Preface
As early as 1984, the ALV project of automatic driving was launched by Carnegie Mellon University in the United States. Since then, artificial intelligence technology has begun to try water applications in the field of automatic driving, and at the same time, gradually formed the most basic control strategy for automatic driving.
With the further maturity of automatic driving-related technologies, especially the application of deep learning, and the wave of electrification of cars, the wave of automatic driving began in 2015. Led by Google and Baidu in China, start-up companies in automatic driving have sprung up like mushrooms, and traditional automotive OEMs and parts have also entered the market one after another.
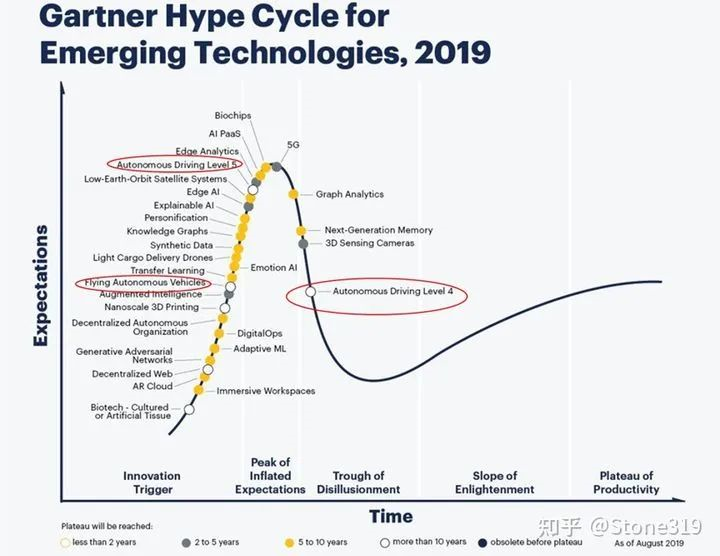
Then, after several years of research and development verification, and experiencing the capital winter in 2018, everyone began to return to reason with expectations for the landing of automatic driving. In 2019, the Gartner Hype Cycle for Emerging Technologies displayed that L4 level technology of automatic driving was in the period of disillusionment.
Now, with the increase in research and development investment across the entire industrial chain of automatic driving, the formation of consensus upstream and downstream of the industry, the improvement of supporting facilities and regulations under government support, the significant reduction in hardware costs, and the rapid improvement of software algorithm, the short-term landing scenarios for automatic driving are gradually becoming clear and clear.
Analysis of Automatic Driving Landings
To describe the situation of automatic driving landing, two concepts cannot be ignored: automatic driving level and geofencing level. The automatic driving level is used to describe the degree of automation of automatic driving in technology, and the geofencing level is used to describe the complexity of the operating scenarios of automatic driving.
Automatic Driving Level
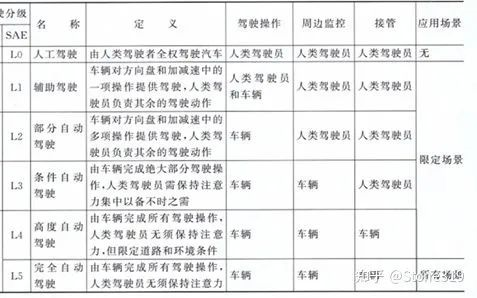
For the automatic driving level, the industry mostly refers to the SAE definition, which divides it into five levels according to the completion of driving operations, peripheral monitoring, and takeover tasks by drivers and systems, as well as the application scenarios of automatic driving.
The automatic driving level is divided into 5 levels, namely: L1, L2, L3, L4, and L5. As shown in the figure below:
-
The first three levels (L1-L3) constitute a process of continuously expanding the degree of automatic driving automation. By the L3 level, the vehicle itself can complete all dynamic driving tasks under automatic control;
-
The latter two levels (L4-L5) constitute the expansion of automatic driving in application scenarios. L4 level can only achieve full automatic driving in limited scenarios, and L5 level can be expanded to all scenarios, and these two stages no longer require drivers;
-
L3 level is a transitional stage for partial automatic driving and full automatic driving. At this stage, the system is responsible for monitoring the surrounding driving environment, but the driver needs to take over the vehicle when necessary.
Geo-fencing Levels
As mentioned above, except for fully autonomous driving level L5, which can adapt to all scenarios, other levels of autonomous driving operate in limited scenarios. The complexity of pedestrian and vehicle flows, as well as the operating speed, can directly reflect the level of autonomous driving.
Therefore, the concept of geo-fencing is introduced to grade the complexity of limited scenarios from the perspectives of vehicle speed, pedestrian flow, and vehicle flow, so as to better reflect the level of autonomous driving. Geo-fencing is also classified into 5 levels, as shown in the following figure:
-
Geo1 is the simplest traffic environment (low speed, no pedestrian, few vehicles), while Geo5 is the most complex traffic environment (freely moving, mixed motor vehicles and non-motor vehicles, etc.);
-
Geo2 focuses on low vehicle flow (low speed with few pedestrians or high speed with no pedestrians) traffic environment, while Geo3-4 focus on high vehicle flow traffic environment.
-
The main difference between Geo3 and Geo4 is that Geo3 is low-speed with few pedestrians or high-speed with no pedestrians, while Geo4 is low-speed with many pedestrians or high-speed with few pedestrians.

Implementation of Autonomous Driving
Whether autonomous driving can be successfully implemented depends on two points: the level of autonomous driving implementation scheme and the level of geo-fencing scenarios.
Obviously, the lower the level of autonomous driving that needs to be achieved and the lower the level of geo-fencing scenarios, the easier it is to implement autonomous driving.
The development of the level of autonomous driving capability is essentially a process of continually expanding to higher levels of autonomous driving and more complex geo-fencing levels. From the two-dimensional perspectives of the level of autonomous driving and the level of geo-fencing, the current consensus on the implementation status and trend of autonomous driving is shown in the following figure:
-
L1-2 low-level autonomous driving applications are expected to cover all scenarios in the short term;
-
Geo1-2 low-level geo-fencing scenarios are expected to reach L2 level and achieve autonomous driving in the short term;
-
Geo3 intermediate-level geo-fencing scenarios will expand autonomous driving functions in the short term and are expected to approach the level of L3 as much as possible;
-
In other cases, it takes a long time to achieve the implementation of autonomous driving. The expansion from L4 to Geo5 to achieve fully autonomous driving L5 is even further away.

Applications of Autonomous Driving Implementation
Typical Application Areas for Autonomous Driving Implementation# Application of autonomous driving in commercial field
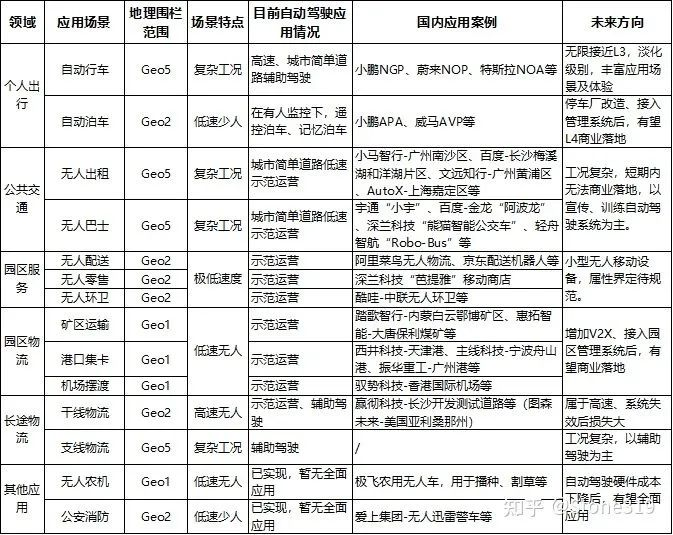
Currently, applications of autonomous driving from passenger cars to commercial vehicles, from transportation to logistics, from enclosed scenarios to open roads, and from intelligent driving to pilot operation are all involved. Here is a brief summary of the commercial application field, as shown in the figure below:
-
In the field of personal transportation, there are mainly two applications of automatic driving and automatic parking: automatic driving expands its functions and operating scenarios continuously, represented by XPeng NGP; automatic parking simplifies the parking scene and develops to Level 4, represented by WM AVP.
-
In the field of public transportation, there are mainly two applications of unmanned taxis and unmanned buses: they are currently in the stage of demonstration operation on simple city roads, and there is still a long way to go for commercial operation. Examples include Auto X and Xiaoma Zhixing Robot Taxi, Yutong “Little Yu” unmanned bus, and Light-boat Zhihang “Robot-bus”.
-
In the field of park services, the main applications include unmanned delivery, unmanned retail, and unmanned sanitation, represented by Cainiao unmanned logistics, JD delivery robots, and Zhonglian unmanned sanitation.
-
In the field of park logistics, there are mainly applications of unmanned transportation such as mining area transport, port trailers, and airport shuttles. Most of them are currently in the stage of demonstration operation such as TAGEAR intelligent driving mining area in Inner Mongolia, XiJing Tianjin Port, Yutong technology Hong Kong Airport, etc.
-
In the field of long-distance logistics, autonomous driving is applied to trunk logistics, and TuSimple is leading in the US Arizona demonstration operation. Due to legal restrictions in China, currently, only Winning Victory Technology has been tested and verified in Changsha.
-
Other application fields include special scenarios such as unmanned agriculture machinery, public security and firefighting, such as DJI unmanned seeders and Aishang Group unmanned patrol cars.
The typical application stage of autonomous driving
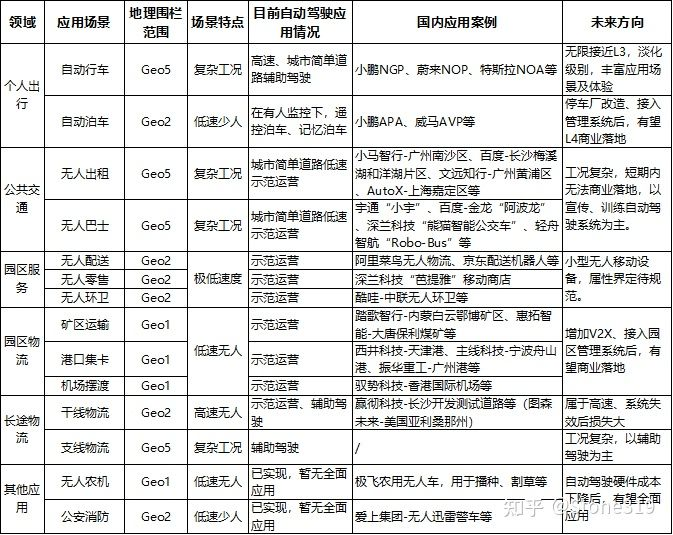
According to the level of autonomous driving and the level of geographic boundaries, I have classified the current typical applications of autonomous driving in another way, as shown in the figure below:
-
Applications such as unmanned agriculture machinery, unmanned patrol, unmanned delivery, and unmanned sanitation have achieved unmanned driving without obstacles due to the simplicity of the environmental factors and low-speed autonomous driving. With the reduction of hardware costs, commercialization is expected to be fully realized.
-
In enclosed scenarios such as mining areas, ports, airports, and parking lots, autonomous driving will provide reliable driving services by combining with the scene management system and is expected to be fully commercialized.
-
For automatic driving of passenger cars, due to the complexity of the scenario, its development lies in the continuous expansion of functions, which provides users with intelligent experience to achieve business value.
-
Unmanned taxis and unmanned buses, due to the complexity of the scenario, are unlikely to achieve commercialization in the short term. The demonstration operation is mainly used for corporate and local government propaganda and training of autonomous driving systems.
Postscript
The road to the implementation of autonomous driving is a process in which technological development and commercial interests drive each other, neither of which can be lacking. Among these, enterprises, governments, and individuals all play important roles. Let us work together for the better life that autonomous driving is about to bring!
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.