Introduction
In addition to product launches and talent recruitment, Tesla AI Day also has a lot of technical insights. This article includes in-depth analysis of five aspects of planning difficulties, planning overall architecture, lane change plans, multi-car interaction, and trajectory smoothing.
As a leading company in the field of autonomous driving, every move of Tesla attracts the attention of practitioners. Just recently, the annual Tesla AI Day has provided engineers in the autonomous driving industry with eye-opening experiences. As the saying goes, “outsiders watch the excitement, and insiders watch the doorway.” The article “Tesla AI Day | AI, will it be the standard technology for car companies in the next decade?” has provided a fairly in-depth introduction to Tesla’s new products. This article aims to start with the author’s own field and deeply analyze Tesla’s latest decision planning related work.
Current Planning Difficulties
As the brain of the entire autonomous driving process, decision planning is likely to be one of the most challenging directions in autonomous driving. At any time, if people want to believe in autonomous driving and entrust their lives to machines, the most important part is decision planning. A good planning module can bring passengers a driving experience similar to that of a human driver, while ensuring safety and efficiency.
At AI Day, Ashok Elluswamy, the head of Tesla’s Planning and Control Module, first pointed out two major difficulties in planning issues. The first is that many times, our planning search space is non-convex, and the planning algorithm will fall into local optimal solution. How to construct the actual road scene into a convex problem is currently one of the planning bottlenecks. The second is that planning itself is performed in three-dimensional space, and such high dimensions will place great demands on computing power. How to use algorithms to reasonably reduce dimensions is also a difficult point that plagues the industry.
These issues are sharp and are currently the two most concerned problems that planners face. There are many related works published in academia to address these two aspects. However, it is unfortunate that Tesla did not explain how they solved these two problems at the conference, nor did they provide corresponding papers.
Planning Overall Architecture
Ashok briefly introduced the planning architecture currently adopted by Tesla. From this, we can see that the overall process is quite common, with planning divided into two parts: first, a rough search in the first layer, followed by continuous optimization in the convex space to obtain a smooth trajectory. Personally, I am very curious about how the convex space is obtained through decision-making, which should be the current difficulty.
From this flow chart and the convex space mentioned in the subsequent speech, it can be seen that Tesla’s planning algorithm is similar to Baidu Apollo’s overall concept, both of which rely on numerical optimization. The advantage of this algorithm is that it is highly scalable and can model actual road scenarios well. In addition, the cost function can be continuously optimized through learning methods to improve the safety and comfort of planning.
In the speech, Ashok gave an example of an actual planning training for lane changing. He claimed that their planning algorithm can conduct 2500 searches in 1.5 milliseconds, and generate trajectories of different lane changing times in simulation. The best trajectory is selected through evaluation of the trajectory.
For example, one trajectory changes lanes early and slowly, resulting in an uncomfortable experience for passengers. Another trajectory accelerates and changes lanes late, but may not be able to complete the lane change due to the left turn lane ahead, failing to meet navigation requirements. What is needed is a trajectory that balances safety, comfort, and efficiency. Therefore, Tesla generates a large number of trajectories and selects the optimal trajectory based on cost.
In this learning and training process, we can see the advantages of adopting optimization algorithms. Through a large number of sampling simulations in the simulation, and setting up an appropriate evaluation criteria, we can converge to the optimal trajectory that considers both safety and efficiency.
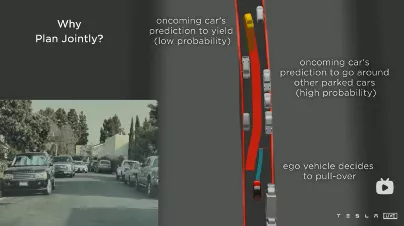
Tesla also discussed why other traffic participants on the road should be considered in the decision-making process. Our autonomous vehicles will inevitably encounter situations where other traffic participants coexist on the road. If these participant’s driving intentions are not considered in the decision-making, the resulting path will definitely be unsafe and not smooth.Tesla demonstrated a scenario of driving through a narrow road, where the Tesla self-driving vehicle initially waited on the right side, assuming a high probability of the car proceeding. It quickly made a decision to continue, upon noticing other cars also waiting. This handling of the situation is impressive, and sets Tesla apart from other autonomous driving companies that tend to wait conservatively, leading to traffic jams or a higher risk of collision. This demonstrates Tesla’s strong coordination between prediction and decision-making.
Additionally, Ashok discussed the final step of Tesla’s planning algorithm, trajectory smoothing. From the released image, constructing convex spaces is intuitively understandable, but it is unclear how these would be built in complex scenarios with multiple obstacles. Tesla also showcased the trajectory optimization iteration process in a visual interface, aiming to converge the algorithm to a trajectory with a relatively low collision coefficient and high comfort. The most crucial aspect is setting a precise evaluation algorithm which can help achieve more humanized path planning.
Overall, after watching Tesla’s AI Day presentation, I am personally amazed. The demonstration of roundabout interaction and the implementation of AI in planning have shown the powerfulness of Tesla’s algorithms. However, full autonomy is still a long way off, and it is hoped that domestic autonomous driving companies can steadily progress and avoid the radical approach of Tesla, ultimately achieving a position of market leadership.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.