Preface
This year is known as the year of the LiDAR! Various manufacturers have released models with LiDAR, not only new forces like XPeng and NIO, but also traditional automakers such as SAIC, Great Wall, and BAIC, all planning to mass-produce in the next two years.
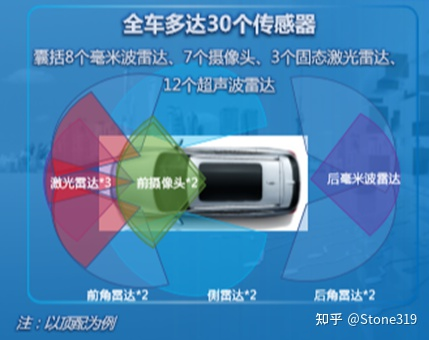
At the same time, the number of millimeter-wave radars has expanded from 1-5 to 6-8, with some models now employing 4D imaging radar, and in addition to front and surround cameras, side cameras (4) and a rear camera have become standard equipment.
Here, we briefly summarize the development roadmap of autonomous driving sensors (passenger cars) and the development trends of various sensor types.

Sensor Selection and Placement
The development of autonomous driving for passenger cars can be divided into two categories based on different application scenarios: driving and parking.
Due to the significant differences between driving and parking scenarios, there are significant differences in sensor selection. At the same time, various factors such as sensor performance, cost, and placement position need to be comprehensively considered.
Sensor Selection
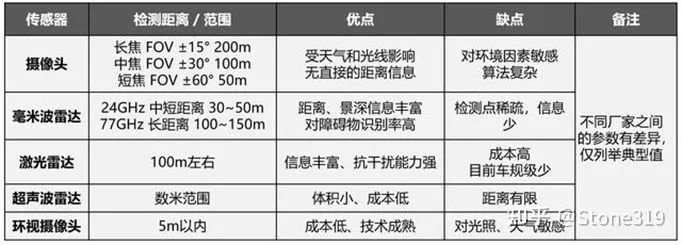
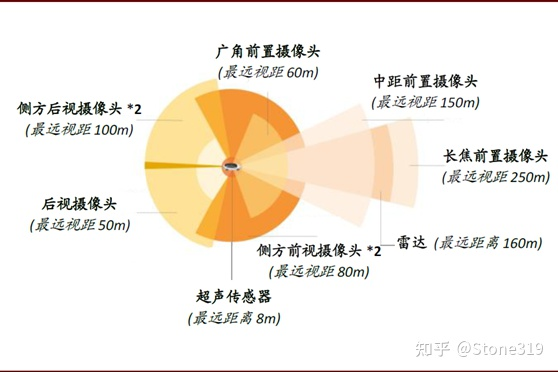
For driving scenarios, which mainly run at intermediate to high speeds, sensors with longer detection distances should be selected. The currently applied sensors mainly include cameras, millimeter-wave radars, and LiDAR.
For parking scenarios, which run at low speeds, sensors with detection distances of less than 10m are generally used. The currently applied sensors mainly include ultrasonic radars and fish-eye cameras.
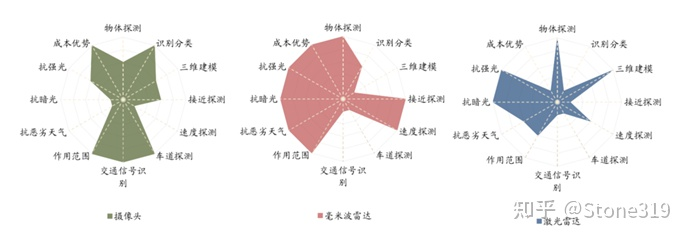
By fusing sensor data, the advantages of various sensor types can be utilized to the fullest.
Sensor Placement
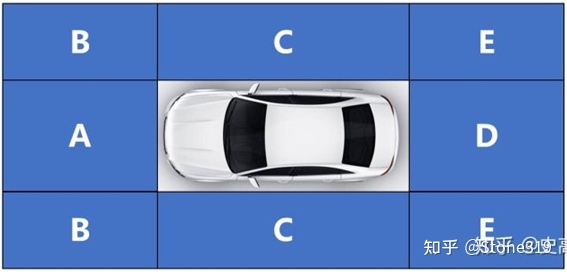
The vehicle’s periphery can be roughly divided into four areas: the front area A, the front side area B, the lateral area C, the rearward area D, and the lateral rear area E (as shown in the figure below):
-
For driving scenarios, area A is the most critical and the sensor placement is also the most diverse. The maximum detection distance generally needs to be 200 meters or more. The next most crucial areas are the lateral rear E area and the front side B area, which are used for changing lanes and traversing scenarios, and the maximum detection distance generally needs to be 80 meters or more.
-
For parking scenarios, the vehicle needs to be fully covered on all sides. As the parking speed is generally within 10 km/h, a detection distance range of within 10 meters can meet the requirements.
Sensor Scheme Development Phases
Driving Sensor Scheme
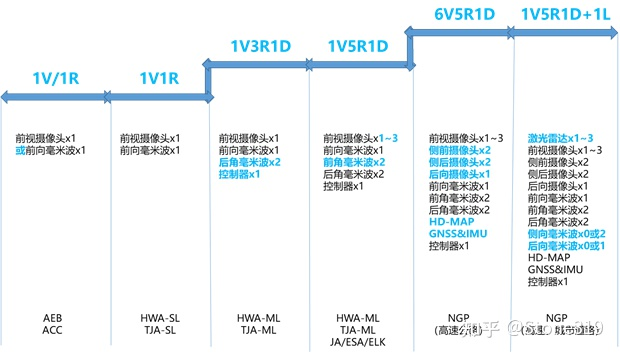
The development of driving automation can be roughly divided into three stages: single-lane driving assistance, multi-lane driving assistance, and point-to-point automatic navigation driving.
-
Single-lane driving assistance: Automatic Emergency Braking (AEB) and Adaptive Cruise Control (ACC) can be achieved through the forward monocular camera or the forward millimeter-wave radar. The advantage of millimeter-wave radar is the detection of vehicle speed, while the advantage of the camera is the recognition of lane lines and classification of obstacles. When the forward monocular camera and the forward millimeter-wave radar are used together, single-lane high-speed driving assistance (HWA) and traffic congestion assistance (TJA) can be achieved.
-
Multi-lane driving assistance: To achieve lane changing assistance, it is necessary to increase the sensing of neighboring lane environments. Usually, one millimeter-wave radar is added to each of the two corners at the rear of the vehicle to perceive the side and rear environments of the vehicle. Furthermore, adding a millimeter-wave corner radar at the front of the vehicle can expand the sensing of the side and front environments, and achieve functions such as Intersection Assistance (JA), Emergency Lane Keeping (ELK), and Emergency Steering Assistance (ESA).
-
Point-to-point automatic navigation driving: To achieve fully automatic driving from one point to another, it is necessary to sense the surrounding environment of the vehicle in all directions and increase redundancy. Generally, adding a front-facing LiDAR, side and rear-facing cameras and millimeter-wave sensors to enhance sensing, as well as adding high-precision maps and inertial navigation for positioning are needed.
Currently, automated driving has developed to the stage of point-to-point automatic navigation driving. The mainstream sensor scheme is: LiDAR x1~3 + millimeter-wave radar x5~8 + ADS camera x7~10.
Parking Sensor Scheme
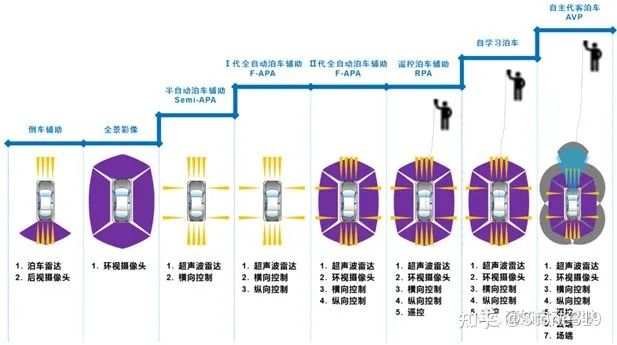
The development of parking automation can be roughly divided into four stages: reversing assistance, automatic parking, memory parking, and valet parking.
-
Reversing assistance: Collision warnings during reversing and providing four-around environmental imaging assistance for reversing can be achieved through reverse radar and panoramic imaging. Generally, four ultrasonic radars are installed at the front and rear of the vehicle for reverse radar, and four fisheye cameras are installed around the vehicle for panoramic imaging.- Automatic Parking: Based on the rearview radar, two long-range ultrasonic parking radar on each side of the car are added to recognize the parking space, achieving the automatic parking function with a total of 12 ultrasonic radar. Furthermore, it can be integrated with the panoramic camera to perceive linear parking spaces, enhancing the scene of automatic parking. It can also be combined with the key and mobile app to achieve remote parking function under driver monitoring.
-
Memory Parking: It achieves traceable parking within 100m without additional sensor installation, but the parking system needs to integrate front-view camera data and build a map through VSLAM. Furthermore, it can be combined with rear-view camera data to achieve traceable reversing.
-
Valet Parking: It achieves automatic parking within 1km, requiring high precision maps and inertial navigation point, and working with the parking lot system to achieve unmanned automatic driving parking.
Automatic parking has developed to the stage of memory parking and valet parking. Sensor solutions from different manufacturers usually adopt ultrasonic radar x12 and surround-view camera x4 schemes, and also need to be integrated with driving sensors.
Sensor Technology Development and Application
Camera
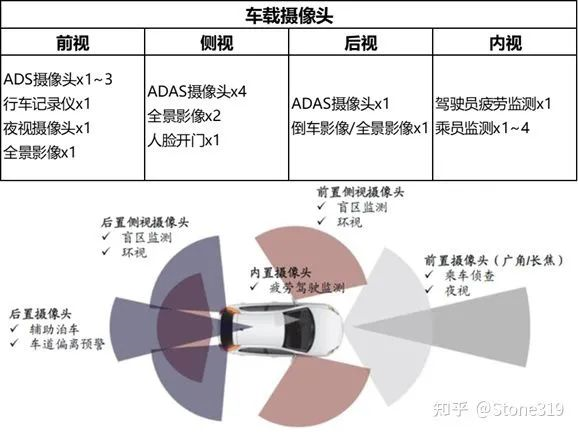
According to the installation location, in-vehicle cameras can be divided into: front cameras (including ADS cameras, driving recorders, night vision, surround-view front cameras, etc.), side cameras, rear cameras, and internal cameras.
For high-level autonomous driving, ADS cameras usually range from 7 to 10. Side and rear cameras usually have five in total, with the main difference in front cameras.
Front cameras usually adopt a combination of long-focus and wide-angle two-camera schemes. Some use binocular stereo camera scheme to recognize depth, but higher requirements for calibration and algorithm. Huawei adopts a combination of long-focus, wide-angle, and binocular four-camera scheme on its Polar Fox platform.
In addition, front cameras generally integrate image acquisition and visual processing, directly outputting target objects. With the current trend of centralized computing, cameras are moving towards “only collecting and not calculating,” and putting the computing part into the domain controller. For example, Tesla’s front camera does not have computing modules such as SoC and MCU.


Millimeter-wave Radar
The biggest advantage of millimeter-wave radar is the recognition of vehicle speed, which is a necessary sensor in the frontal area A of the vehicle. The millimeter-wave corner radar is installed at the front and rear corners of the vehicle and is used to expand the multi-lane driving assistance function. In some car models, millimeter-wave radar is applied to the rear view area D and the side view area C in advanced autonomous driving, such as the Great Wall Mocha sensor, and the number of millimeter-wave radar sensors has reached 8.
In terms of technological development, 4D imaging radar has the advantages of “height” detection, higher resolution, and the ability to classify static obstacles. It is mainly applied in the frontal area and achieves a similar effect as a low-line laser radar. At present, the SAIC R brand – ES33 has installed two 4D millimeter-wave radars made by Continental on the front bumper of the vehicle, with a detection distance of over 300 meters.
In addition, millimeter-wave gesture radar and vital sign monitoring radar are also worth paying attention to. At present, in-vehicle monitoring is mainly based on cameras, but cameras may involve personal privacy issues. Millimeter-wave radar can reduce this concern. Sensortech has developed STA60-1 gesture radar and STA79-4 vital sign monitoring radar. Among them, the STA79-4 vital sign monitoring radar has been installed on the Guangzhou Auto NIO co-created 007.



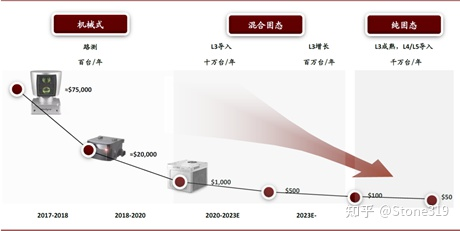
Laser Radar
The application of laser radar is mainly constrained by cost. With the maturity of MEMS and pure solid-state technology, the price of laser radar is expected to drop significantly, and the price reduction of laser radar will promote the increase in shipment volume, further bringing scale effect to promote its cost reduction.For the three core components of LiDAR – laser emitter, laser detector, and scanning unit:
- In the short term, due to cost and limited use cases for autonomous driving, the commonly used solution is a 905 nm laser emitter + Si laser detector + mirror/MEMS scanning unit;
- In the long term, the solution of choice is a 1550 nm laser emitter + InGaAs laser detector + solid-state or FMCW scanning unit, which offers superior performance and can adapt to a wider range of autonomous driving scenarios;
- Currently, LiDARs installed in domestic vehicles mostly use mirror-based scanning units, with both 905 nm and 1550 nm laser emitters available.

Postscript
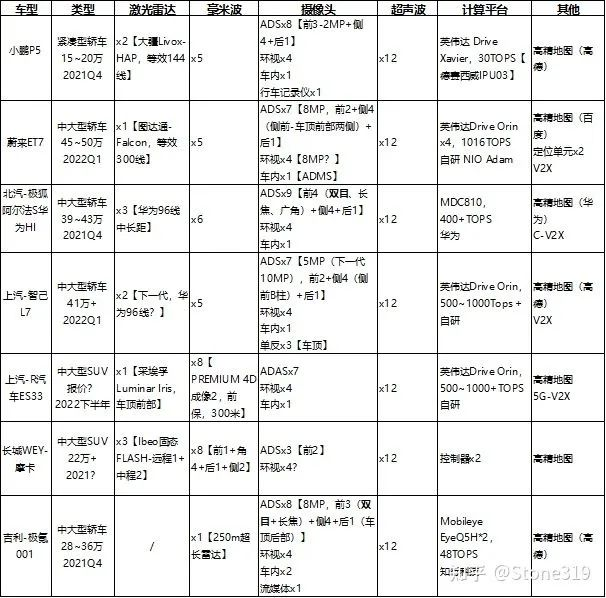
The following figure provides an overview of the sensor solutions of main domestic high-end autonomous driving vehicles:
- Huawei’s LiDAR solution is undoubtedly luxurious, but the high price may not be accepted by customers;
- XPeng’s intelligence capabilities have been well received. If the P5 can truly be priced below 200,000 yuan with two LiDARs, it will be very attractive;
- SAIC’s ES33, which is equipped with a 4D millimeter-wave imaging radar for the first time, may set a trend and change the competitive landscape on the basis of the trend of cost reduction of LiDARs.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.