I have always wanted to track the software development progress of global automotive companies, and a good starting point is to look at the electronic and electrical architecture and the corresponding software function distribution, as well as the progress of software development based on SOA. Recently, I came across two materials shared by BMW at the IEEE Ethernet Annual Conference:
-
“AUTOMOTIVE MACSEC ARCHITECTURE” by Dr. Oliver Creighton & Dr. Lars Völker
-
“FROM VEHICLE CENTRIC TO PEOPLE CENTRIC HOW THIS TREND IS CHANGING VEHICLES E/E ARCHITECTURES” by G. Smethurst
The main conclusions are as follows:
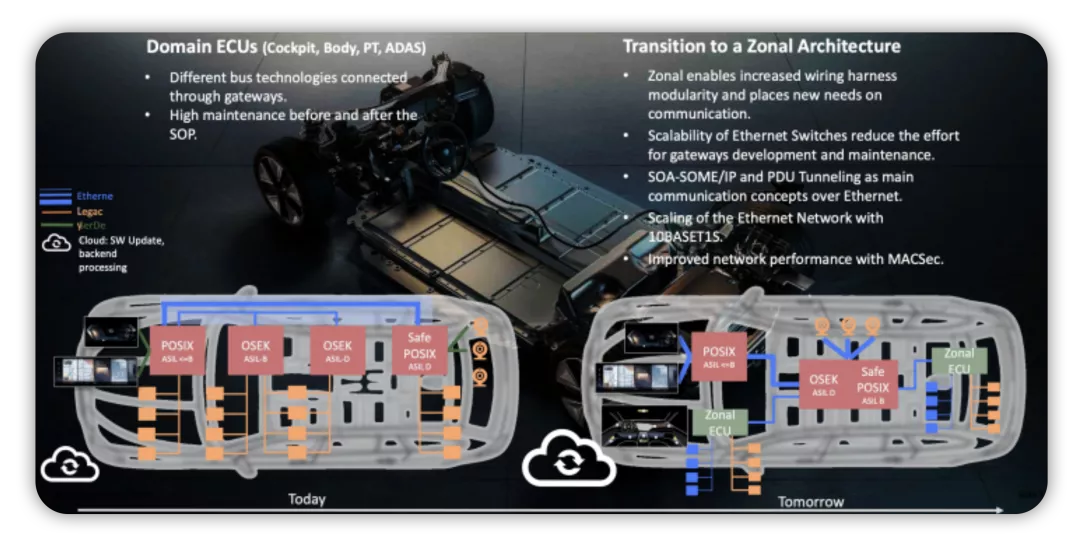
- BMW is also rapidly transitioning from Domain to the next Zonal architecture. From this architecture, the overall system based on the cabin has not changed. The cabin based system and autonomous driving system are two blocks that form the entire system framework, with the Zonal ECU being imported in advance.
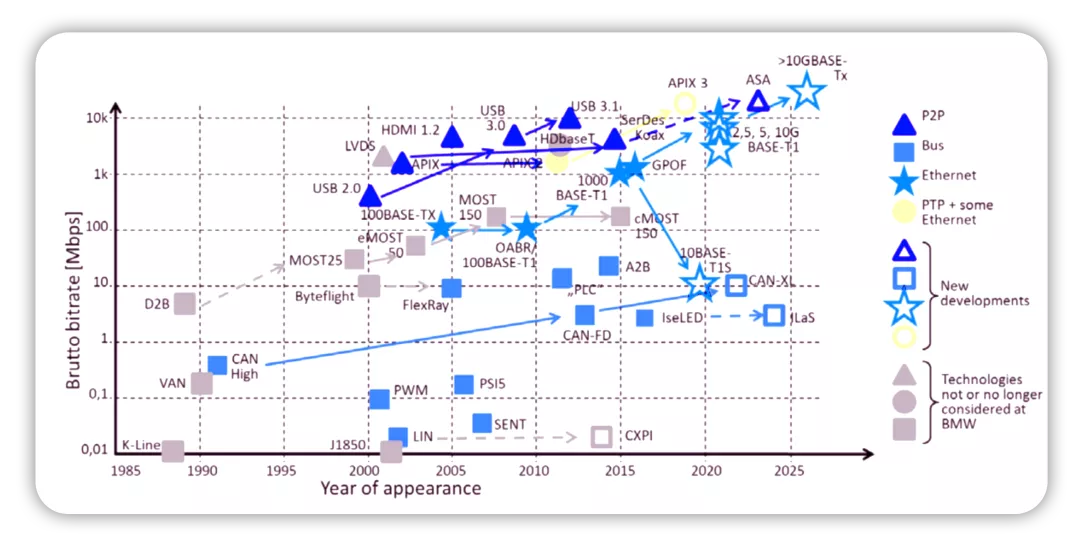
- In terms of communication architecture, APIX3, ASA, and 10GBase Tx are under development, and the next main evolution includes CAN-XL, ILAS and 10BASE-T1S. I plan to spend some time on these in the future.
Why has distributed architecture been the mainstream in the past?
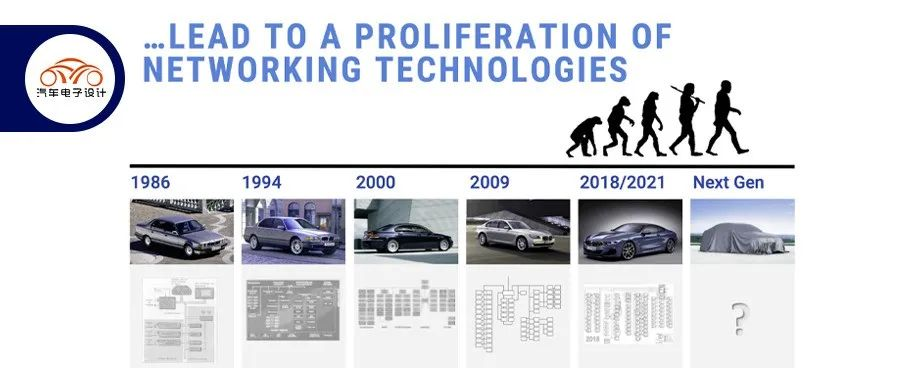
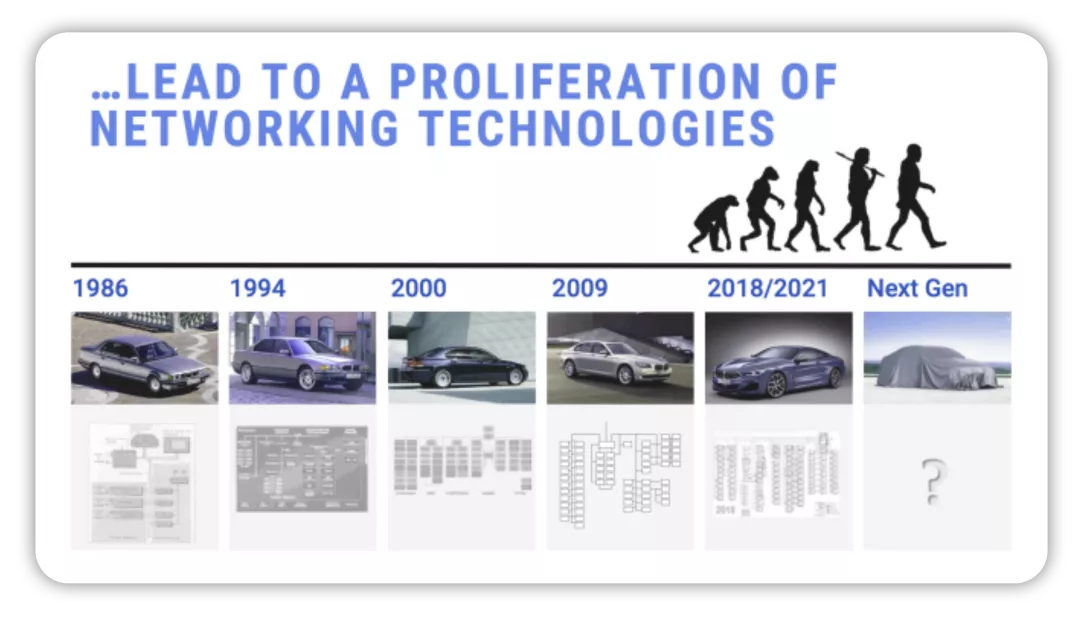
From the perspective of the content added by BMW in 2020, the series’ software requirements increase is the main driving factor for architecture upgrades.
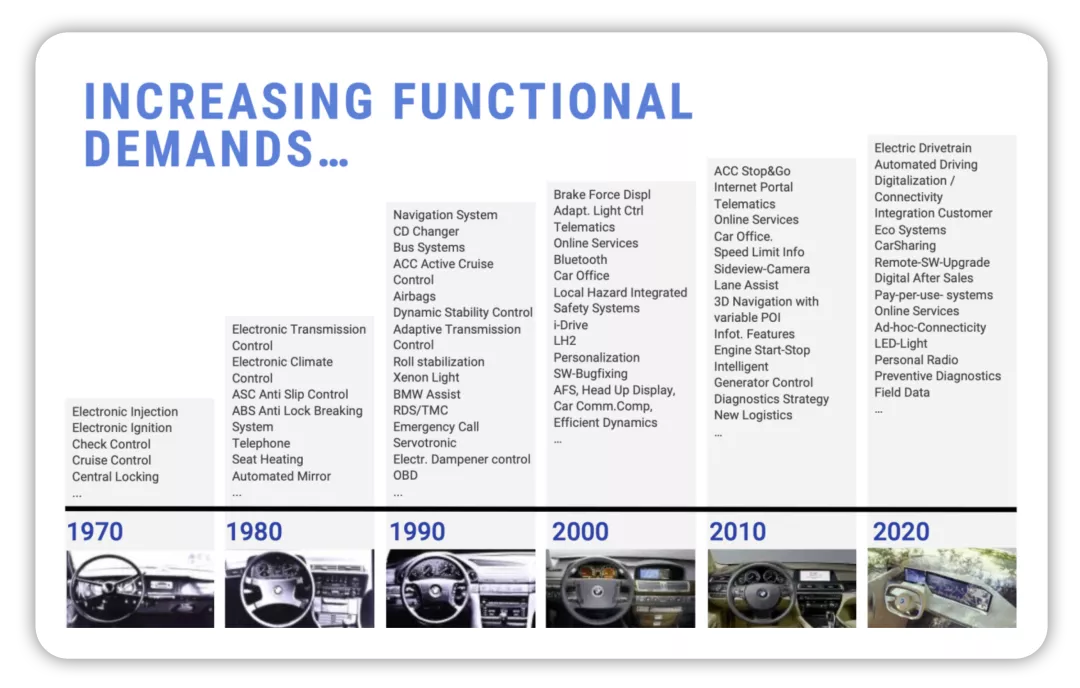
Here, the objective is to ensure both safety and expandability, so BMW can expand up to 63 ECUs on the 7 series – the complexity lies not only in testing the standard features but also the various optional functions. BMW’s previous attempts in the domain control of car body parts has reached a bottleneck.
Several optional paths for future architecture
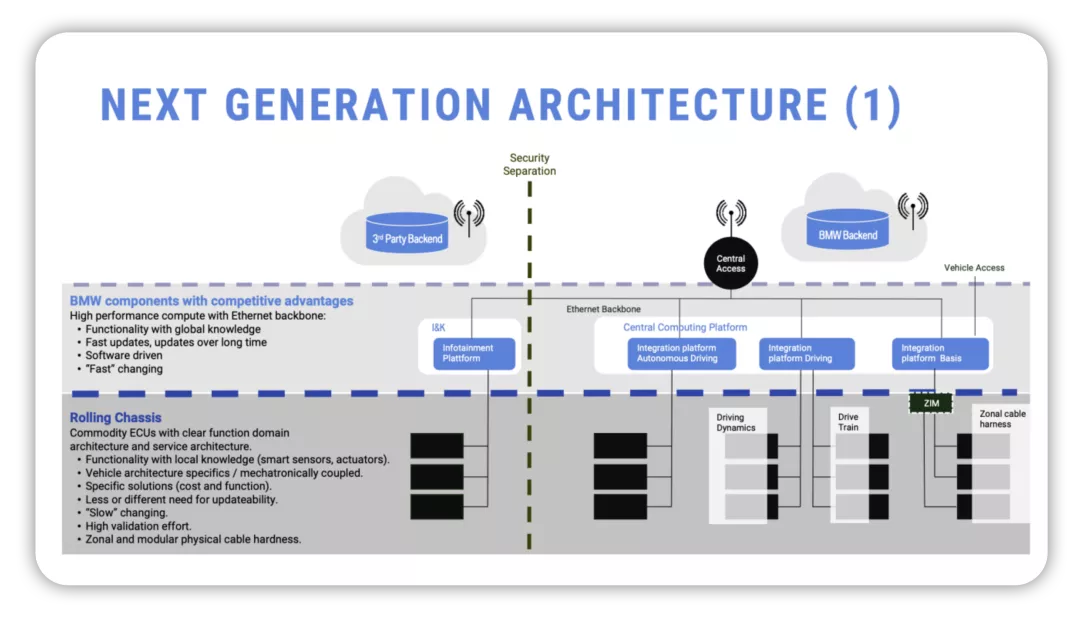
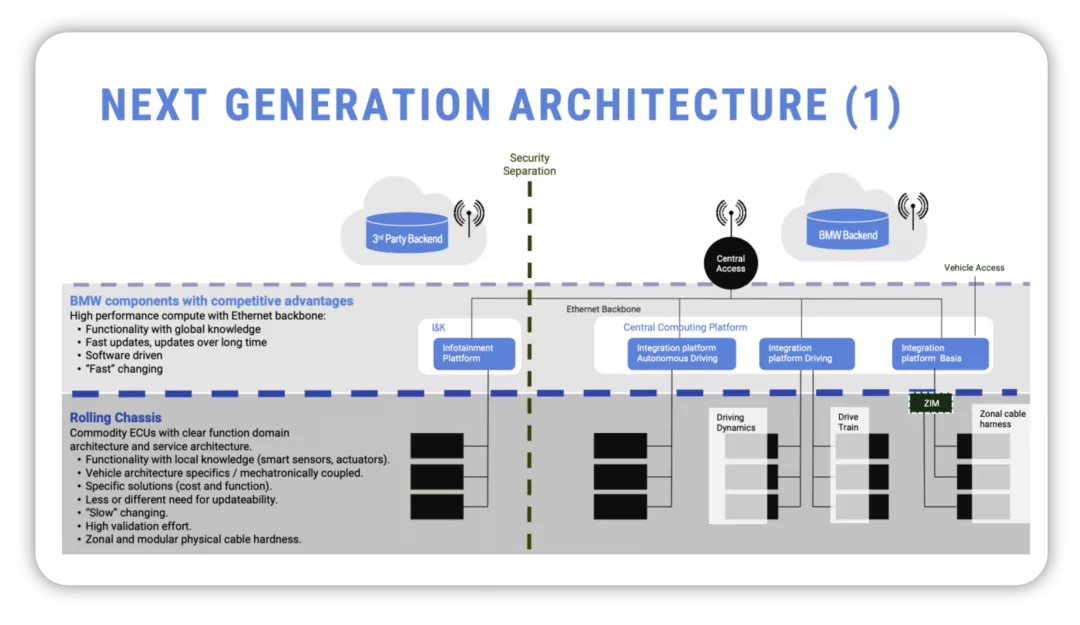
Currently, modules that change quickly mainly focus on the information entertainment platform and the core computing platform – software drivers is the main mode of the next generation of software-defined cars. According to BMW, their software is divided into two parts: autonomous driving and driving platforms (including the powertrain) and the basic platform for the original car body.
The slower part mainly includes traditional ECUs. These are connected through zonal controllers, which require verification with modular cable connections, taking a significant amount of time since the software is relatively solid once it is released. Car companies themselves are not concerned about the software development capabilities in this area. With the separation of the two parts, BMW and Qualcomm’s cooperation in the import of the entire digital chassis, there is believed to be a lot of room for evolution in the fast-changing area.
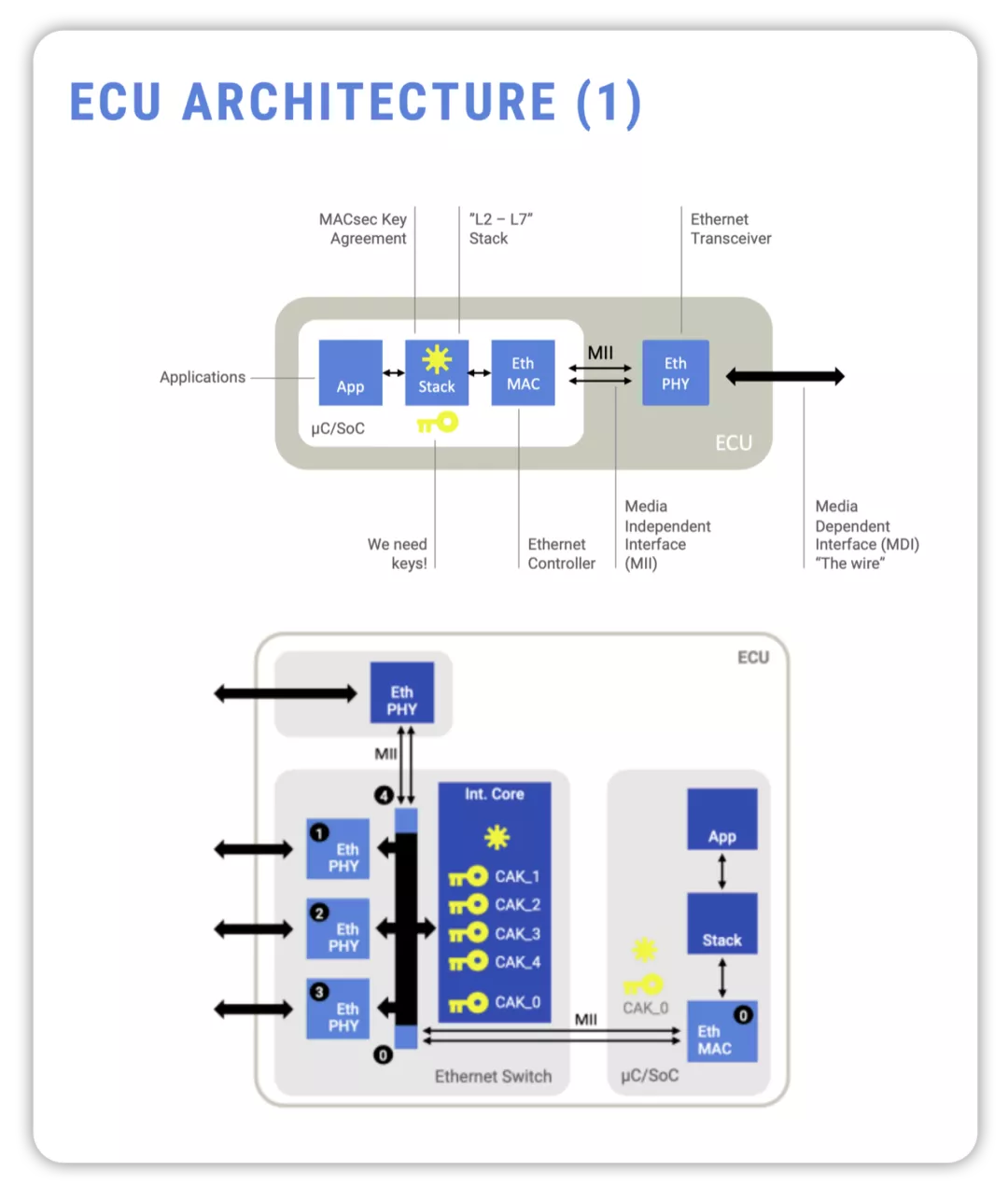
The zonal controller is configured with different lower-level ECU modes, mainly considering the safety of networking, as shown in the figure below.
In summary, I believe that for a considerable period of time, cars will be developed with edge computing. The next generation of ECU will mainly enhance information security, with little increase in ECU functionality.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.