Author: Aimee
Why does L4 automation require roadside cooperation?
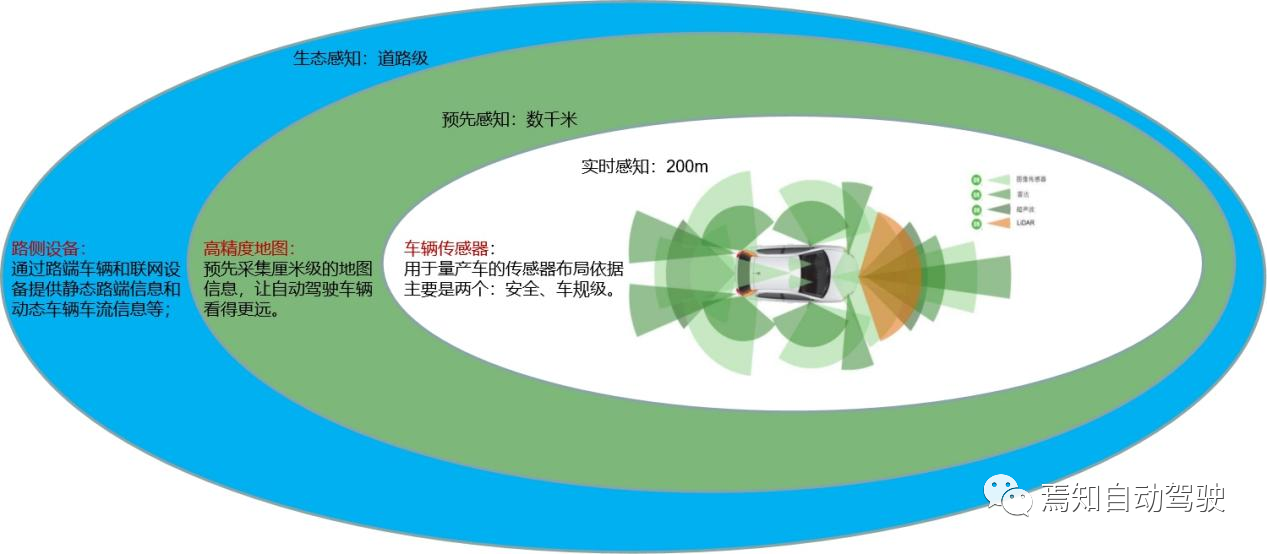
In the process of realizing autonomous driving, due to the limited perception range and the limitations of sensor performance, autonomous driving based solely on vehicle perception may temporarily reduce or even fail. Many typical driving scenarios cannot meet the requirements for safe driving, which is also the pain point for automakers to develop autonomous driving systems.
This makes the addition of roadside information a necessary process. Through statistical analysis of some automakers’ already mass-produced autonomous driving products, it can be observed that L4 needs to run safely and smoothly within its limited operating range ODD, which requires more optimization of roadside software with vehicle-side software coordination. Automakers hope to compensate for the shortcomings of vehicle perception by constructing intelligent roads, thereby improving the performance of autonomous driving and reducing costs.
How does L4 roadside cooperate with vehicles?
The application principle of L4 autonomous driving roadside is to use the co-processing ability of vehicle-to-infrastructure (V2X)/5G communication, sensing equipment on a smart road, edge cloud computing, etc., to participate in the driving control of autonomous driving vehicles. Vehicular infrastructure integration mainly involves three interfaces: vehicle-side, roadside and cloud-side, realizing interconnection and interoperability of information through real-time dynamic information of vehicles, roads, people, and traffic.
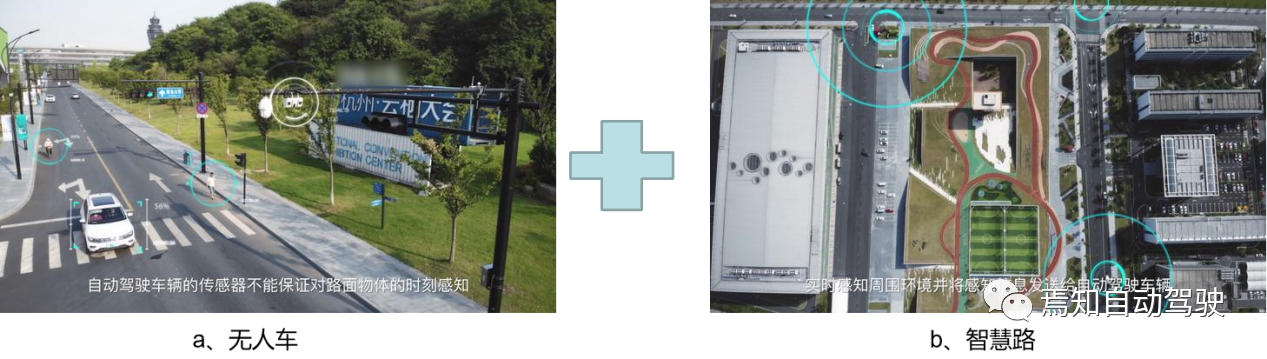
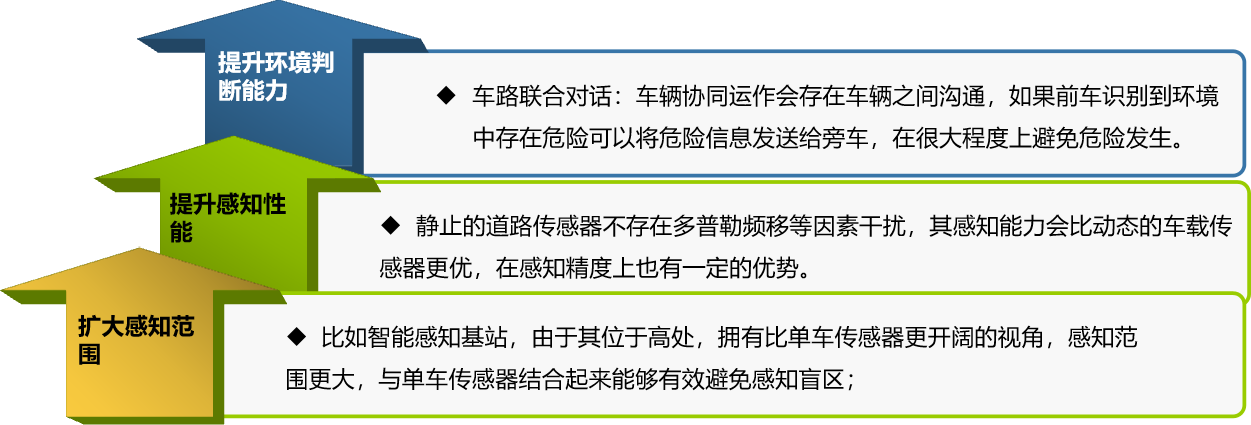
Autonomous driving cars involve the coordination between people and cars, cars and cars, and cars and roads. By considering the intelligentization of roads, intelligent devices can be placed on the roads so that sensed data can be shared with more surrounding vehicles through communication network. This will make autonomous driving operate better in the defined design environment and reduce dangerous factors such as collisions.
What are the main technical pain points for L4 roadside?
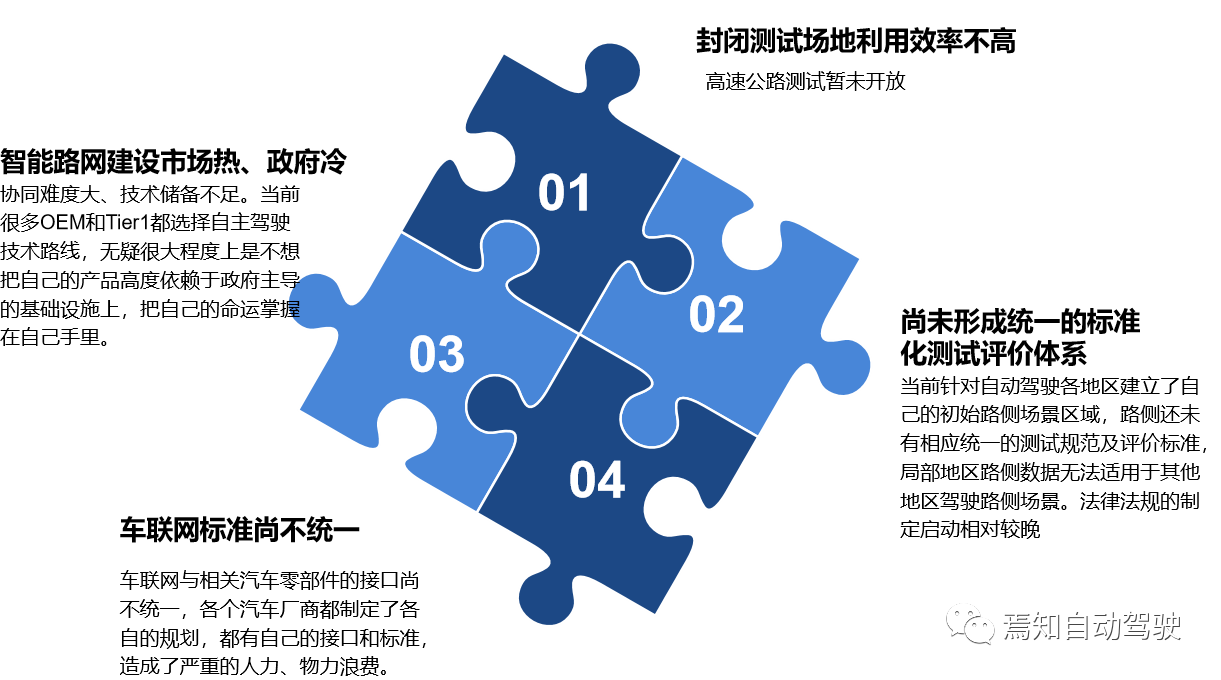
For highly autonomous driving, the system’s control ability needs to increase exponentially and it needs to be able to effectively handle and control in many different environments. This requires effective cooperation between the vehicle side and the roadside for effective environment information detection. However, the input situation for the roadside is not as easy as imagined and it is restricted by the following four factors.
L4 roadside technology demand roadmapTo achieve further autonomous driving control tasks for Level 4 autonomous driving, efforts must be made in the following areas:
- Accelerating the development of 5G networks and constructing road-side devices to perceive the high-speed environment holographically;
- Establishing a V2X system with in-car communication devices and cloud control centers to promote intelligent connected vehicle testing and application demonstration based on vehicle-infrastructure cooperation;
- Encouraging the government and leading car manufacturers to create a relaxed and suitable policy environment for autonomous driving and providing appropriate policy support for road-side construction to accelerate the construction of test bases and implementation of mutual recognition of test access.

How does the Level 4 road-side system ensure safety?
Due to the limitations of perception blind spots and visual distance, the entrance and exit of highways and tunnels are accident-prone areas for both ordinary vehicles and autonomous vehicles. Moreover, the traffic situation in this area directly affects the efficiency of high-speed traffic. The Level 4 road-side system can perform real-time situation awareness, congestion prediction, and emergency event detection at these key points, thereby effectively solving safety and traffic efficiency issues in autonomous driving testing and improving traffic monitoring and management capabilities. By deploying corresponding scenarios on different types of roads, road-side units can not only ensure the safe passage of vehicles but also meet the testing needs of intelligent connected vehicles.
The deployment scenario of the intelligent road-side system is shown in the following table:
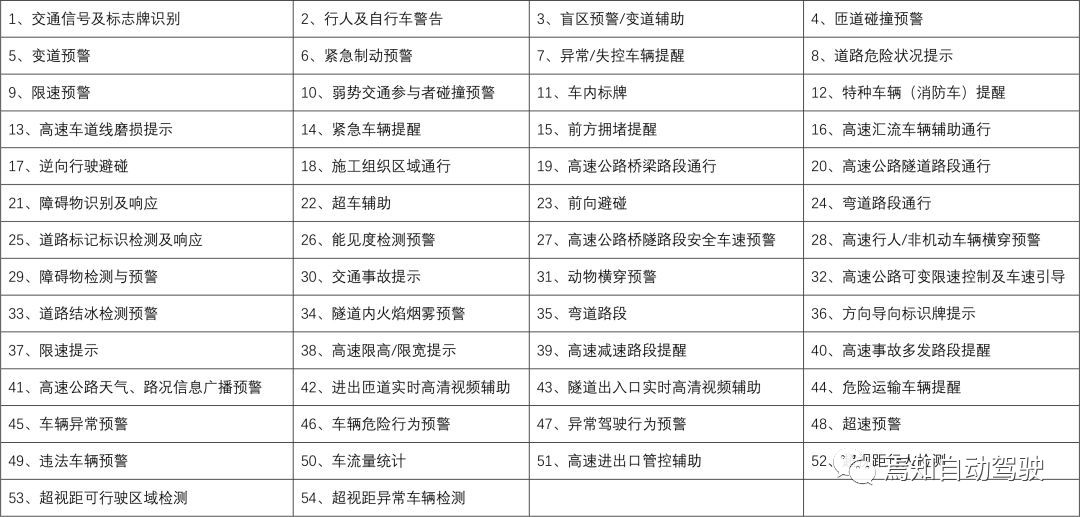
To better illustrate how road-side units can ensure the safety of autonomous driving, we list a series of problems that currently exist in Level 3 autonomous driving and propose solutions using road-side perception capabilities.
Example 1: Safety strategy for tunnel entrance road-side unit
-
Principle explanation: When a vehicle enters a tunnel, the low brightness of the tunnel entrance results in a “black hole effect” in the driver’s field of view, creating a blind spot inside the tunnel entrance. The road-side perception system is able to detect obstacles and abnormal vehicles near the tunnel entrance through installed sensing devices, improve driving safety, and send abnormal information to approaching vehicles via V2X to achieve beyond line-of-sight perception.
-
Road-side safety strategy: Considering the characteristics of the tunnel entrance, the road-side perception system can be constructed by installing sensing terminals on the wall at a certain distance (usually 5-10 m) in front of the tunnel. These sensors can observe the real-time road conditions at a certain distance (usually 100 m beyond visual range) inside the tunnel to eliminate the adverse effects of the black hole effect on the driver or the autonomous vehicle’s camera. At the same time, a camera is set up to capture abnormal driving vehicles or construction personnel trespassing within the 100 m area outside the tunnel entrance in real-time to ensure driving safety.
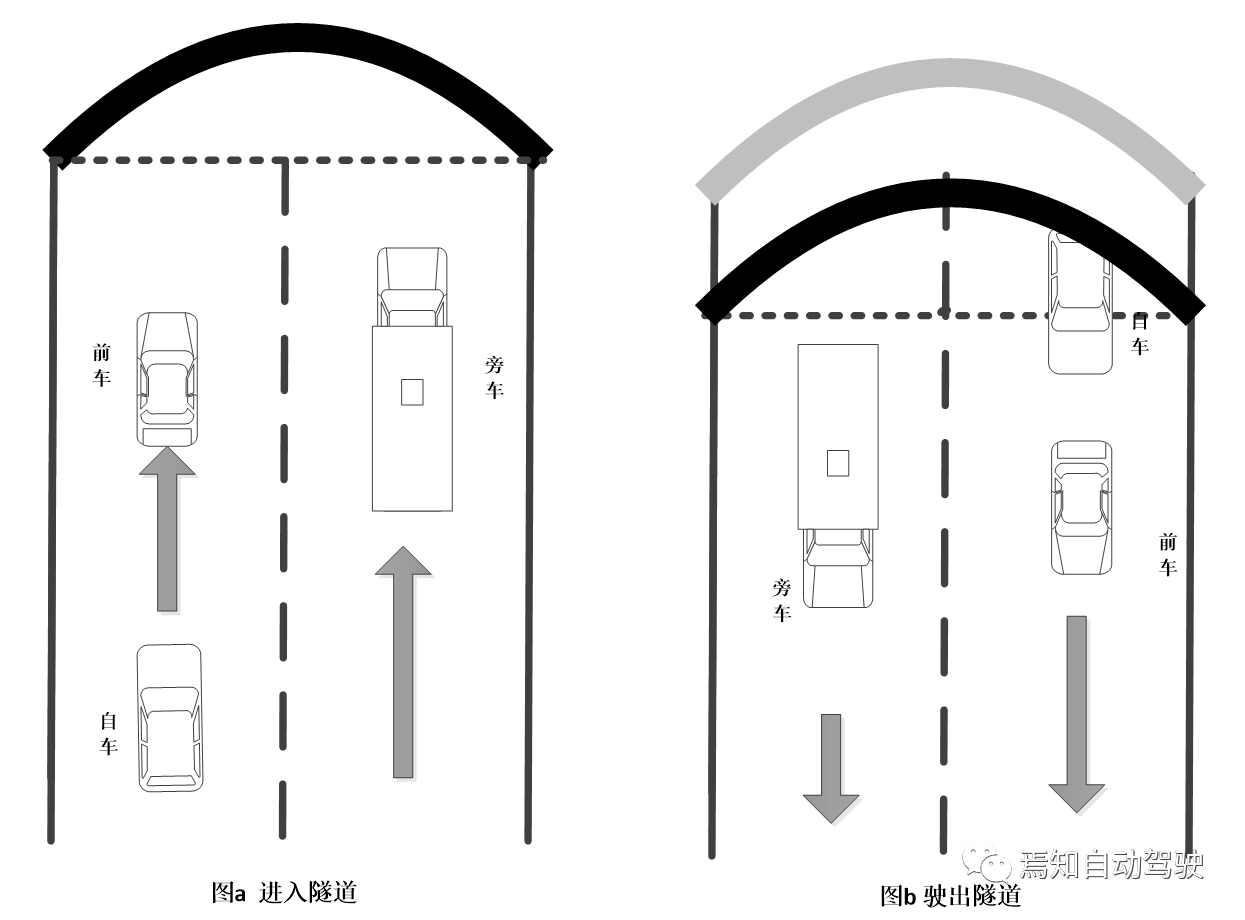
Example 2: Safety strategy for tunnel exit roadway
-
Principle explanation: When vehicles leave the tunnel, they transition from the dark to the bright, which causes a “white hole” effect that creates a blind spot for drivers outside the tunnel. By installing roadside perception devices at the tunnel exit, the system can perceive the environment outside the tunnel and send abnormal situations to other vehicles approaching the tunnel exit through V2X, which can improve traffic safety.
-
Roadside safety strategy: Similar to the tunnel entrance, a wide-angle camera perception device will be installed at a certain distance from the tunnel outside to observe the real-time road conditions within the closer range outside the tunnel. At the same time, another narrow-angle camera is set up to detect special conditions such as cone barrels and triangular warning signs within the farther range outside the tunnel to increase the perception ability of the sensor.
Example 3: Safety strategy for merging roads
- Principle explanation: High-speed highway ramps or intersections have large traffic flow and limited visibility, making it difficult for merging vehicles to perceive possible collision risks due to the large single-vehicle blind spots. Roadside units can deploy comprehensive detection devices for high-speed merging vehicles in the merging area to send relevant vehicle information in advance and achieve passing assistance functions. This process can reduce vehicle collision accidents and effectively ensure driving safety at high-speed merging points.
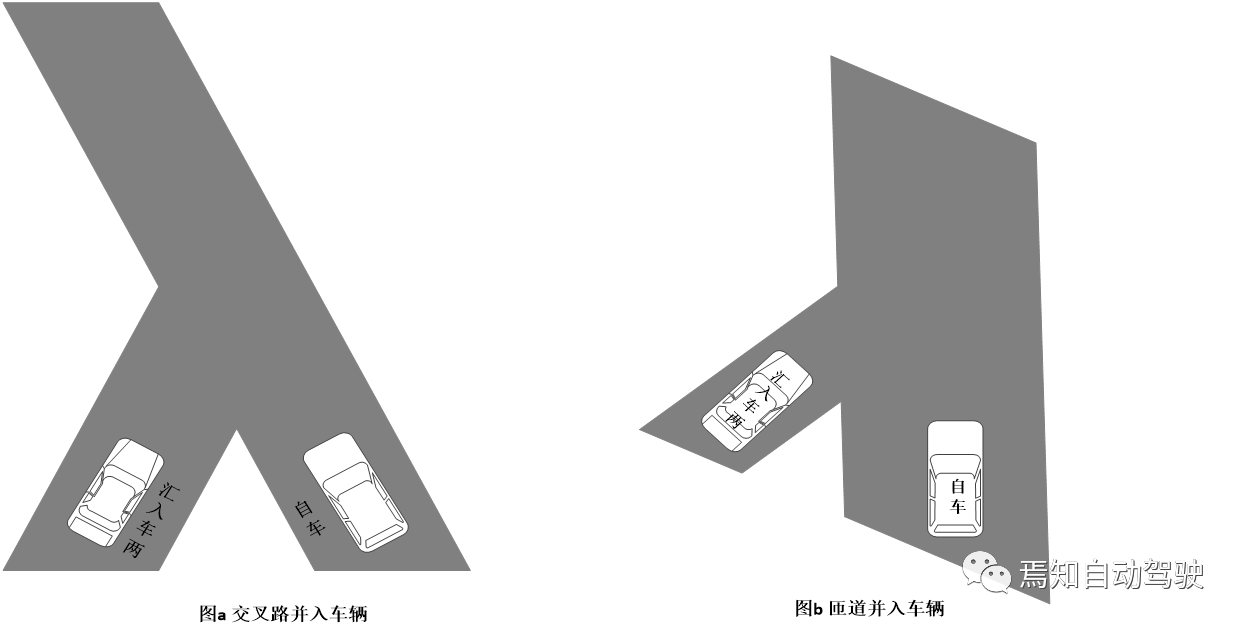
- Roadside safety strategy: Two nodes are deployed in each merging area to perceive the position, direction, and speed information of vehicles that may pose a threat to their driving on the main road. Each node deploys a roadside perception system, whose key observation area is the merging area, and the camera and millimeter-wave radar of the road test unit’s built-in camera are accurately fused in the edge system of each perception device. At the same time, special treatment has also been made for the GPS positioning of networked vehicles, making the roadside fusion system more perfect, and the perception information is transmitted in real-time through various sending and receiving units.
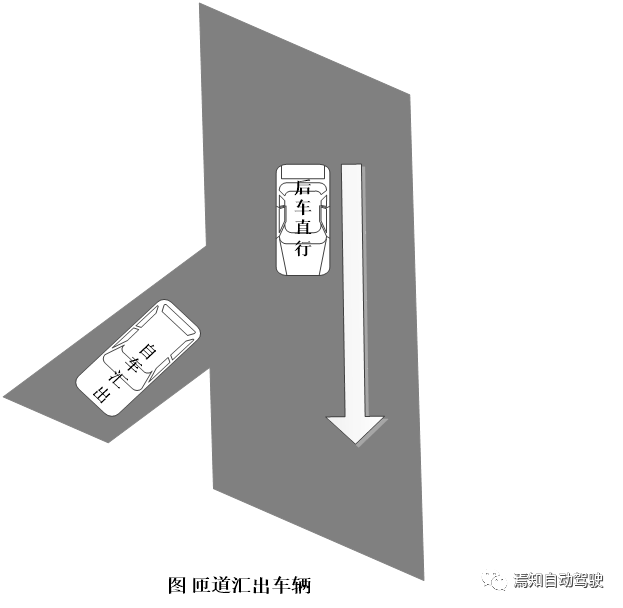
Example 4: Ramp departure
- Principle explanation: There are many dangerous driving behaviors, such as consecutive lane changes, when vehicles exit highway ramps. Vehicles suddenly slowing down or stopping in the ramp diversion area will cause traffic congestion, which poses huge safety hazards to autonomous driving in this area.
 ### Roadside Safety Strategies
### Roadside Safety Strategies
The installation of roadside units with holographic perception systems at off-ramp exits can enable real-time detection of vehicle speed, position, and other information. Abnormal parking and emergency lane changes within the diversion line area can be detected and abnormal situations or long-distance information can be sent to approaching vehicles through V2X in advance. The monitoring area of the off-ramp node covers a certain distance before the off-ramp (generally around 100 m) and after the off-ramp (generally around 50 m). Roadside equipment on the front side of the road needs to be installed where the view is most open at the off-ramp. By installing simple cameras and supplementing them with millimeter-wave radar and other devices, the data from both can be fused to capture these behaviors in real-time. On the one hand, I2V can be used to provide reminders to rear vehicles, and on the other hand, I2N can be used for timely reporting, capture, and processing of vehicle violations.
L4 Roadside Software Architecture
The software architecture of L4 autonomous driving systems includes not only conventional vehicle-side software but also the next-generation roadside software, which consists of three major modules: roadside perception, cloud information scheduling, and edge computing platform.
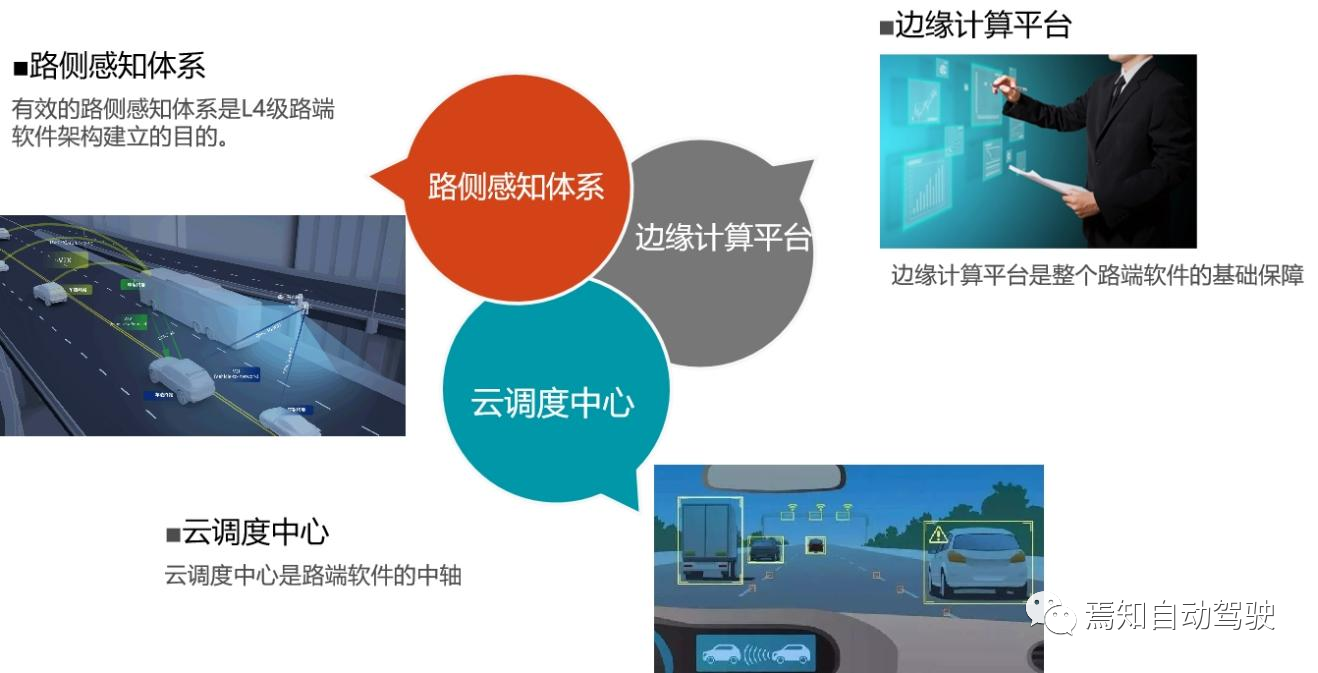
①Roadside Perception
For roadside perception, the “long-distance perception” concept has been proposed, and three important perception modules have been designed and developed: active long-distance video transmission, long-distance drivable area detection, and long-distance obstacle perception.
②Cloud Information Scheduling
An on-demand remote control and monitoring center with cloud computing capabilities is needed for the L4 roadside perception system to achieve cloud-based autonomous driving control and traffic dispatch.
③Edge Computing Platform
By using virtualization and network technology to integrate large-scale and scalable computing, storage, data, and application distributed computing resources to complete AI model algorithm training, it can achieve training of AI models in the cloud and deploy them to embedded platforms through vehicle-cloud collaborative technology, allowing AI algorithms to be deeply applied in vehicle-side autonomous driving systems.
Conclusion
The development of autonomous driving technology has reached the stage where infrastructure must be transformed. A smart road network with full-domain data sensing of “people-cars-roads” needs to be fully constructed, entering a new stage of coordination between “smart cars” and “intelligent roads,” that is, transitioning from autonomous driving to vehicle-road coordination. Roadside transformation can first be carried out for relatively simple and fixed scenarios.The driving routes of passenger cars vary due to personal and time differences, and it is difficult to deploy them on a large scale in the short term. However, it is relatively easy to transform fixed logistics routes, as the usage rate is high and the marginal cost will be greatly reduced. For widely used cars, autonomous driving technology is more possible and realistic. Of course, for city buses and transportation vehicles in mining areas and ports, which have fixed routes and specific areas, the advantages of vehicle-road coordination technology can be fully utilized.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.