
*Author: Hong Zexin
Currently, the mainstream sensors equipped on vehicles with autonomous driving capabilities are cameras, millimeter wave radar, ultrasonic radar, and LiDAR.

Why doesn’t Tesla use LiDAR?
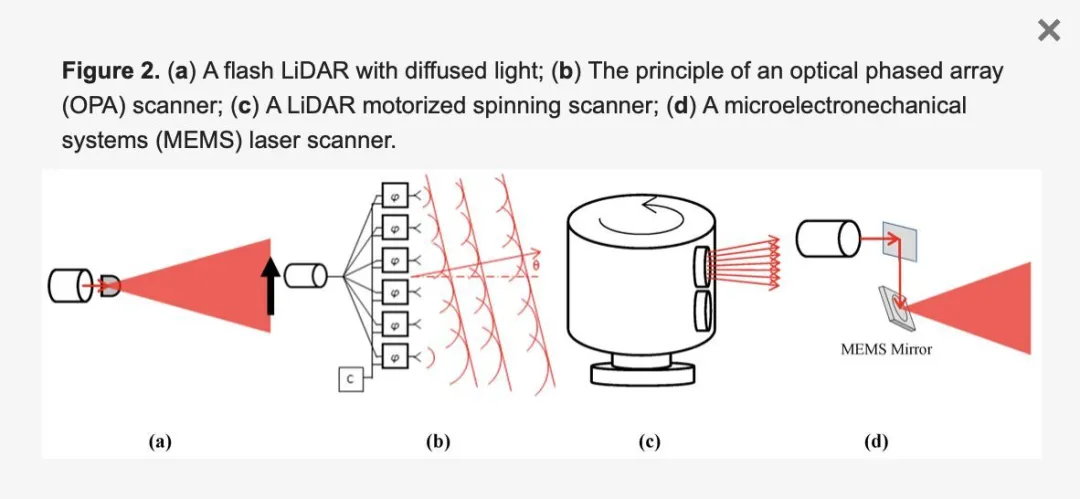
Currently, automotive LiDAR can be mainly divided into four types: mechanical, MEMS, OPA, and Flash. To put it in simple terms:
The principle of LiDAR is similar to that of using a laser pointer to emit light externally. The direction and angle of the solid-state LiDAR emitting laser are fixed, so the coverage range is limited. The principle is simple, the device is relatively stable, and the cost is low.
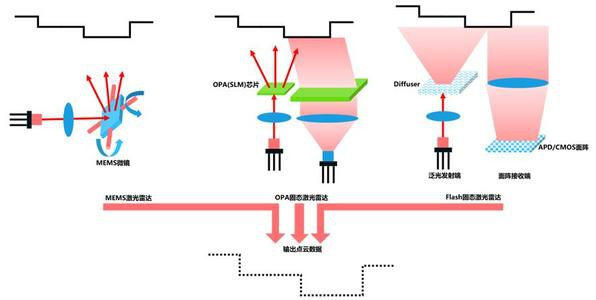
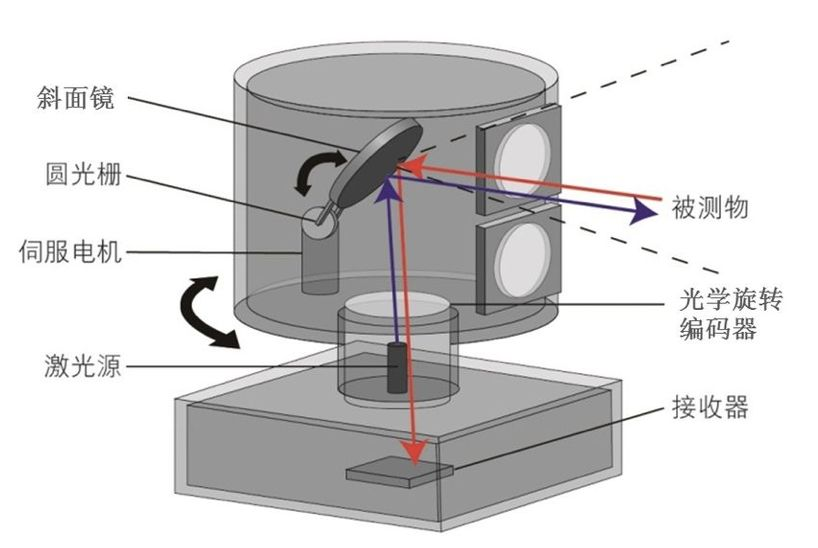
Mechanical LiDAR rotates a mirror around the laser source to achieve coverage in more angles. For example, some vehicles have instruments rotating on them.
Because of the high assembly requirements, mechanical LiDAR is difficult to mass-produce. For example, Velodyne’s 32-line LiDAR HDL-32E requires 32 sets of transmitting light sources and 32 sets of receiving light sources to be debugged one by one, and is prone to malfunctions.

Hybrid solid-state LiDAR uses MEMS scanning mirrors to complete the laser scanning, as shown on the far right of the figure below. It requires fewer moving parts than mechanical LiDAR, so it is more stable and easier to meet the mass production requirements of automobiles while ensuring performance.
The reason why Tesla does not use LiDAR is that the cost of LiDAR is currently higher, and the number of LiDAR systems that can reach the car compliance level is limited and the stability is not high.
Currently, many car companies such as XPeng and NIO claim that they will equip their new models with LiDAR. In the field of L4 autonomous driving, companies that use LiDAR are represented by Google Waymo, which is a multi-sensor fusion route, using both cameras and LiDAR.
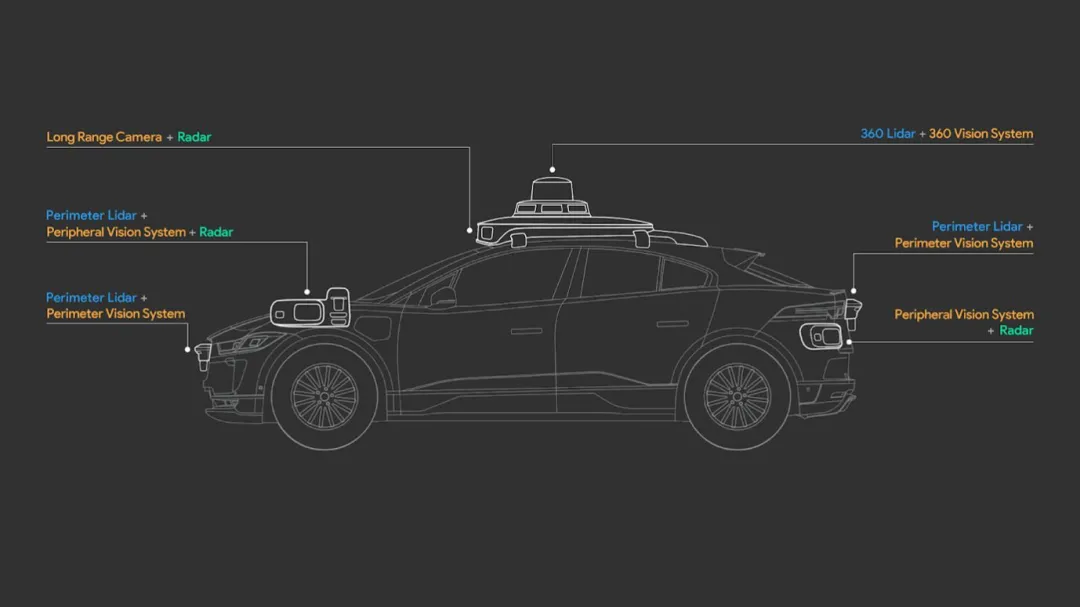
Multi-sensor fusion is the main path adopted by Waymo, playing a vital role in autonomous driving applications.
Each sensor has its own advantages and disadvantages. For example, cameras have difficulty capturing sufficient visual information in low light and high contrast conditions; LiDAR can easily create false points in scenes such as fog/rain/snow/car exhaust/reflections; and mmWave radar can reduce the credibility of radar detection in scenes such as tunnels and bridges.
Autonomous driving, due to its high complexity and focus on safety, needs to rely on the mutual fusion of multiple sensor data to improve perception efficiency. There are various ways to fuse multi-sensor information, such as forward and backward fusion.
Forward fusion directly fuses the raw sensor data together for processing, enabling the algorithm to obtain the most comprehensive data at the beginning. However, if a sensor malfunctions, it will cause the perception module to fail.
Backward fusion processes each sensor’s information separately, and each sensor obtains results close to the final form on its own processing channel, and then fuses them together. This method makes different sensors more independent of each other, so even if individual sensors fail or the calibration synchronization deviates slightly, it does not significantly affect the final result. But it consumes more computation power.
The debate between Google and Tesla about whether to use LiDAR has never stopped in recent years. This is not only a debate between the two companies but can also be said to be a dispute over the path to achieving autonomous driving.
Does Tesla not use high-precision maps?
What is a high-precision map?

The above picture is a normal navigation map, but this type of map often fails in cities like Chongqing.
Chongqing has a large number of roads traversing the mountains, and its elevated highways are generally designed with about 4 levels. When following the navigation, the navigation may show that you are taking the route on the 3rd level, but in reality, you are on the 4th level.

The following picture is a high-precision map:
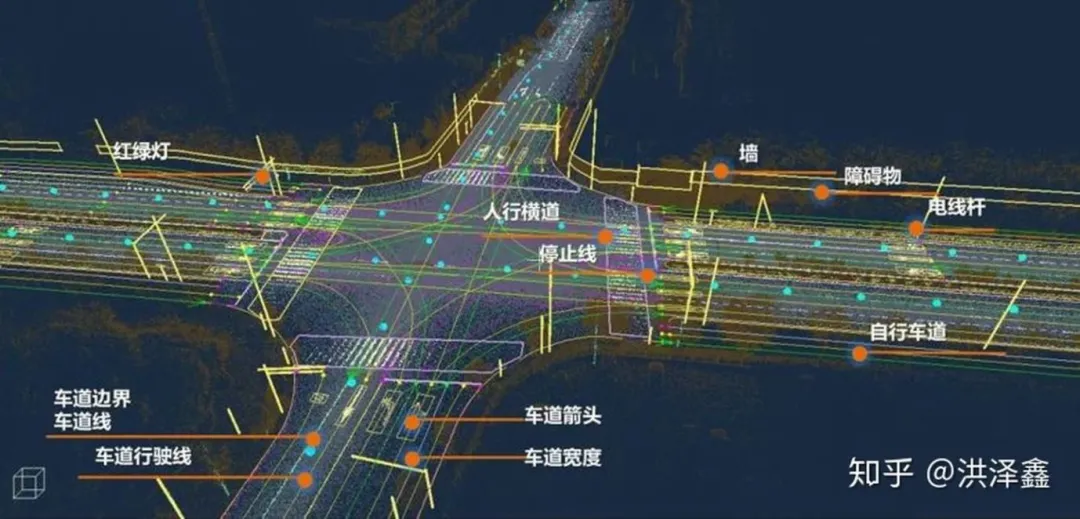
This type of map only contains basic information such as lane markings, road signs, and traffic lights. These high-precision maps are for the vehicle to use, not for people to view, and must be updated in real-time. The maps may not be aesthetically pleasing and may omit many details.If a vehicle is compared to a person, then a high-precision map is the memory of a specific road section in your mind. If the scenery around matches your memory, you can tell where you are specifically, which avoids problems such as not being able to distinguish between the main road and the side road or whether you are on an elevated bridge or under it, as often happens with navigation maps.
In the field of autonomous driving, a general navigation map only serves for navigation. However, a high-precision map has many other uses as well. Here are a few examples:
- Coping with complex weather and lack of road information
When an autonomous vehicle is driving on the road and finds that a lane marking has been worn away, will it cross the line or even run off the current lane? With a high-precision map, the vehicle can stay in a lane even when the lane is incomplete or has no lane markings.
In sudden heavy rain or snow, some lane markings may be affected by the reflection of rainwater on the road surface, or even covered by snow. A high-precision map reduces the impact of these situations.
In addition, when an autonomous vehicle passes through a slope, the information about slope in the high-precision map allows the vehicle to plan its speed in advance. Or, when the vehicle needs to go through a curve, the high-precision map provides the curvature information in advance, allowing the vehicle to plan the best turning speed.
- Making autonomous driving decisions more consistent with human driving habits
Currently, autonomous vehicles drive at low speeds mainly due to safety considerations. The perception of speed limits by autonomous vehicles may not necessarily be accurate. For example, the speed limit on the previous road was 40 kilometers per hour, while on this road it has changed to 60 kilometers per hour, but there is no signage.
If the vehicle maintains a speed of 40 kilometers per hour on the road, it will definitely be honked at, overtaken, and may even cause accidents.
High-precision maps can also collect historical information to know the average driving speed of vehicles on a certain road section during a specific time period. This way, autonomous vehicles can choose a suitable speed that is more in line with human driving habits. It is similar to the current general navigation maps that can query the estimated travel time of a certain section of the road at a certain time in the past.

- Better understanding the behavior of other vehicles in complex environments
In order to enable autonomous vehicles to respond to other vehicle behavior in a timely and accurate manner during driving, and ensure driving comfort and safety, algorithms need to make relatively accurate predictions about the behavior and path of other vehicles.
With the information provided by high-precision maps, it can provide strong auxiliary information for predictive algorithms. For example, through a high-precision map, it can be determined that there is an entrance to a side road or a lane merge to the right ahead. Therefore, vehicles appearing in that area are likely to make actions such as changing lanes to the left or accelerating to merge.According to the virtual-actual situation of the left and right lane lines, it can also better help autonomous vehicles judge the possibility of other vehicles cutting in.
In the future, it can also be combined with the sensor information from the roadside, such as the existing speed limit cameras on the road. If the vehicle information on the road can be sensed through perception algorithms and synchronized in high-precision maps, there will be no blind spots around the vehicle, and situations like ghost probes can be avoided.
Currently, the two biggest problems with high-precision maps are:
- Lack of unified standards
It is possible that each company has its own standards, so the data cannot be shared and the maps cannot be used universally.
A unified data model and exchange format for high-precision maps will help reduce development time and unnecessary costs for car manufacturers while ensuring that high-definition maps used by different vehicle brands can continuously share refreshed data.
In June 2019, the National Intelligent Transport System Standardization Technical Committee officially issued a national standard solicitation draft for smart driving electronic map data models and exchange formats on its official website. The participating units drafting relevant national standards include NavInfo, Amap Software Co., Ltd., Beijing Baidu Netcom Technology Co., Ltd., Highway Science Research Institute of the Ministry of Transport, Wuhan Zhonghaiting Data Technology Co., Ltd., Shanghai Automotive Group Co., Ltd., and Beijing Construction University.
- High and slow updating costs
At present, many autonomous driving solutions in China use LiDAR laser radar for positioning. By using the laser emitted by LiDAR to perceive surrounding buildings and road environments as constraints, high-precision positioning can be achieved.
This solution can achieve positioning accuracy at the 10 cm level, but the cost of LiDAR is high, making it difficult to build and update maps on a large scale.
There is also a vision-based positioning scheme, but the map produced by this scheme has too much uncertainty, after all, it relies on vision and may miss many things.
High-precision maps are crucial for autonomous vehicles. Without addressing these two major challenges, it will be difficult for autonomous driving to have large-scale commercialization.
In the case of firmly not using LiDAR and high-precision maps, Tesla’s current autonomous driving function can only achieve level L2, which is only an auxiliary function and cannot be implemented without hands or feet. The level of technology is far from mature.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.