
Author: Banjia
In the previous four articles, we detailed the working principle of the stability functions integrated in the Electric Stability Controller (ESC) and the evolutionary trend of the ESC system in the development of intelligent chassis. When the ESC system has the ability to independently control the braking force of all four wheels, there is still a lot of room for expansion in active safety technology, such as the well-known Auto-Hold function.
Meanwhile, with the maturity and popularity of L2 level intelligent driving systems such as Adaptive Cruise Control (ACC) and Automatic Emergency Brake (AEB), the ESC system, as the execution mechanism of Advanced Driver Assistance System (ADAS), plays an important role.
This article will comb through the expansion of the ESC system in active safety technology based on the mainstream driving assistance functions that the current ESC system provides or supports.

The Mainstream Driving Assistance Functions Provided by ESC
Regardless of which ESC system is provided by any manufacturer in the current market, they all have the feature of “buy one get many”, that is, besides the basic stability control function, they also provide a series of driving assistance functions synchronously. However, many of these functions work “low-key” and are not easy for the driver to notice, so they are rarely mentioned. For example, the Electronic Brake Pre-fill (EBP) function designed to shorten the braking pressure-building time and the Brake Disc Wiping (BDW) function designed to wipe the rainwater from the brake discs. This section will only introduce the driving assistance functions provided by ESC that everyone is familiar with.
Hill-start Assist Control (HAC)
Friends who have driven a manual transmission car are more or less nervous when starting on a slope. During the brief moment when the right foot moves from the brake pedal to the accelerator pedal, the braking force disappears but the driving force has not been established yet, causing the vehicle to roll back on the slope, which not only results in a poor driving experience, but also may cause a collision with the car behind in serious situations.
 The function of HAC is to keep the hydraulic pressure in the wheel cylinders for a certain amount of time after releasing the brake pedal with the right foot, giving the driver enough time to apply the accelerator to build up driving force, making it easier for the driver to start on a slope. HAC is a very beginner-friendly function. With HAC’s assistance, the driver can reduce the use of the handbrake, reduce the risk of stalling and slipping, and it is applicable for both forward and reverse.
The function of HAC is to keep the hydraulic pressure in the wheel cylinders for a certain amount of time after releasing the brake pedal with the right foot, giving the driver enough time to apply the accelerator to build up driving force, making it easier for the driver to start on a slope. HAC is a very beginner-friendly function. With HAC’s assistance, the driver can reduce the use of the handbrake, reduce the risk of stalling and slipping, and it is applicable for both forward and reverse.
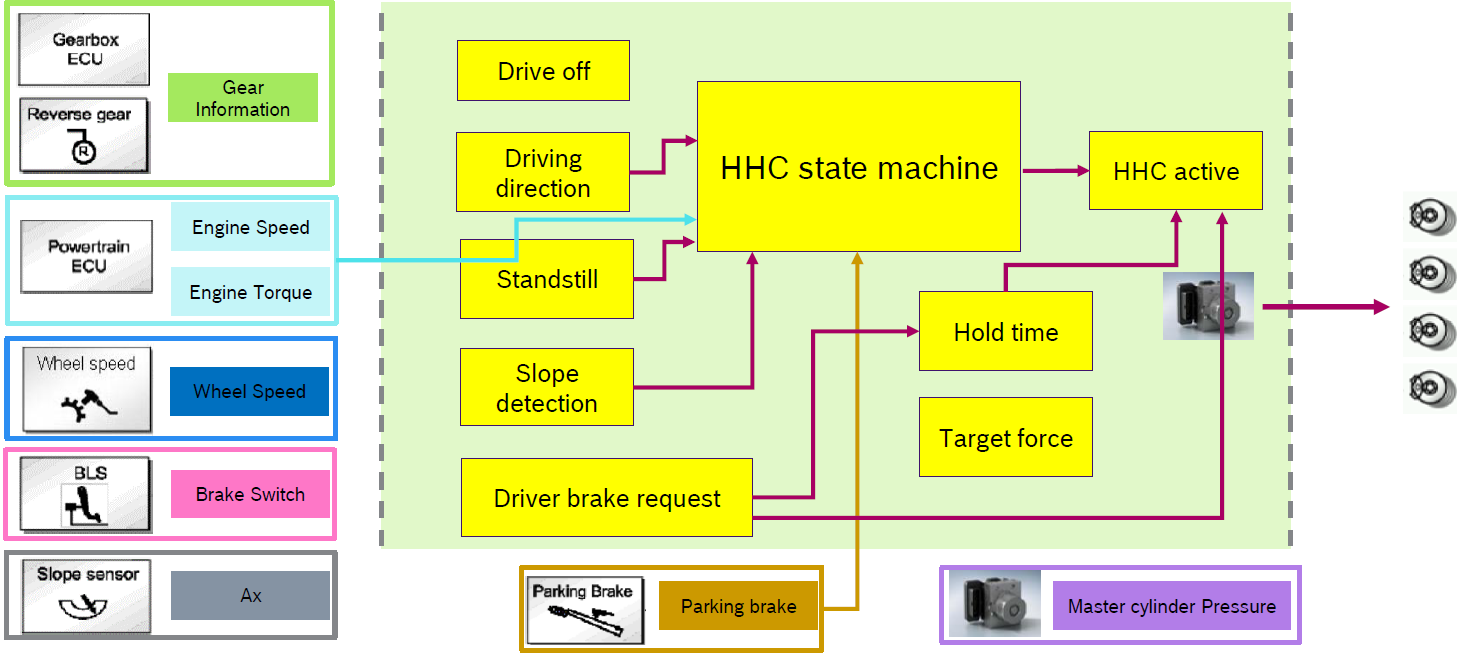
The activation of the HAC function depends on the slope judgment, which relies on the longitudinal acceleration sensor detected in the inertia sensor. In addition, to improve comfort, HAC needs to ensure that the braking force and driving force can be properly connected. As the driving force increases, the braking force needs to be gradually reduced. Therefore, in the control process of HAC, it is necessary to use the brake pedal signal and accelerator pedal signal to correctly judge the driver’s intention to start. At the same time, HAC needs to receive gear information to judge the direction of the vehicle’s start based on integrated longitudinal acceleration sensors.
When the detected slope exceeds the HAC activation threshold, the entire control process can be summarized as follows:
- The driver applies the brake pedal until the vehicle comes to a stop.
- The driver releases the brake pedal to prepare to start.
- HAC is activated, and the hydraulic control unit’s outlet valve is closed, keeping the pressure applied in the four wheel cylinders in the cylinders.
- When the driving force exceeds the threshold or the HAC activation time threshold is reached (no more than 2 seconds), the outlet valve is opened to release the braking force.
By default, HAC provides up to 2 seconds of parking time. After 2 seconds, the hydraulic pressure begins to be released. In most slope situations, the 2 seconds are enough for the driver to switch from stepping on the brake pedal to stepping on the accelerator pedal. However, in the case of very steep slopes, there may still be a short risk of sliding due to a slow buildup of driving force. Therefore, HAC also detects the accelerator pedal status. If the HAC determines that the current driving force output is not sufficient to start the vehicle on the slope, even when the driver is pressing the accelerator pedal, HAC will extend the parking time to 4 seconds, thereby improving the comfort of starting on steep slopes.
Hill Descent Control (HDC) Function Image
HDC (Hill Descent Control) Function
The HDC function is a standard feature of high-performance off-road vehicles. It can be considered as a low-speed “cruise control”, which allows the driver to smoothly pass through steep downhill sections without stepping on the brake pedal. During this process, the driver can fully focus on controlling the steering wheel without the need to control the brake pedal or accelerator pedal.
The activation of the HDC function depends on the judgment of the slope, which relies on the longitudinal acceleration sensor detected by the inertia sensor. The key points of HDC control can be summarized as follows:
- The driver activates the HDC button to open the HDC and inputs the target vehicle speed (usually not exceeding 15kph).
- If the current HDC function state is normal (such as no brake pad overheating alarm, etc.), the target braking force will be calculated through PID control, combined with the current wheel speed and target vehicle speed, and the target braking force will be converted into target pressure and sent to the hydraulic control unit to achieve cruise control.
- If the slip rate of a wheel exceeds the threshold set by ABS during this process, ABS intervenes and corrects the target pressure.
Auto Hold
Auto Hold can be said to be the most popular function provided by the ESC system, except for stability function. Currently, automatic transmissions are becoming more and more popular, greatly reducing the driver’s workload. However, due to the hydraulic characteristics of the automatic transmission, if the driver stops the vehicle by braking in D gear (such as waiting for a red light), the vehicle will crawl at a very low speed if the driver releases the brake pedal. But the waiting time for a red light is usually short, and the driver doesn’t want to pull up the electronic handbrake manually every time he stops. The purpose of the Auto Hold function is to automatically maintain the pressure in the wheel cylinder when the vehicle is stopped by the driver, so that the hydraulic braking force can keep the vehicle stationary, avoiding crawling and saving the trouble of pulling the electronic handbrake.
The working principle of Auto Hold may sound similar to the HAC, but compared to the latter, the application scenario of Auto Hold is more extensive, and the control is relatively more complex. The comparison between the two is shown in the following table.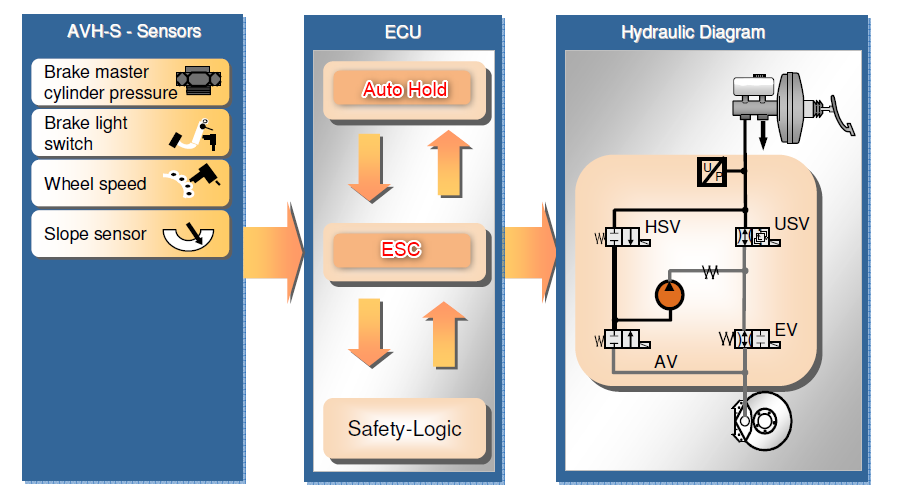
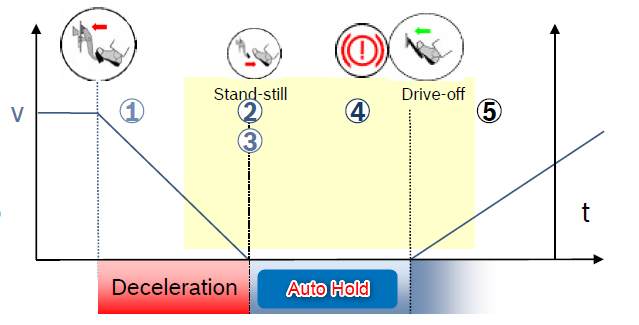
The entire control process of the Auto Hold can be summarized as follows:
① The driver presses the brake pedal until the vehicle comes to a stop.
② After the vehicle is stopped, the outflow valve of the hydraulic control unit is closed to maintain the pressure from the four-wheel cylinders in the cylinders (if the pressure is insufficient, the active pressure will be increased).
③ If the duration of the Auto Hold operation exceeds the set threshold (10 minutes), the automatic parking system EPB is actively requested to pull up the caliper while releasing hydraulic pressure.
④ If it is detected that the driver has pressed the accelerator pedal, Auto Hold will release the hydraulic pressure when the driving force exceeds a certain threshold.
Controlled Deceleration for Parking brake (CDP) Function
ESC systems currently on the market typically integrate the electronic parking brake EPB. In addition to providing a parking function when the vehicle is stopped, the EPB system needs to actively apply pressure to the electronic control hydraulic braking unit through the EPB switch to achieve a minimum deceleration of 1.5 m/s², meeting regulatory requirements. The CDP function is designed to meet this regulatory requirement.
In fact, the braking deceleration that the OEM requires for the dynamic hydraulic braking function is much greater than the regulatory requirement of 1.5 m/s². The following figure shows the target deceleration curve required by an OEM. When the driver continuously pulls up the EPB switch, the deceleration will increase with the duration of the switch being pulled up, and the maximum deceleration can reach -8 mm/s².
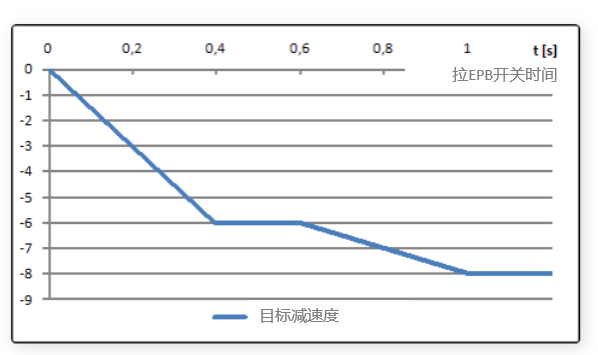
During the vehicle shaping process, when the EPB switch is pulled up by the driver, CDP will continue to provide braking deceleration until the vehicle comes to a stop. CDP can provide a maximum deceleration of up to 8 m/s² until the vehicle comes to a stop or the EPB electronic button is released. The target deceleration is achieved by CDP by controlling the hydraulic unit under the ESP system to apply braking force to the wheels. During the action of CDP, the stability functions of ABS and VDC in the vehicle should be fully available to avoid the risk of vehicle instability caused by wheel lock-up.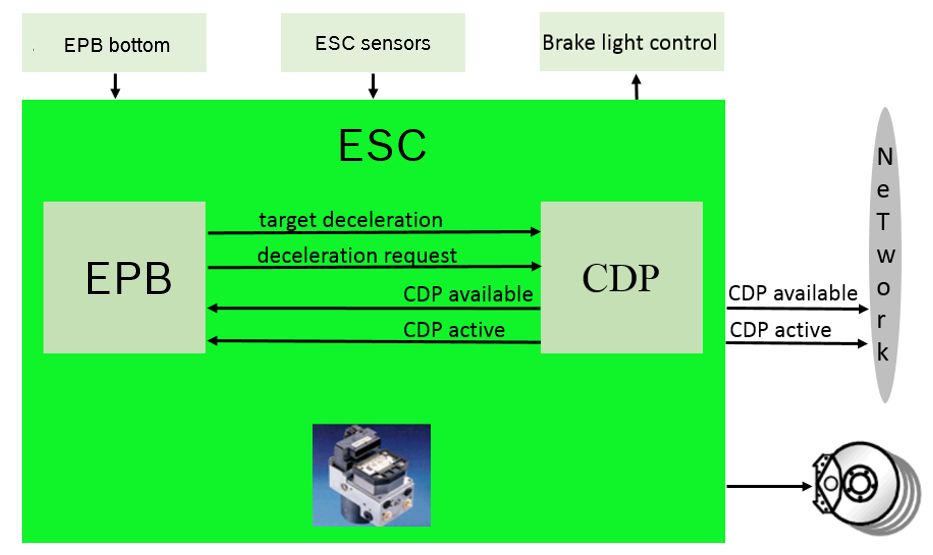
The Role of ESC in Intelligent Advanced Driver Assistance Systems
Although fully automated driving during high-speed processes has not yet been achieved in the market, some mature advanced driver assistance functions have been widely used and recognized by users, with the most typical representatives being Adaptive Cruise Control (ACC) and Automatic Emergency Brake (AEB). The following will explain the role of ESC in ACC and AEB.
ESC and ACC
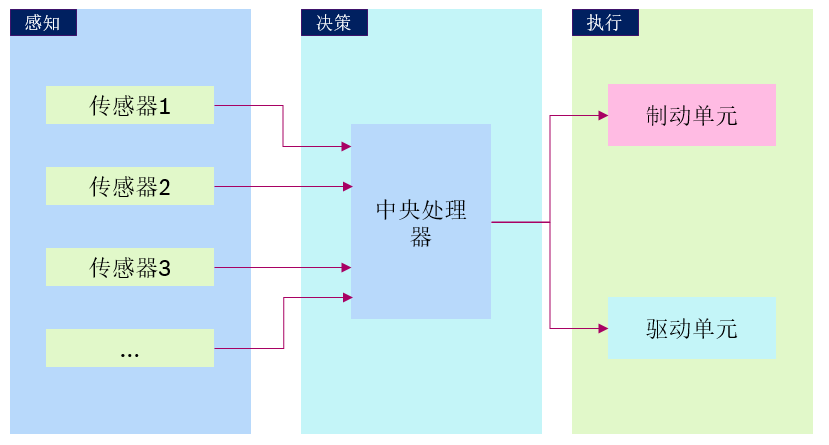
When a vehicle is equipped with ACC, the distance sensor (radar) installed at the front of the vehicle continuously scans the road ahead, while the wheel speed sensor collects the speed signal, and through coordination with the brake and drive units, the vehicle always maintains a safe distance from the preceding vehicle. When the ACC system controls the vehicle’s braking, it usually limits the deceleration rate of the braking to a level that does not affect the driver’s comfort. When a greater deceleration rate is required, the ACC control unit will issue a sound and light signal to notify the driver to take the brake operation voluntarily. When the distance between the vehicle and the preceding vehicle increases to a safe distance, the ACC control unit controls the vehicle to travel at the set speed.
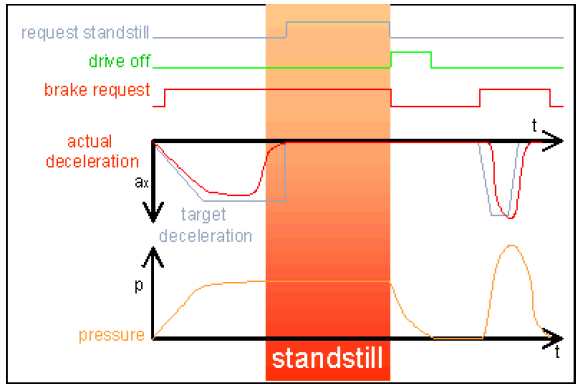
ESC, as the execution unit of the brake unit, provides the brake deceleration interface to the upper-level Advanced Driver Assistance System (ADAS). After receiving the deceleration request signal sent by ACC, ESC adjusts the wheel cylinder pressure to make the actual deceleration of the vehicle reach the target. When the vehicle approaches a stop, ACC will issue a parking request signal. ESC will keep the vehicle at a standstill. After a period of time, ACC will issue a vehicle start-up request signal. Then, ESC will release the brake pressure inside the wheel cylinder to allow the vehicle to start and leave.
Low-noise, smooth and stable vehicle deceleration control is an important aspect affecting the comfort of ACC function, which also requires ESC to make precise control. If the driver steps on the brake pedal during the deceleration control period of the ACC function, ESC will automatically calculate a target brake pressure for a smooth response to reach the maximum extent.
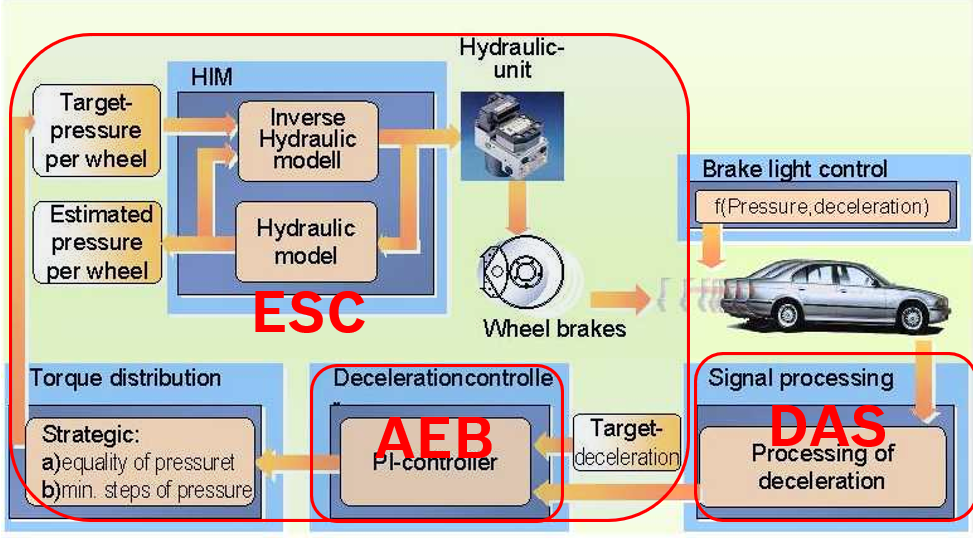
ESC and AEBThe AEB system uses radar to measure the distance between the vehicle and the preceding vehicle or obstacle. The data analysis module compares the measured distance with the warning distance and safe distance. When the distance is less than the warning distance, the system will issue an alarm. When the distance is less than the safe distance, even if the driver hasn’t stepped on the brake pedal, the AEB system will proactively control the braking system to brake the vehicle to avoid collision.
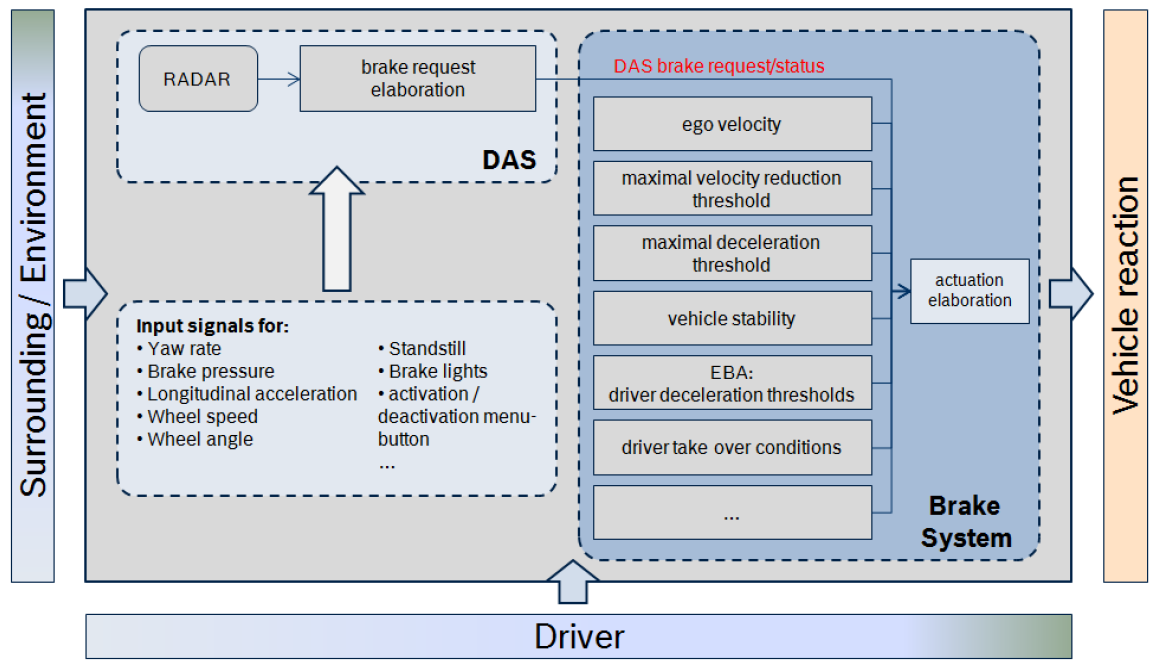
During this process, the upper-layer ADAS system monitors the driving condition and traffic status in real time. When the system detects that there is a risk of collision between the vehicle and the preceding vehicle, it triggers the AEB function and sends a deceleration request to ESC. After receiving the deceleration request from the ADAS system, ESC quickly activates the braking system to decelerate the vehicle according to the ADAS system’s request.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.