Author: SunKaopu
The big difference between new energy vehicles (referring to hybrid and pure electric vehicles, including extended range electric vehicles) and traditional vehicles is that new energy vehicles have energy recovery systems. What is energy recovery? How is it implemented? What is it related to? This article explains energy recovery in new energy vehicles in simple language.
What is energy recovery?
As we all know, there are two ways for vehicles to decelerate:
-
Through releasing the accelerator pedal and relying on the vehicle’s own resistance to coast and decelerate, which results in a longer coasting distance.
-
By applying the brakes to achieve deceleration.
The deceleration process of the vehicle is actually a process of converting the vehicle’s kinetic energy into heat energy to overcome the frictional resistance, including wind resistance, frictional resistance of the vehicle’s power transmission mechanism, frictional resistance between the tires and the ground, and the frictional resistance generated by the braking system (which accounts for the largest proportion of energy). Other parameters are fixed during the development process of the entire vehicle and are passive. However, if the energy generated by braking friction can be collected and reused to drive the vehicle, it would be of great significance to the overall vehicle energy consumption. The energy recovery system of new energy vehicles plays this role.

How is the energy recovery system of new energy vehicles implemented?
When we were studying physics, we learned that when a coil in a magnetic field is energized with alternating current, the coil will rotate in the magnetic field (electromagnetic induction). A rotating coil in a magnetic field will have a reverse current passing through it, and at the same time, it will generate a reverse resistance to prevent the coil from rotating (magnetic induction). This is the most basic principle of an electric motor. New energy vehicles utilize this principle during deceleration, using the motor to convert the vehicle’s kinetic energy into electrical energy for recovery.
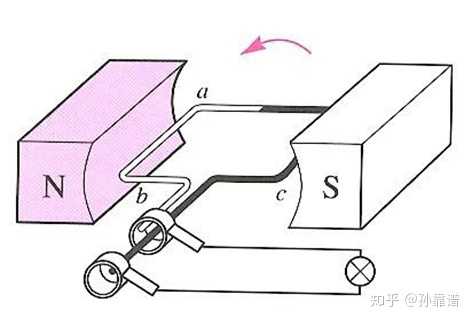
During deceleration (coasting by releasing the accelerator pedal or braking), since the motor is still coupled with the wheels of the vehicle, the rotor permanent magnet rotates at high speed under the drive of the wheels and transmission mechanism, and the lines of magnetic force are cut by the stator winding, which generates a reverse induction current in the stator winding that charges the battery. At the same time, a reverse torque is generated on the rotor, which prevents the vehicle from moving forward, achieving the deceleration of the vehicle, which is what we call magnetic induction (the actual control principle of the motor is much more complicated, and I won’t go into detail here because I’m not a professional). According to the author’s testing experience, the energy recovery rate of electric vehicles to NEDC mileage is about 15% on average, and for some better ones, it can reach about 20%.
What are the different types of energy recovery in new energy vehicles? What are the differences and what are the types?
There are two ways of energy recovery in electric vehicles, namely braking energy recovery and coasting energy recovery, which are distinguished solely by stepping on the brake pedal. Regenerative braking refers to energy recovery achieved by stepping on the brake pedal, while coasting energy recovery refers to energy recovery achieved solely by releasing the accelerator pedal.
Currently, there are two ways to achieve regenerative braking of the motor, one is called the regenerative brake system (RBS), and the other is called the cooperative regenerative brake system (CRBS). The biggest difference between the two is whether the braking pedal is decoupled from the braking actuator (RBS coupled, CRBS decoupled). In a braking scenario of an electric vehicle, one source of braking torque is mechanical braking generated by the friction pads, while the other source is provided by the motor, which generates negative torque through the transmission shaft to achieve deceleration, known as electric braking. As long as the proportion of electric braking is higher, more “magnetic electricity” can be generated and more energy can be recovered!
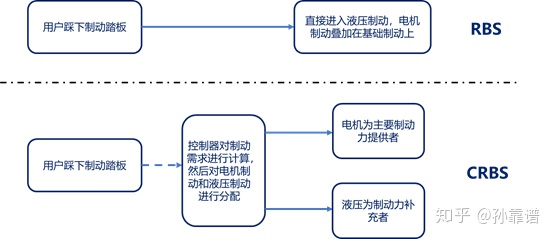
Because the braking pedal and the braking wheel cylinder are coupled in RBS, in a deceleration process, as long as the braking pedal is stepped on, the braking wheel cylinder will generate hydraulic pressure to achieve braking, with electric braking only assisting mechanical braking. Therefore, there is still some energy loss and the energy recovery rate is relatively low.
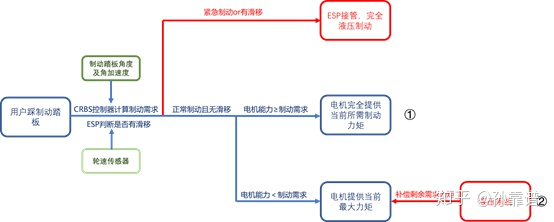
In contrast, the braking pedal and hydraulic actuator are decoupled in CRBS. After stepping on the braking pedal, the controller uses the pedal angle and angular velocity sensed by the travel sensor to infer the driver’s braking requirements, calculates the required braking force, and then uses the motor as the main torque source, with hydraulic braking compensating for insufficient braking torque. This increases the proportion of electric braking and thereby increases energy recovery.
For example:
If the electric braking capacity of the motor at the current vehicle speed is 1000N, and the calculated braking force requirement when the user steps on the brake is 800N, then the entire process is achieved solely by electric braking, as shown in Figure 1.
If the electric braking capacity of the motor at the current vehicle speed is 1000N, and the calculated braking force requirement when the user steps on the brake is 1500N, then the remaining 500N of braking force is generated by hydraulic braking, as shown in Figure 2.
In reality, CRBS’s control strategy extends far beyond the dimensions mentioned above, and is very complex, involving torque out versus vehicle speed, electric/hydraulic switching, battery charging power, and many more factors. The figure above is a simplification for easier understanding.Sliding energy recovery currently has two types: one cannot adjust deceleration by throttle opening, while the other can. In layman’s terms, the former cannot adjust energy recovery strength by releasing the throttle, while the latter can adjust energy recovery strength by releasing the throttle. Currently, most vehicles use the latter method. Some manufacturers even make it a single pedal function, eliminating creep, and most acceleration and deceleration can be completed by the accelerator pedal alone. However, this style is currently quite radical and controversial. In my experience, most electric vehicle owners still prefer strong energy recovery with adjustable recovery strength. I also prefer this style, as it provides strong driving pleasure once adapted to.
What parameters are related to energy recovery strength in new energy vehicles?
Under certain deceleration conditions:

Therefore, in order to improve the vehicle’s braking energy recovery capacity, it is mainly necessary to focus on the following points:
-
Increase the recovery torque of the motor at different speeds, that is, the recovery power (increase the boundary of regenerative braking, the greater the power, the more working conditions can be covered).
-
Reduce the vehicle’s drag (under the same deceleration demand, the smaller the vehicle’s resistance, the more recovery torque the motor needs to provide, and the more energy it can recover).
-
Improve other related parameters (such as decelerator efficiency, differential efficiency, motor efficiency, etc.)
Note: Increasing the weight of the vehicle will also allow the motor to recover more energy under a certain deceleration, but due to the increase in vehicle weight, the driving energy consumption will also increase. Therefore, it is not feasible to increase energy recovery by increasing the weight of the vehicle, but to find ways to reduce weight and energy consumption.
At the same time, as the storage component, the charging power of the current battery needs to be greater than the motor’s recovery ability to store all the energy recovered. Otherwise, the motor’s charging ability will be controlled to prevent overcharging.
The energy flow during the entire energy recovery process is shown in the diagram below, and the mechanical energy is converted into electrical energy by the motor and stored in the battery:

The above dimensions can only explain how to improve the boundary of motor energy recovery ability. In actual vehicle development, the energy recovery style will be calibrated based on vehicle driving performance and safety considerations. (For example, energy recovery corresponding time, torque establishment gradient, torque decrease rate and gradient, etc.).
Which is more energy-efficient: strong or weak sliding energy recovery?
I have been asked this question many times: which is more energy-efficient between strong and weak sliding energy recovery? My general answer is: it is most energy-efficient to just slide and stop the car at the desired position.The energy recovery is too strong, causing the vehicle to stop before reaching the designated location, and requiring acceleration again to reach the destination. The efficiency of energy conversion is low due to two rounds of energy recovery.
On the other hand, if the energy recovery is too weak, the vehicle will arrive at the designated location with speed, requiring the brakes to be applied, resulting in thermal energy loss.
Therefore, to minimize energy consumption, complete reliance on electric braking can be achieved. There will be no energy loss or inefficient conversion and thus the most energy-efficient.
Tips on energy-saving using energy recovery
When selecting a vehicle, choose one that comes with CRBS function and also has a deceleration pedal-controlled sliding energy recovery feature.
When using the vehicle, apply sliding energy recovery as much as possible especially when following at a long distance. Adjust the deceleration intensity by stepping on the accelerator pedal to control the following distance. Use the brakes to slow down when following at a short distance.
The principle is to use sliding energy recovery as much as possible. Only when the deceleration demand cannot be achieved by sliding energy recovery should braking energy recovery be used. After all, sliding energy recovery is 100% recovery without external forces while braking energy recovery generates low voltage power consumption when CRBS is working and there is hydraulic braking intervention that leads to energy loss under certain working conditions.
The above is my personal understanding of energy recovery for new energy vehicles. The intention is to present my thoughts in simple language for easy comprehension. Feedback and corrections are welcome from experts in this field due to my limited knowledge.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.