The Performance of Intelligent Driving Functions in Specific Scenarios
The wave of intelligent vehicle technology has come, and the competition in intelligent driving is increasingly fierce. Traditional automakers, Tier1 suppliers, new car-making forces, internet giants, and innovative technology companies all want a share in the process of intelligentization.
So, beyond the surface marketing and the filtering of capital bubbles, how good is the current level of intelligent driving in terms of product performance and technical ability? What are the characteristics of mainstream products? Recently, we selected several mainstream intelligent driving products that are already on the market and conducted benchmark testing based on their product performance and technical ability.
The objects of this evaluation are the Tesla Model 3, NIO ES8, and XPeng P7 vehicles. The software for all of them has been upgraded to versions released after May 2021.
Our evaluation is divided into two dimensions: (1) functional performance in specific scenarios; and (2) human-machine interaction effects.
At the end of this article, the configuration and technical evolution roadmap for several mainstream products will be provided as supplementary information for this evaluation.
Scenario Scope and Classification
For this evaluation, we directly benchmarked the highest-level intelligent driving functions of the three vehicles: Model 3’s NOA function, ES8’s NOP function, and P7’s NGP function.
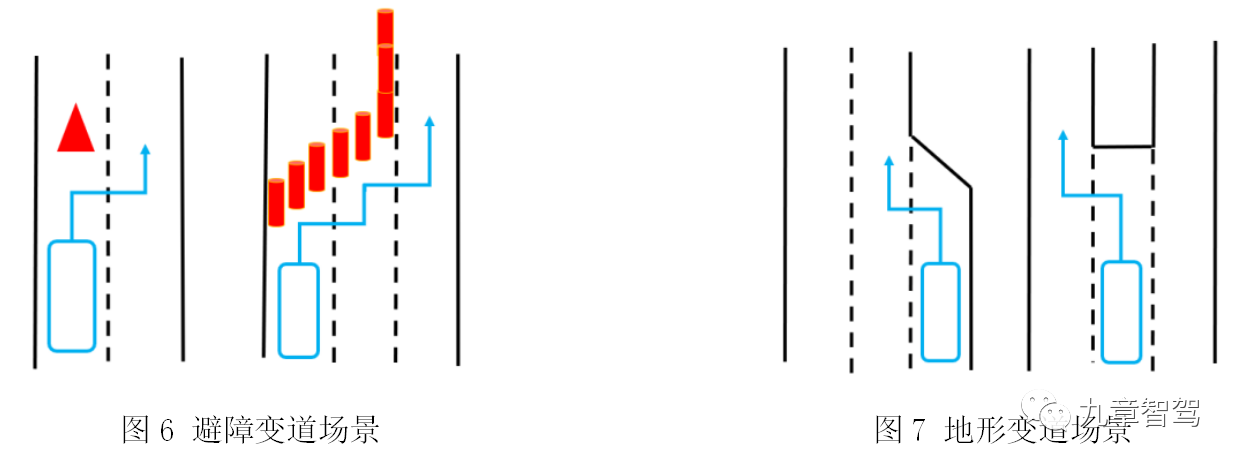
In terms of scenarios, there are mainly two categories: cruising in the current lane and automatic lane changing. These two categories can be further subdivided into various specific scenarios as shown in Table 1 and Figures 1 through 7.# Function Performance in Cruise Scenario
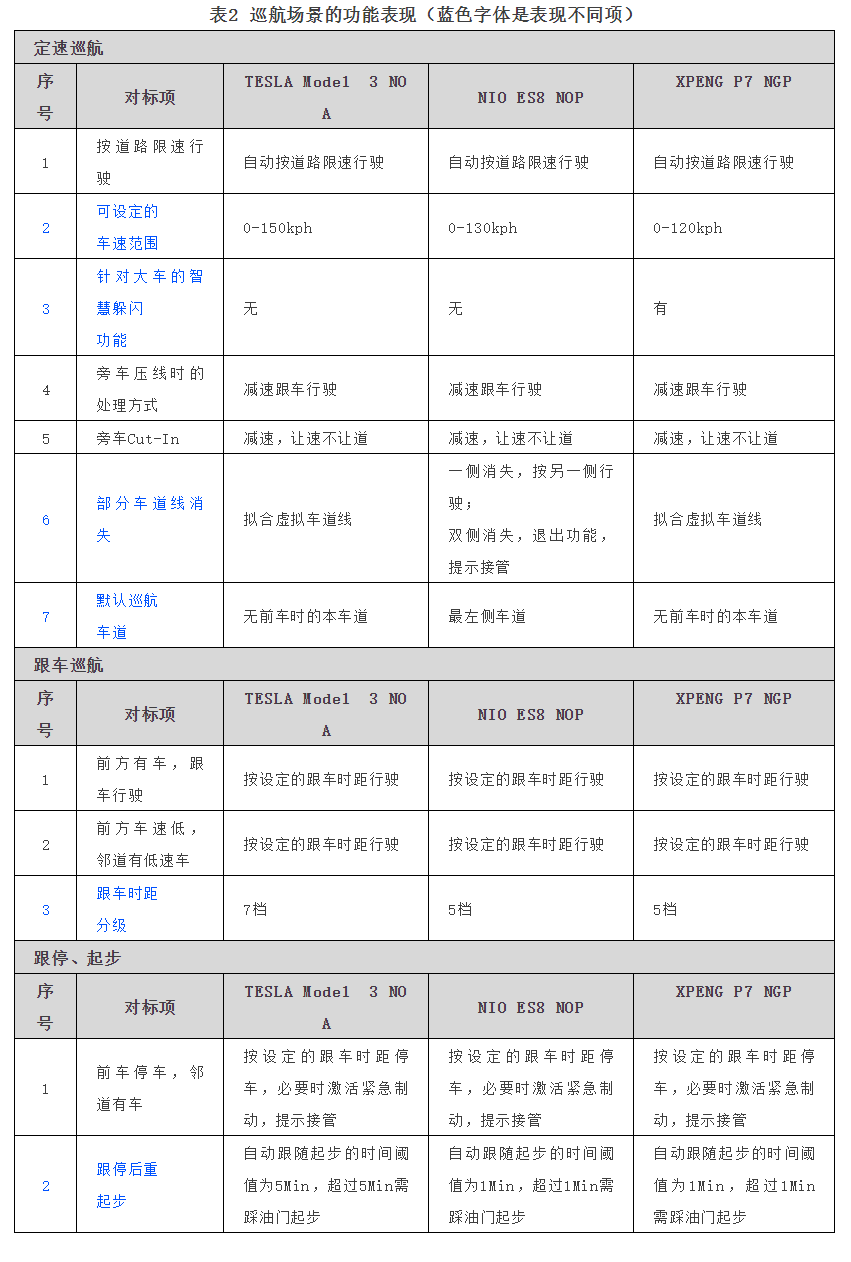
As shown in Table 2, the strategies and function performance of the three products are similar in the cruise scenario, all able to automatically drive according to the road speed limit, follow at the set distance when there is a car ahead, and slow down but not allow lane invasion when a car moves into the lane.
However, there are still some differences in certain scenarios. For example, the adjustable speed range: Model 3 is more aggressive, activating NOA function within 150 kph, while ES8 and P7 better comply with domestic regulations.
In the case of disappearing lane lines, Model 3 and P7 can fit a stretch of lane line with better algorithms to ensure normal function, while ES8 does not have this capability.
Regarding scenarios where there are large vehicles in the adjacent lane, P7 has implemented a smart dodge function, providing passengers with greater sense of safety; the time threshold for restarting after following is also different, with Model 3 being more aggressive, while ES8 and P7 are relatively conservative.
Function Performance in Lane Changing Scenario
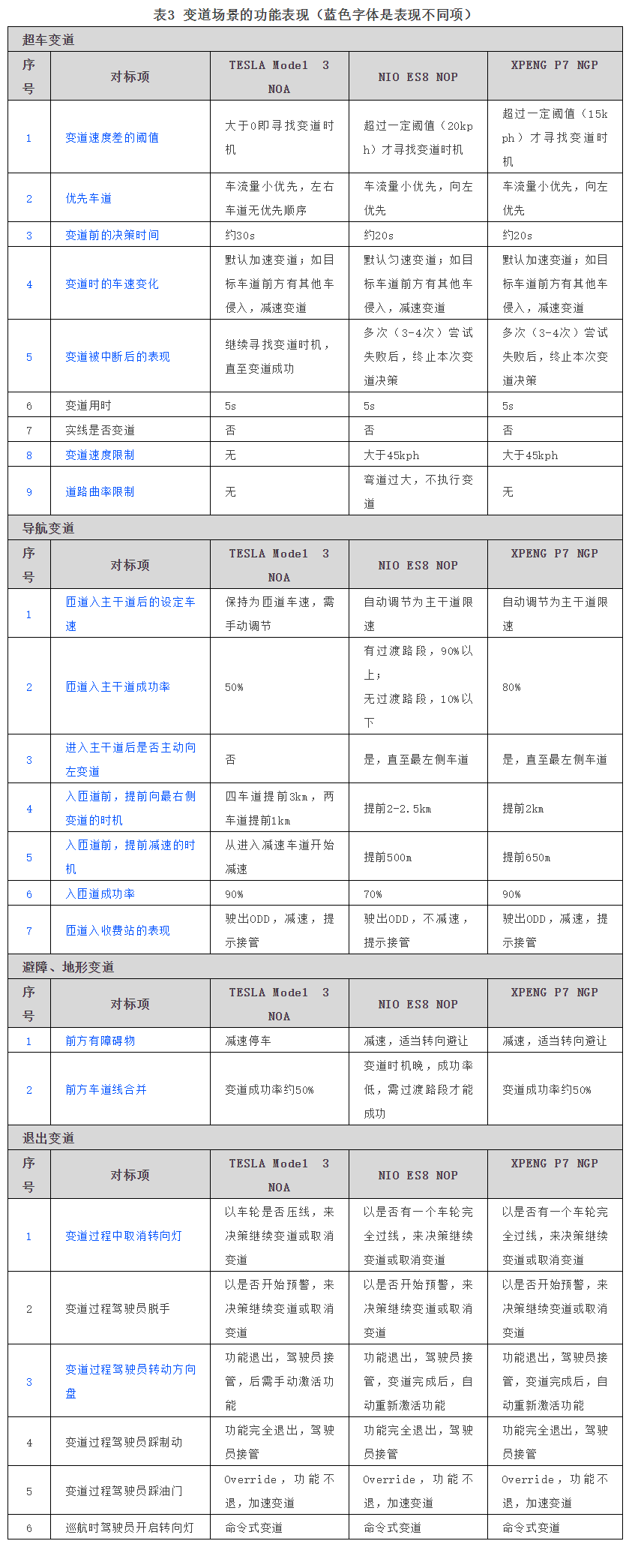
In the automatic lane changing scenario, there are significant differences in the function performance of the three products, reflecting differences in their performance and driving styles.
In the scenario of overtaking and lane changing, when the speed is suppressed, Model 3 looks for an opportunity to overtake and lane change, while ES8 and P7 will patiently wait and only actively change lanes when the speed is sufficiently suppressed.
In terms of lane selection strategy, all three choose the lane with less traffic reasonably, but Model 3 does not have a priority for left and right lanes, while ES8 and P7 comply with Chinese driving rules, prioritizing left lane changing.
Model 3 is very confident in its lane changing decision, once decided, it will definitely find an opportunity to complete the action, while ES8 and P7 will terminate the lane changing decision after multiple failures.
When navigating and changing lanes, Model 3 cannot automatically adjust the speed after merging onto the main road, requiring manual adjustment by the driver, resulting in poor user experience.
After merging onto the main road, Model 3 does not change lane to the left lane, while ES8 and P7 automatically change to the leftmost lane, neither of which is the optimal strategy. We believe that selecting the left second lane automatically for four-lane roads, and the leftmost lane for two-lane and three-lane roads, better conforms to domestic conditions.
 Due to the lack of integrated high-precision maps, Model 3 has a lower success rate in merging onto the main road, while the perception ability of ES8 is weak and needs a transitional section to improve the success rate, P7 has achieved an 80% success rate in merging onto the main road with its good perception ability and high-precision maps.
Due to the lack of integrated high-precision maps, Model 3 has a lower success rate in merging onto the main road, while the perception ability of ES8 is weak and needs a transitional section to improve the success rate, P7 has achieved an 80% success rate in merging onto the main road with its good perception ability and high-precision maps.
When driving out of the main road and entering the ramp, Model 3 and P7 both show a high success rate, while ES8’s success rate is lower due to its weak perception ability.
Before entering the ramp, all three products have actions of changing lanes and slowing down in advance, but the timing of these actions varies and is also related to the traffic flow at that time.
When driving out of ODD and entering the toll station, ES8 does not slow down, resulting in a poor user experience.
For scenarios where there are obstacles on the road, all three products prioritize slowing down, but Model 3 directly slows down to a stop, while ES8 and P7 will make appropriate steering maneuvers to avoid them, resulting in a better user experience.
In the case of lane merging, the success rates of all three are not high, which is suspected to be limited by the current perception capabilities, and further improvements are expected.
If there is driver intervention during the lane changing process, the processing methods of the three are mostly the same, except for the operation of stepping on the accelerator pedal by the driver. The system will exit or pause the function. The difference lies in the timing of the exit and whether the system will automatically resume control.
Function Performance Summary
Model 3 has powerful perception capabilities, a radical style, and lower safety, and has encountered dangerous situations multiple times during testing, requiring multiple manual interventions. Meanwhile, Tesla relies too much on visual perception, with a low degree of integration with navigation and maps, leading to situations where wrong routes are taken.
ES8 is limited by hardware, with weak perception abilities and a more conservative style, but relatively high safety, albeit sacrificing passage efficiency. NIO’s scene perception and navigation information integration are of high degree, without missing crucial scenarios such as ramp entrances involving global path planning.
P7’s perception capabilities are at the level of Tesla, while its style is more conservative, more suitable for Chinese road scenarios, and balances passage efficiency and safety. Xpeng’s scene perception incorporates high-precision maps, resulting in more accurate perception.
Current mainstream products still have room for improvement, such as toll station scenarios, which cannot currently be automatically driven out of; it may be possible to consider setting different autonomous driving modes to meet the user experience of different driving style consumers, and so on.
Human-Computer Interaction Effects
For the human-computer interaction effects of the three products, we also conducted a review based on different application scenarios.
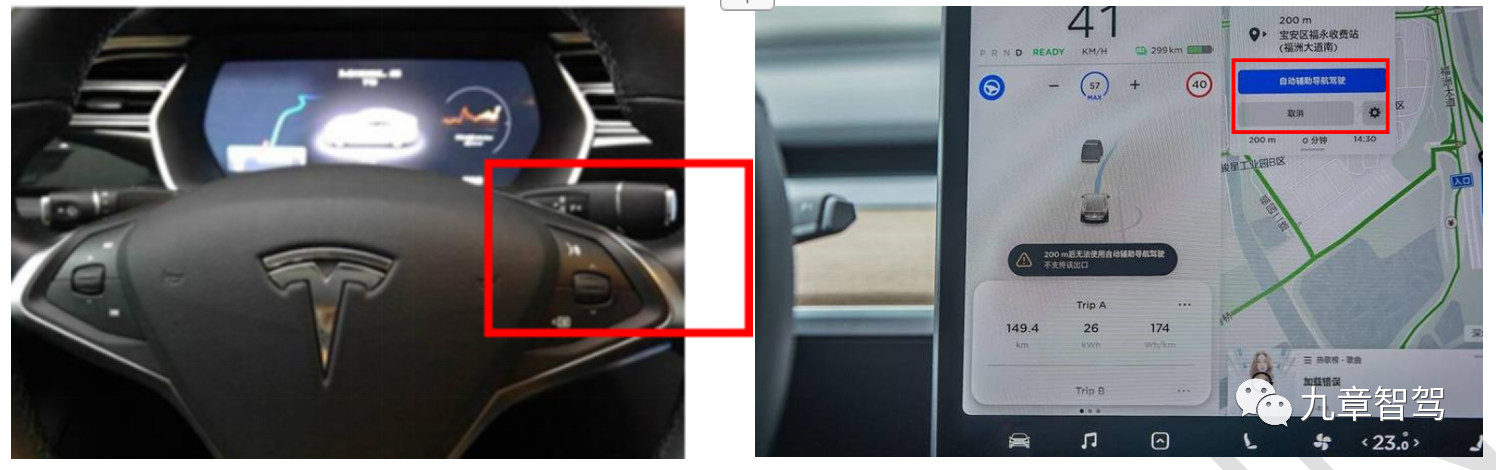
Operation modes for function activation and deactivationThe three products have the same way of enabling their functions, which is controlled by the soft switch in the car’s infotainment system. However, the activation methods are different for each product.
Model 3 completely overturns the traditional way of operating a car and uses a lever to operate; ES8 completely retains the traditional way of operating a car and uses buttons to operate; P7 takes a compromise solution and uses both levers and buttons to control different modules.
 )
)


The three products have the same way of exiting their functions, which is the same as their activation method.
In the case of driver intervention, the handling of the driver pressing the brake pedal is the same. The function will exit and the vehicle will be handed over to the driver. In the handling of the driver turning the steering wheel, ES8 only pauses the function and decides whether to resume the function based on the driver’s turning time, while Model 3 and P7 directly exit the function.
All three products use the steering torque detection method to detect whether the driver’s hands are off the wheel. Model 3 has a larger threshold setting, which is prone to false alarms, while ES8 and P7 perform normally.- Model 3 does not have a DMS (Driver Monitoring System) and cannot detect driver fatigue or distraction. ES8 and P7 monitor the driver’s state in real time and provide graded warnings to ensure safety.
-
Overall, the exit mechanism of ES8 for driver intervention is relatively conservative and can automatically recover in some conditions, while Model 3 and P7 exit directly and require the driver to take over.
-
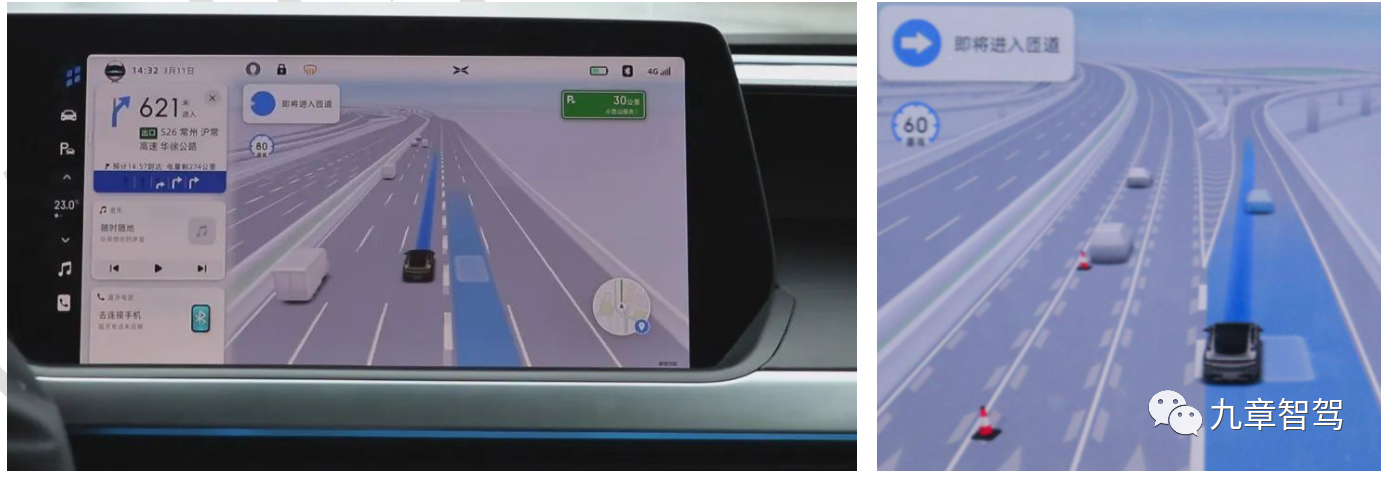
The amount of information displayed in the cruise scenario is similar among the three products, but the effects and styles are different. Model 3 only displays the NOA cruise effect on the HU, while ES8 and P7 simultaneously display perception and navigation information on the instrument panel and HU respectively. ES8 puts simplified navigation information in the HUD for better user experience. Model 3 has a simple display style, while ES8 and P7 give a slightly dazzling and complex impression, but both have voice prompts, so the driver can understand the current vehicle status through voice without paying too much attention to the screen display.
-
ES8 adds NOP function to the geographic fence range in navigation, giving the driver a greater sense of control, which is worth recommending.
-
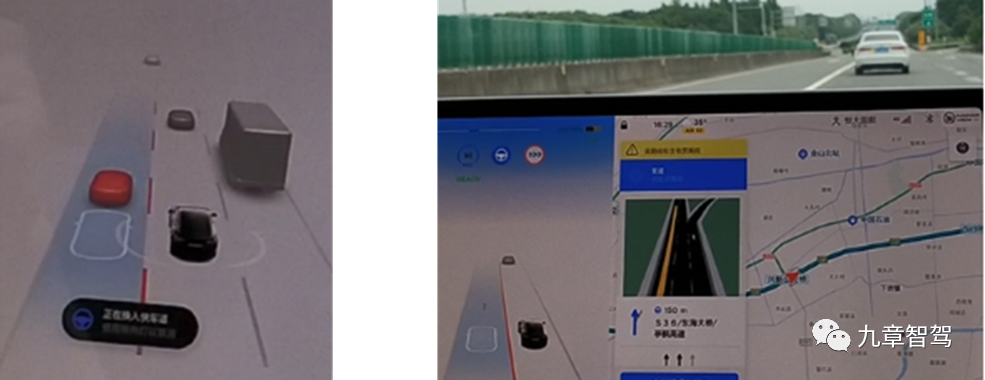
In the lane changing scenario, the display content of the three products is similar, showing information such as target lane, target parking space, and dangerous vehicles. However, the style and effect are different.The Model 3 reminds the driver of lane changing with steering wheel vibration, improving safety. However, the display lacks dynamic real-time display of the lane changing process, and it is difficult to see the effect of the ramp when the navigation changes lanes.
The ES8 displays the lane change process in real time through the direction and curvature of the guiding lines, but the prompt for the target lane is not obvious enough and lacks vibration reminder. However, there is voice prompt, which can also achieve the prompting effect.
The display effect of the target lane and the entire lane change process of the P7 are good, but the only shortcoming is the lack of vibration reminder. However, the voice prompt effect is also good.

Human-Machine Interaction Summary
The Model 3 has a simple human-machine interaction style with less displayed information. However, it lacks voice interaction and the user experience is poor.
The ES8 has a relatively complex human-machine interaction style with more displayed information. The operation of the ES8 is mainly through buttons, which is more traditional. The ES8 has voice interaction and HUD display, which improves the user experience.
The P7 has a complex human-machine interaction style with a lot of information displayed. The P7’s method of operation combines the lever and traditional button methods. The P7’s display style is similar to the ES8, and the voice interaction experience is good.
Currently, the Human-Machine Interaction (HMI) display effects of mainstream products are able to display the main road and obstacles. However, they are not complete and realistic enough. It is believed that with the improvement of perception and vehicle performance, the display effect will gradually improve to achieve true scene reconstruction.
The above is our complete evaluation of the three products. Due to environmental, regulatory and subjective factors, it is difficult to reach 100% accuracy, but it can provide reference for product development and verification.As Tesla, NIO, and Xpeng constantly introduce new products, and other manufacturers’ new products continue to appear, we believe that advanced intelligent driving functions will become more and more perfect and safer.
Attachment: Configuration and Technical Evolution Roadmap
Attachment 1. Configuration
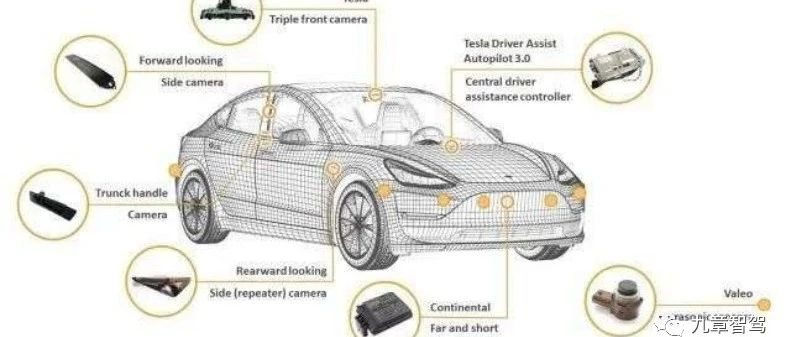
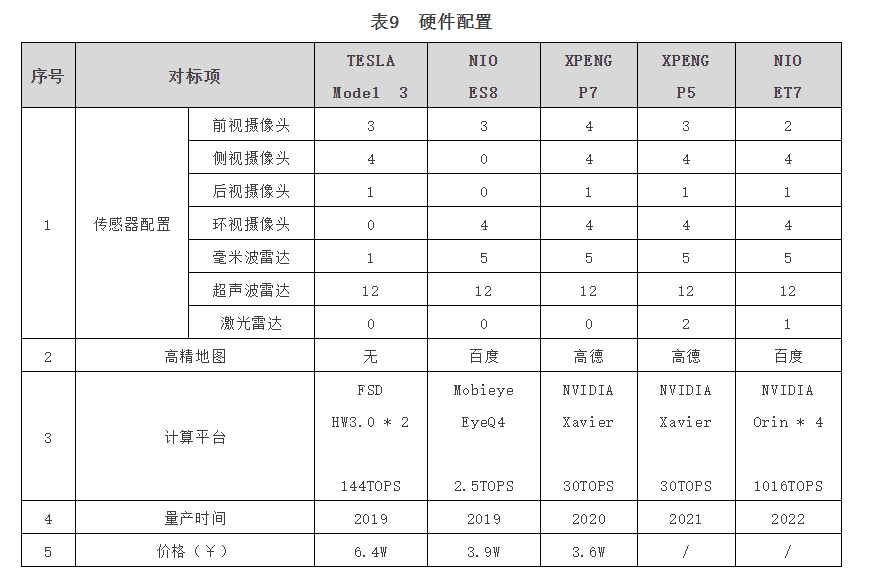
Table 9 shows the intelligent driving hardware configuration of Tesla, NIO, and Xpeng.
From the perspective of sensors, the sensor configuration of Model 3 and P7 is significantly higher than that of ES8. P7 even uses 13 cameras for perception fusion, which can be said to achieve the ultimate among current mass-produced products.
As for fusion positioning, NIO and Xpeng are equipped with high-precision maps from mainstream cartographers, which are fused with sensing results. Based on current sensing techniques, the effect is naturally superior to Tesla’s visual-only solution (Tesla’s millimeter-wave radar is only auxiliary).
In terms of computing platforms, Model 3 uses two Tesla-developed FSD chips, with a computing power of 144 TOPS, far exceeding ES8 and P7. The computing speed and efficiency are naturally leading, making it guarantee the operation of Tesla’s intelligent driving algorithm. At the same time, the self-developed chips must also have advantages in flexibility and adaptability compared to solutions using supplier chips.
The three models’ mass production times in China are similar, and Tesla’s price is relatively expensive, which is also the reason why some Tesla owners have not installed the FSD function package.
In addition, the recently launched Xpeng P5 and NIO’s ET7, released earlier this year, have not only significantly improved the number and performance of visual sensors (front view of 8 million pixels), but also added lidar. The chip’s computing power has also reached a luxurious level, and we believe that the sensing effect will be significantly improved.
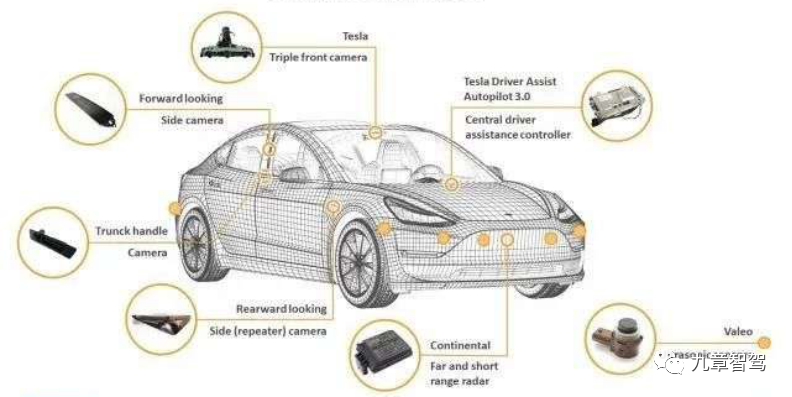
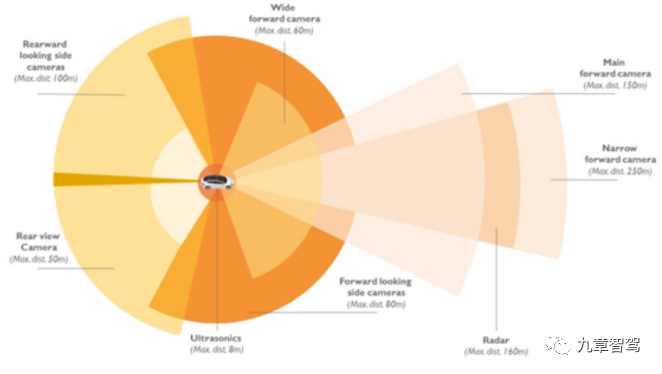
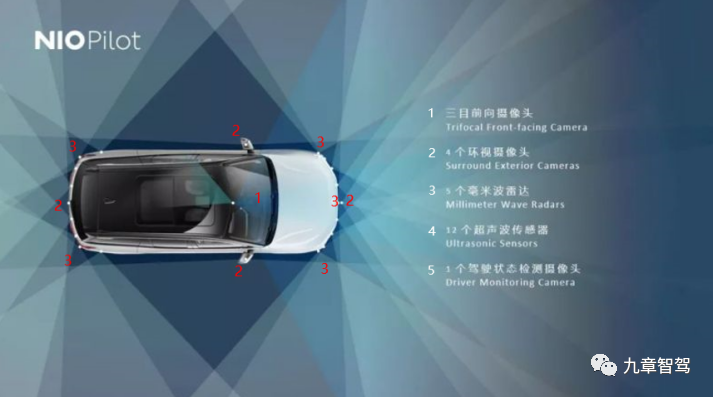
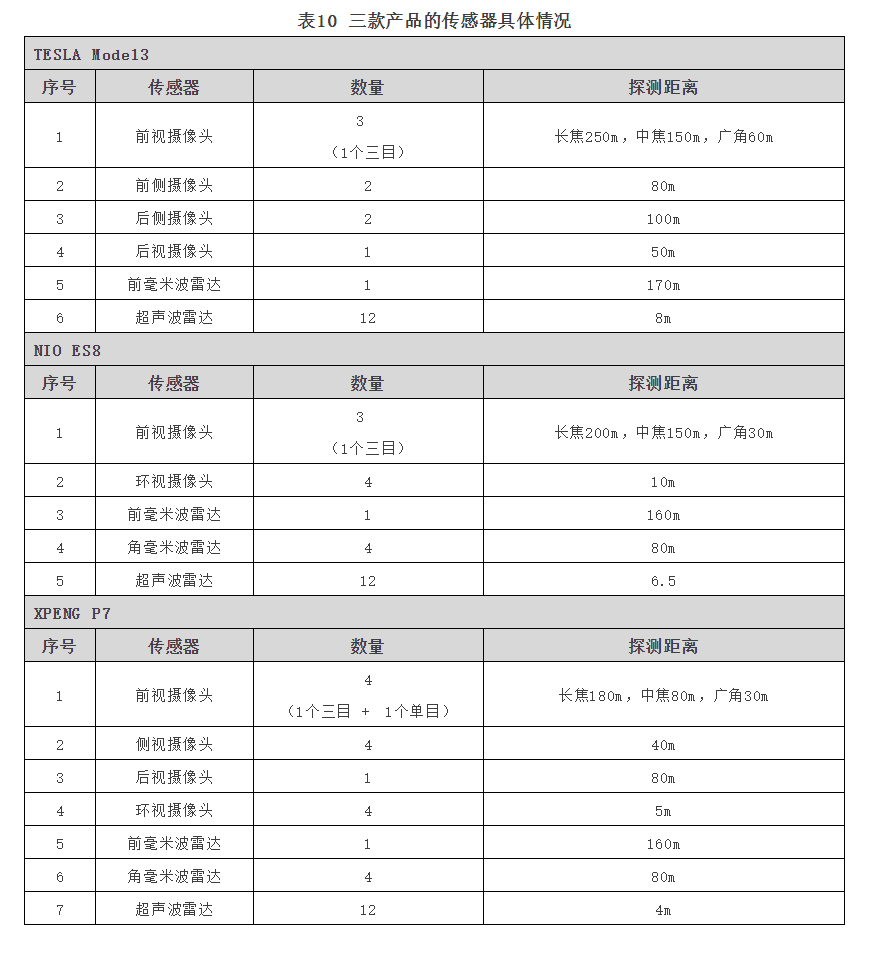
Figures 17 to 22 show the specific layout scheme and detection range of sensors for Model 3/ES8/P7, and Table 10 provides a quantitative description of the sensor detection distance of these three models.


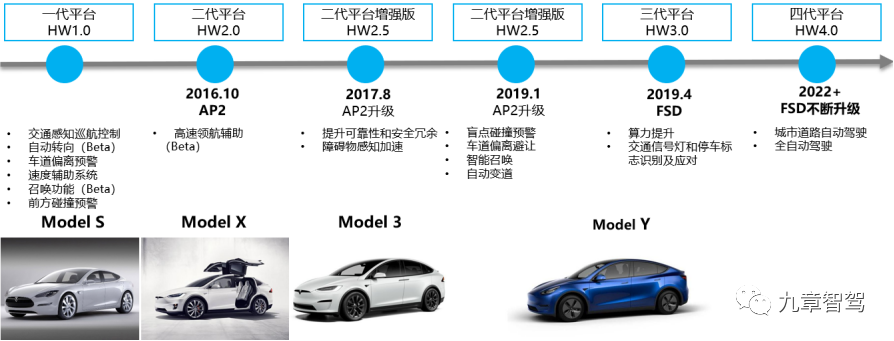
Appendix 2: Technological Evolution
From the technological evolution of products by the three companies, Tesla started early, with the NOA function in 2016, and later optimized and upgraded it in detail. NIO gradually added functions, more like a traditional mainstream factory. XPeng was a latecomer, and the NGP function of its second-generation product P7 has already reached a leading level.


This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.