automatic valet parking (AVP) has emerged, and can meet most of the functions of memory parking, and even complete the full AVP function of automatic route searching, parking, and departure with field support, there is still a considerable gap from full commercialization.
Firstly, the cost of individual vehicles is too high, and most users will not simply buy laser radar-related accessories for the sake of AVP functions. Secondly, the degree of vehicle intelligence is not enough, advanced AVP functions rely too much on field intelligence, and parking lots that can provide smart parking services are currently very rare.
Therefore, there is still plenty of room for improvement in the existing AVP functional direction, and many people in the industry are exploring this direction.
Pure Vision AVP
The use of laser radar has always been a route divergence in the field of autonomous driving. Laser radar can provide high positioning accuracy, but it has become the biggest burden on the cost of the whole vehicle. Therefore, there have always been people in the industry working on purely visual autonomous driving solutions. Dr. Qin Tong of the Hong Kong University of Science and Technology proposed the pure vision AVP functional mode in 2021. This scheme not only greatly reduces the amount of map data collected but also greatly improves the accuracy of road recognition. It can also reduce the frequency of map updates, reducing individual vehicle costs in multiple ways.
This method first needs to use panoramic cameras to extract 360-degree images around the vehicle, and then project the panoramic images onto the ground centered on the vehicle using inverse perspective mapping (IPM) to generate the BEV (Birds-Eye View) around the vehicle. The U-Net neural network is then used to extract data from the generated BEV images, with a focus on training for fixed terrain identification such as lane lines, parking spaces, traffic signs, and columns. Unfixed terrain such as cars, pedestrians, and irregular obstacles are ignored. Finally, the collected data is restored to the three-dimensional world, resulting in a high-precision parking lot map with semantic information.
 The localization process of the AVP-SLAM algorithm is similar to traditional visual SLAM methods, but the accuracy is far beyond the scope of visual SLAM. Compared with the classic visual SLAM algorithm framework ORB-SLAM2, the positioning accuracy of the AVP-SLAM algorithm is within 5 cm, and the size of the map is only one-tenth of the former.
The localization process of the AVP-SLAM algorithm is similar to traditional visual SLAM methods, but the accuracy is far beyond the scope of visual SLAM. Compared with the classic visual SLAM algorithm framework ORB-SLAM2, the positioning accuracy of the AVP-SLAM algorithm is within 5 cm, and the size of the map is only one-tenth of the former.
The biggest advantage of this method is the ability to maintain high-precision maps for a long time without frequent updates. Compared with the commonly used traditional ORB-SLAM2 method, the relocation accuracy can still be maintained at 79.23% after mapping for one month.
The feature selection during mapping is optimized by this method, using machine learning to remove frequently changing objects and focusing on more constant traffic signs. This reduces the storage and computing requirements and improves the relocation accuracy of the vehicle navigation process. In the long run, the positioning accuracy can always be maintained at a relatively high and stable level, which dramatically reduces the cost of maintaining parking lot maps.
Following Musk’s “first principles,” the AVP-SLAM mapping and positioning method is closer to the human way of thinking when parking a car: look at the signs in the underground parking lot, identify the ground lane lines, and finally park into the pre-drawn parking space. The environment of the underground parking lot is structurally single, with many repeated textures. Traditional LiDAR scanning would result in a large amount of redundant information being collected, which would not increase efficiency.
For most ambitious automakers, AVP is an important intermediate transition stage for promoting “L3 level” autonomous driving in cities. Thus, AVP features, up to the level of HAVP, require automatic parking space searching in underground parking lots. Currently, automatic tracing parking is inadequate to meet the requirements.
In the previous introduction of path planning, it was mentioned that breadth-first algorithms represented by Dijkstra’s algorithm have the unified characteristic of finding a minimum cost pass path by weighting the path. However, when facing large underground parking lots with long distances and high complexity, this kind of breadth-first algorithm needs to traverse each possible path, which has a high demand for computing power. Moreover, the parking lot is not a static environment, with various vehicles and pedestrians entering and leaving, which affects the weight between different roads.The current development direction of path planning in the autonomous driving industry is transitioning from supervised learning to reinforcement learning. The supervised learning method involves the automatic driving system inputting positioning and perception information, and the human driver performing operations and labeling to learn human operating habits. However, blindly imitating human conventional strategies in unfamiliar scenarios can lead to a series of errors. Therefore, various manufacturers are studying how to use reinforcement learning algorithms for self-training of trajectory planning models, which can effectively improve training efficiency. The final result has a higher coincidence rate with the real trajectory of human driving, and the speed of yaw regression is faster.
Conclusion
From a technical perspective, a complete and strictly defined autonomous valet parking system should meet the requirements of L4 level autonomous driving: dynamic path planning, road semantic information recognition, large-scale high-precision maps, and fully unmanned. The sensor configuration of the entire vehicle also fully supports city and highway driving, and the breakthrough of technological singularity is imminent. However, the L3 level of autonomous driving has yet to be put into use, and there are many issues that need to be solved outside of technology.
Up to now, many car companies that have deployed advanced driver assistance functions have been affected by related accidents, such as Tesla’s collision with a truck and the small Xpeng customer’s fatal accident. It seems that once traffic accidents are associated with autonomous driving functions, they will automatically become magnified.

The worries of ordinary users are also understandable. When driving a vehicle, humans are the main body of the driving behavior, and after an accident, each independent human bears responsibility. We can say that every person is unique, so accidents that occur on other people may not necessarily happen to me, but the deployment of driving assistance functions on vehicles is uniformly developed and deployed, so users have reason to suspect that the same accident will also happen to themselves.
Therefore, before the large-scale promotion of L3 level autonomous driving functions, the AVP’s functional scenario can be used as a relatively safe scene to verify the autonomous driving algorithm of each company. Compared with city roads, the parking scene has the characteristics of low speed, few pedestrians, and standardized scenes, but its underlying logic and L3 level autonomous driving requirements are the same. The architecture mode of perception-mapping-positioning-planning-control can also be fully verified in the AVP functional scenario.
The acceptance of autonomous driving functions by traditional car users is a gradual process. Just as humans were afraid of trains a hundred years ago, modern humans also have fearful thoughts when encountering technologies they do not understand. Therefore, the autonomous driving function in low-speed scenarios provides a buffer zone for us humans and technology to adapt to each other.At the beginning of the valet parking service, trust was placed in the attendants. However, the emergence of Autonomous Valet Parking (AVP) functionality has shifted this trust to various intelligent driving companies. For non-AVP users, the car park is also an excellent showcase platform: when you are looking around for a parking space, an unmanned autonomous vehicle slowly drives by and gently parks in a designated parking space in the intelligent car park, safe and convenient.
The integration of technology and users finally needs to be regulated by law. In recent years, China’s legislation on autonomous driving has been progressing rapidly. In 2021, the “TCSAE 156-2020 Technical Requirements for Autonomous Valet Parking System” was introduced to standardize the intelligent level and performance standards of AVP functionality for both the car and the parking lot. It includes four main parts: system definition, safety application scenarios, overall technical requirements, and overall testing requirements.
In July 2022, the Shenzhen Municipal Government took the lead in issuing the “Intelligent Networked Connected Vehicle Management Regulations in Shenzhen Special Economic Zone,” which clearly define the responsibilities for accidents involving L3 and L4 level autonomous driving vehicles. These vehicles must be equipped with drivers, and the drivers are responsible for any accidents that occur. If a traffic accident is caused by a quality defect in the intelligent networked connected vehicle, the driver can seek compensation from the producer or seller of the vehicle after being held liable for damages.
This regulation is conducive to the autonomous driving technology development companies to promote their technology products with confidence, without fear of being held accountable for accidents involving their products. Ordinary users now have legal grounds to claim compensation in the event of an autonomous driving accident.
What is currently missing for the large-scale promotion of AVP functionality is a successful commercial case. From a user analysis perspective, users who are willing to spend tens of thousands of dollars to upgrade to the AVP version are rich and experienced players who are proficient in parking and do not really need parking assistance. For novice drivers, they value endurance and appearance when purchasing a car, and are not interested in additional functions, such as AVP.
Therefore, the breakthrough for AVP functionality is either to be affordable enough for all novice users, just like the Automatic Emergency Braking (AEB) function, or to be more intelligent and integrated with the parking environment, making the vehicle truly driverless within the parking lot and completely replacing the hotel attendant in the business ecology.
Only by achieving extreme cost reduction and efficiency enhancement can users truly accept this new technology. Autonomous driving can then move from the laboratory to reality.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.