
In the previous sharing (link), I introduced the principle of GPS (triangulation) and its characteristics (accuracy and frequency), and also discussed why GPS alone cannot meet the positioning requirements of unmanned vehicles from the perspective of unmanned vehicle control.
To enable the unmanned driving system to obtain positioning information at a higher frequency, sensors with higher frequencies must be introduced. This is the protagonist of this content – IMU (Inertial Measurement Unit).
The following image shows the NovAtel SPAN-IGM-A1, an IMU recommended for use in Baidu’s Apollo plan.

The latitude and longitude information obtained by GPS is used as the input signal and passed to the IMU. The IMU is then connected to the controller via a serial port to obtain higher frequency positioning results.
Principle of IMU
When we return home at night and find that the power is off, we cannot see anything in the dark, so we have to walk very carefully and constantly touch the surrounding objects (such as the refrigerator) to determine our position based on our own experience.
The principle of IMU is similar to walking carefully in the dark.
In the dark, due to errors in our estimation of stride length and actual distance walked, as we take more steps, the difference between our estimated position and actual position becomes greater and greater.
As shown in the figure below.
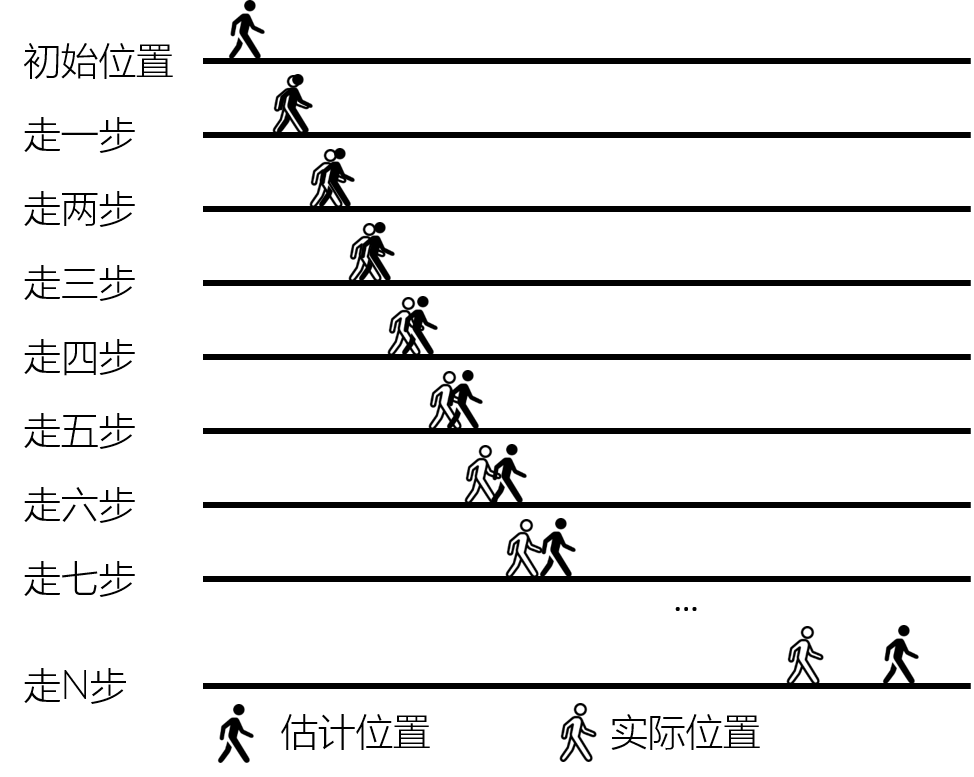
When taking the first step, the estimated position (where the black person is) is still relatively close to the actual position (where the white person is), but as the number of steps increases, the difference between the estimated position and actual position becomes greater.
The little person in the picture only moves in one direction, which is one-dimensional. When this method is generalized to three dimensions, it becomes the principle of the inertial measurement unit.
The academic language is: based on Newton’s laws of mechanics, by measuring the acceleration of the carrier in the inertial reference frame and integrating it over time, and transforming it into the navigation coordinate system, we can obtain information such as velocity, heading and position in the navigation coordinate system.
Characteristics of IMU
From everyday phones to missiles and spacecraft, IMUs are used at different cost and accuracy levels.According to different usage scenarios, different precision levels are required for IMUs. High precision also means high cost.
The precision, price, and usage scenarios of IMUs are shown in the following figure.
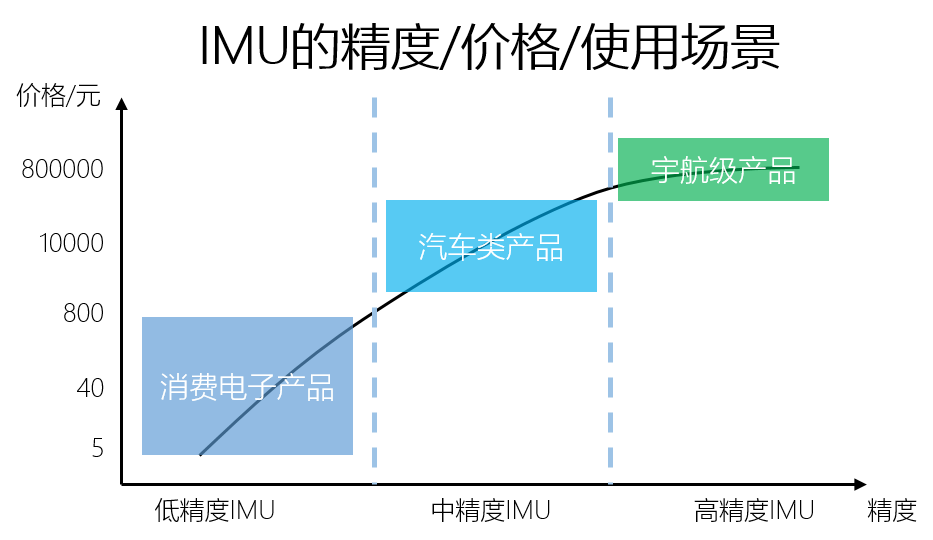
As shown in the figure, the IMUs used in ordinary consumer electronic products are low-precision and very inexpensive IMUs, which are widely used in mobile phones, smart watches, and are commonly used to record the number of steps walked.
On the other hand, the IMUs used in unmanned driving range in price from hundreds to tens of thousands of dollars, depending on the requirements of the unmanned driving car for positioning accuracy.
High-precision IMUs are used for missiles or aerospace aircraft. Taking missiles as an example, from launch to hitting the target, the aerospace-grade IMUs can achieve high-precision calculations with errors even less than one meter.
In addition to the characteristics of precision and cost, IMUs also have two extremely critical characteristics. One is high update frequency, and the working frequency can reach more than 100 Hz. The other is high calculation accuracy in a short period of time, without a significant amount of error.
In our previous sharing about GPS, we mentioned that the positioning frequency of GPS is only 10 Hz. The two characteristics of IMUs can just make up for the shortcomings of GPS, forming the golden combination of positioning.
Golden Duo: GPS + IMU
Going back to the story at the beginning. When you go back home at night, you find that there is a power outage, and you can’t see anything in the darkness. You can only take small steps and constantly touch the surrounding things (such as the refrigerator) to determine your position with extreme caution based on your own experience.
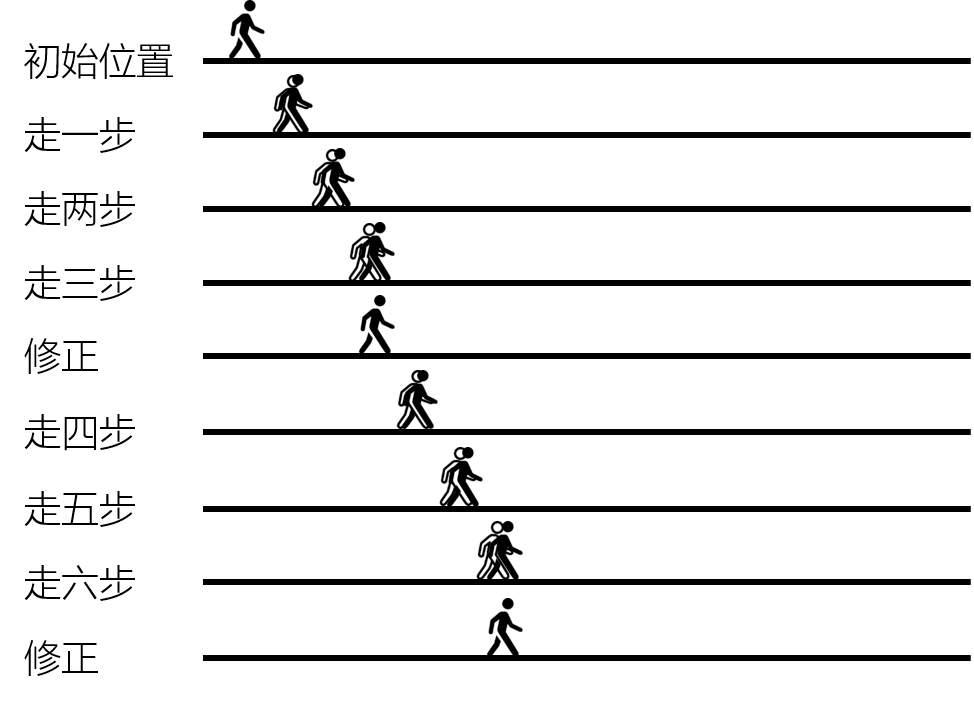
In this process, the function of GPS is similar to the correction of your position after you touch something. The function of IMU is similar to taking small steps and calculating your position without relying on the ground.
Continuous correction and calculation can ensure relatively stable positioning. As shown in the following figure.
In unmanned driving systems, the update frequency of GPS is generally 10 Hz, and the update frequency of IMU is generally 100 Hz.
When the two sensors work together, they can provide a positioning output of 100 Hz. The following is the principle diagram of data fusion of the two sensors.
GPS + IMU data fusion principle diagram
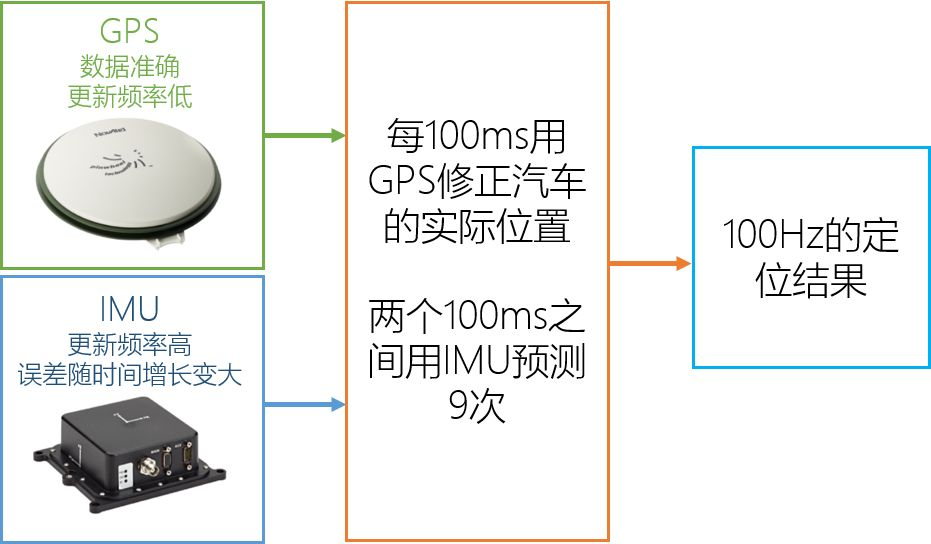 The processing flow of information in the controller software for GPS and IMU signals is similar to the diagram below in terms of time dimension. During the 0-100ms cycle, the IMU is used for nine position estimations, and when new GPS location data is received, it is corrected to achieve a high-frequency positioning result.
The processing flow of information in the controller software for GPS and IMU signals is similar to the diagram below in terms of time dimension. During the 0-100ms cycle, the IMU is used for nine position estimations, and when new GPS location data is received, it is corrected to achieve a high-frequency positioning result.

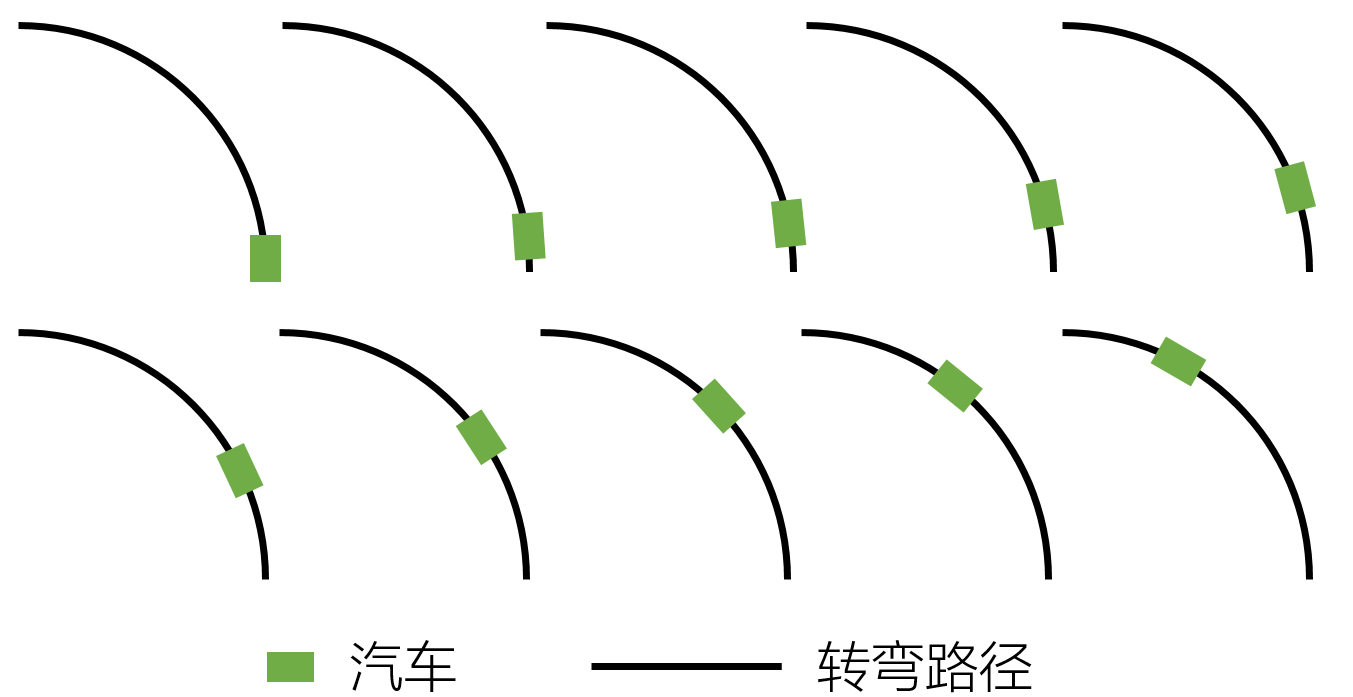
With a stable 100Hz positioning result, the unmanned vehicle can maintain a high-frequency positioning and control, as shown in the figure below while solving the problem of path following. For each small step taken, the steering angle is recalculated to control the unmanned vehicle to travel along a predetermined trajectory.
Summary
The above sharing introduces the basic principles of IMU using simple examples in daily life, discusses the characteristics of IMU (precision, cost, frequency), and explores how GPS cooperates with IMU to complete the positioning function of unmanned vehicles.
Having solved the biggest problem of unmanned vehicles, “Where am I,” it is time to discuss the problems of “Where do I go” and “How do I get there.”
Therefore, in the following sharing, I will focus on introducing perception-related sensors (cameras, LiDAR, etc.).
Well, this sharing basically lets everyone understand the technology related to unmanned vehicle positioning.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.