
Just like all other car owners, after the release of the GAC NE Aion S on April 15th, I eagerly paid a deposit of 5,000 RMB for this domestically produced pure electric estate car with exceptional configuration and performance.
Just like all other car owners, when I heard that the GAC NE Aion S uses a 400V electrical platform with two electric motor options from Japanese Denso and China’s Weirui, and two battery options from CATL and Weirui, I became concerned and puzzled:
- Is the Weirui motor, with a lower declared torque and RPM, inferior to the Denso motor in terms of performance?
- Why didn’t the GAC NE Aion S use an 800V electrical platform?
These issues have generated much speculation and discussion in car owner groups and communities, but I have not seen any clear and in-depth technical analysis.
So, when I had the opportunity to communicate one-on-one with Li Mingyuan, the originator of the SEA Haohan architecture and chief engineer of the new energy development platform, I immediately began to ask him these questions and satisfy my curiosity. In addition to getting answers, I also hope to have a more comprehensive and in-depth understanding of the three-electricity system of the GAC NE Aion S.
The actual interview contains a lot of information, but since this article focuses mainly on technical aspects, it may be relatively dry and requires some technical knowledge.
The most concerning issues
Clarifying Weirui and Denso
The first issue concerns the Weirui and Denso electric motors. At the GAC NE Aion S launch event, the peak torque of the Denso motor was published as 384 Nm, while the peak torque of the Weirui motor from the MIIT (Ministry of Industry and Information Technology) was reported as only 343 Nm. Many users’ initial reaction was that the GAC NE Aion S motor was underpowered.
GAC NE has given a brief explanation in their official response: the final wheel-side peak torque of both motors in GAC NE Aion S is 3840 Nm, and the acceleration time from 0 to 100 km/h for the dual-motor version is 3.8 seconds.
However, this still leaves some questions unanswered.
Question: If the torque at the wheel for the Weirui motor is the same as the Denso motor, despite having a lower maximum torque rating, the gearbox ratio may need to be adjusted for torque amplification. Once the gearbox ratio is changed, it may affect the final top speed of the vehicle. Under such circumstances, is it possible for the Weirui motor version to achieve a top speed of 200 km/h?
Li Mingyuan:We need to consider two parts of this issue. First, the GAC NE Aion S target of 3.8 seconds for 0-100 km/h acceleration is determined through simulation calculations and a complete powertrain system analysis. This process includes factors such as wheel slip at launch, the vehicle’s rear-biased weight distribution during acceleration, and the lifting effect on the front of the vehicle due to the increased angle of attack when the weight is shifted, etc. The maximum peak torque of 3840 Nm is the result of such calculations.After obtaining the data from the wheel end, we need to calculate backwards the torque of the wheel end of 3840 N·m, step by step to obtain the required torque for each level of the transmission system, including the half shaft, the cage, the output shaft, and finally the torque at the electric drive or gear reducer end. Then, how to achieve it in the electric drive system?
To meet the requirement of 3840 N·m wheel end torque, our suppliers offer two types of motors with different technologies and strategies. The motor with a larger peak torque has an earlier torque constant inflection point, while the one with a smaller peak torque has a larger torque in the higher speed range. The power of both motors is 200 kW, and they need to achieve the same physical requirements, and their wheel end power is also the same.
But why are there differences between them? This is because the designs of their stators and rotors are different. Now people care about whether the stator uses flat or round wire, but the most important thing in the motor is the stator design. Although the pole pairs in the stator are the same, different stator designs will result in different reverse electromotive forces, which is a safety requirement for the whole vehicle, and users will not know about it.
However, the safety requirement for the reverse electromotive force is achieved by a certain ratio, which leads to the fact that the two companies will choose how to achieve it. So one company adopts an electromagnetic scheme A, while the other adopts an electromagnetic scheme B. One is more suitable for flat wire and the other is more suitable for round wire. The one with the round wire achieves a slightly higher reverse voltage but still meets our safety requirements and achieves 384. The other also meets our requirements, but it is based on flat wire and can be optimized for the entire cost and efficiency to achieve 343. However, the range of mechanical adjustment for the gear reducer is much greater than that of the electromagnetic scheme adjustment of the motor, so they choose (gear ratio) n1 and n2 to finally achieve the same torque output in the electric drive system.
 Our maximum declared rpm, whether it is 16,500 rpm or higher, is a value that we can achieve. However, we no longer easily increase the rpm because the entire half shaft motor requires a seal to perform corresponding sealing. If the bearing rotates too fast, the torque and rotational speed that the bearing can withstand will have a linear speed requirement. If the linear speed surpasses this requirement, the bearing aging will accelerate significantly and the oil film inside the bearing will not be able to withstand the pressure. Therefore, in this situation, we will make a comprehensive consideration. However, overall, as long as the entire vehicle can reach 200 km/h at the wheel end, the Weir motor can also achieve 200 km/h. We do not pay too much attention to the motor’s value as long as it meets the requirements of the entire vehicle.
Our maximum declared rpm, whether it is 16,500 rpm or higher, is a value that we can achieve. However, we no longer easily increase the rpm because the entire half shaft motor requires a seal to perform corresponding sealing. If the bearing rotates too fast, the torque and rotational speed that the bearing can withstand will have a linear speed requirement. If the linear speed surpasses this requirement, the bearing aging will accelerate significantly and the oil film inside the bearing will not be able to withstand the pressure. Therefore, in this situation, we will make a comprehensive consideration. However, overall, as long as the entire vehicle can reach 200 km/h at the wheel end, the Weir motor can also achieve 200 km/h. We do not pay too much attention to the motor’s value as long as it meets the requirements of the entire vehicle.
Therefore, the parameters reported this time make users feel that there are differences due to higher rpm and greater torque. We did not anticipate this either. As you know, the maximum vehicle speed or wheel-end rotational speed is the same. Naturally, the requirement for high rpm will be higher as a result, so the design of the entire seal and bearing speed limit will also require higher standards. However, if we only talk about the higher rpm, will its higher reduction ratio affect its maximum speed? My answer is no. Because the highest rpm must meet 200 km/h and this 200 km/h is not achieved once, but has a certain proportion in the entire life cycle. We need to check the entire fatigue and stress according to this proportion before we can say that this electric drive has passed our requirements.
Comparison diagram
To help you understand the concept of the differences in the electric drive part mentioned by Dr. Li Mingyuan, we have also created a rough schematic diagram later.
The power (W) of the motor is directly proportional to the product of the torque (T) and rotational speed (n). In the constant torque range of the motor, the output power of the motor theoretically linearly increases with the increase of the motor speed n.
However, the linear increase in power is not endless. When the motor speed rises to nb, the motor reaches its maximum power. After that point, theoretically, the power of the motor will not increase with the increase of the speed, but maintain a relatively constant value. In actuality, the power of the motor can even gradually decrease due to various physical reasons as the speed continues to rise after exceeding nb.
As a result, when the output power is constant, or even decreases, while the speed continues to rise, the output torque of the motor will drop in a curve after the speed exceeds nb. This trend will continue until the motor reaches its maximum speed.
The on-board Japanese Denso and Weir electric motors on the Extreme E Odyssey 21 are represented by the subscript “1” and “2,” respectively, in the schematic diagram.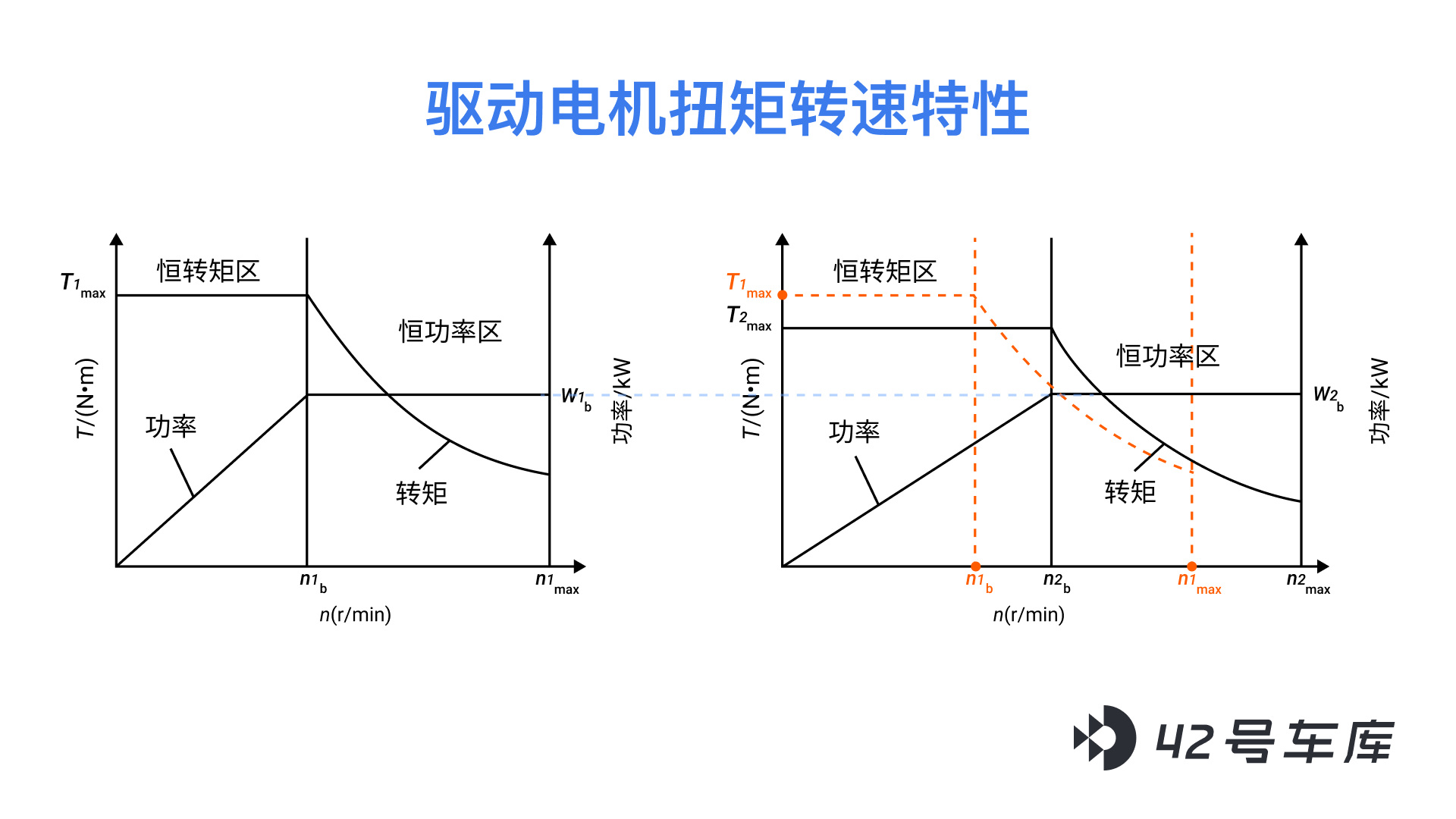
The peak torque T1 max of the Japan Servo Motor is larger, but the constant torque region ends at a lower speed n1 b. The peak torque T2 max of the Weir Motor is a little smaller, but the constant torque region ends at a later speed n2 b. Beyond the constant torque region, the power output of the two motors is almost the same because their maximum power is both 200 kW.
However, at the wheel end, in order to obtain the same torque, the gear ratio of the reducer in the Weir electric drive system is higher than that in the Japan Servo electric drive system, resulting in an increase in torque and a decrease in the speed range under the premise of unchanged power. Therefore, after adjustment, the final output curve of both electric drive systems is basically consistent for the entire design working condition, not just the peak torque. The performance of the Polestar 001, which uses different motors, is also consistent in zero-to-hundred acceleration and top speed.
Why not 800 V?
Another issue that everyone cares about regarding the Polestar 001 is that the SEA architecture can create an 800 V electrical platform, but the Polestar 001 still uses a 400 V electrical platform. After discussing the differences between the Weir and Japan Servo motors in terms of torque, speed, and stator, I talked to Dr. Li Mingyuan about this issue.
Question: The Polestar 001 uses a 400 V platform, and the newly deployed Polestar Charging Stations all use high-current schemes. So, I have two questions: first, why didn’t you make an 800 V platform? Second, after the 800 V car is released later, can charging stations based on the high-current approach fully exploit the advantages of those 800 V platforms?
Li Mingyuan: To create an 800 V system, not only the battery, but also the electric drive, control voltage, PTC, and DC/DC all need to be adjusted accordingly. This will result in a very wide voltage range. Now, we make our own electric drives and 800 V is no problem. I can increase the number of battery cells to make an 800 V platform, but the real problem with 800 V is that the cost of the entire component and the current supplier chain system is incomplete. For example, what do we do with the air conditioning compressor? Very few OEMs would make air conditioning compressors themselves. As a variable load device, if it needs to be satisfied both at a high SOC and a low SOC, and meet regulatory requirements like defrosting, defogging, it is hard to accomplish.Question: So the main constraint now is still the incomplete supply chain, which cannot meet the low-cost mass delivery of 800 V components, right?
Li Mingyuan: Yes, there is also a concern about the charging adaptation of the 800 V system. There are still some 500 V charging piles on the market. If it is an 800 V platform car, 500 V piles may not be compatible and there will be more limitations.
800 V technology is good. What we are thinking is to ensure that we meet the delivery dates promised to mass users, and avoid supply chain issues. Good things will definitely go up in technology, just like solar energy, which has also gone up to 1200 V. So it is also a comprehensive consideration.
There is no problem with the compatibility of the current supercharging for subsequent 800 V models. The pile is an attribute of the matching architecture. So, when the parameters of the piles are disclosed, we can see that the piles are compatible with the architecture and the car.
Question: Can we make the guess that if we use a high current scheme now, if there are models like the Jiayue 003 or Jiayue 005 in the future, which have 800 V architecture, will their charging power be different?
Li Mingyuan: Charging power mainly depends on a value, the charge and discharge rate of a single cell. If a single cell is a 200 Ah battery with a 2.5 C rate, it means a current of 500 A. This 500 A current is not for the whole vehicle, but for each battery cell. This statement is valid both for 400 V and 800 V systems, so what we need to pay attention to is whether the battery cells can achieve high-rate charging, rather than whether they are 400 V or 800 V systems.
Question: But now we have observed a phenomenon from the models that have been launched, that cars with high-voltage electrical platforms seem to have less decline in charging power at high power levels?
Li Mingyuan: This depends on the charge and discharge rate window of the battery cell. If the cell matches the development of the entire pile end capability, and the OEM has the strength to adjust the chemical system in advance, this can bring out the power of the pile end. But currently, everyone is doing it at the battery cell level, simply doing high-rate charging. At this time, whether it is 400 V or 800 V, it must face temperature control at the most fundamental level of the battery cell.## Translation in English
Here is the Markdown text translated into English with HTML tags preserved using a professional approach.
“`
For example, suppose we have a 200 kW charging rate, where 400 V is 500 A, and 800 V is 250 A. Although these values differ, it is important to note that the 500 A and 250 A both refer to the entire system’s incoming current. However, if the number of battery cells in series differs between 400 V and 800 V, where 400 V uses 100 battery cells and 800 V requires 200 cells, both will yield the same result of 500 A for 200 cells and 250 A for 100 cells. This means that the safe charging and discharging rate of battery cells is what we should pay attention to when looking at charging properties.
Q: One concern for users is that some third-party charging stations still follow the old GB standard with a current limit of 250 A, so the high-voltage platform is undoubtedly superior in terms of charging power. What is your view on this?
Li Mingyuan: Fast charging is a very precise and dangerous process. Fast charging requires a thorough understanding of the characteristics of battery cells, temperature, SOC, and all voltage difference standards. This is why we have to do fast charging on our own charging stations.
Because the battery pack is a passive component, it’s the most difficult thing for the car and the charging station. In DC fast charging, when I establish a fast charging connection, if I cannot charge, I am at a loss. The charging station keeps pushing electric current into me, and I am in danger. At this point, if you want to forcibly pull the relay, the relay cannot handle such a large current and it must burn the fuse. I cannot bear such a loss, so let me do the fireworks switch or burn the fuse actively.
So I hope that when there are fluctuations in the current control on the charging station or any other situation, I still have leverage to withstand it and tell the charging station to scale it back. This is the mutual trust between me and the charging station. So it’s not that we cannot use it, but for safety reasons, I believe that other electric vehicle manufacturers have the same considerations, and everyone has to build their own charging systems. Only with our own charging stations can we truly and confidently do fast charging, because if there is an accident, no one will say that the charging station is bad; instead, it’s the car that isn’t good.
Previously Unexplored Topics
In addition to the above-discussed topics, I also had an in-depth discussion with Dr. Li Mingyuan on other technical settings related to the Zeekr 001 based on my own experience of owning an electric car, including:
- Motor efficiency
- Kinetic energy recovery
- Considerations for dual motors
- Energy consumption and thermal management
- Battery pack and rear seat space
Motor Efficiency
Q: How is the coverage of the high-efficiency range on the graph of motor efficiency with respect to its speed and torque? What optimizations have you made for Zeekr 001 to achieve high energy efficiency?
Li Mingyuan: The graph of motor efficiency with respect to its speed and torque has a maximum point, 97.86% is the value we have disclosed, but this point is only limited to the inside of the motor, and it has not reached the wheel end, right?
Li Mingyuan: Yes, we didn’t reach the wheel-end, because the engagement of the wheel-end gearbox itself corresponds to NVH. We have done a lot of optimization for NVH now. Also, the output angle of the whole half shaft cage will affect efficiency.
But the losses in these areas are quite similar, and the difference is similar to the difference between 97.86\% and 97.53\% with electric drive. The decimals after two or three digits don’t matter. What I am more concerned about is how the users drive. Users may drive like this, in the low torque area to a certain speed, and then recover energy here, which we call a cloud chart. The point I am concerned about at the end is whether I can lower the efficiency of the motor.
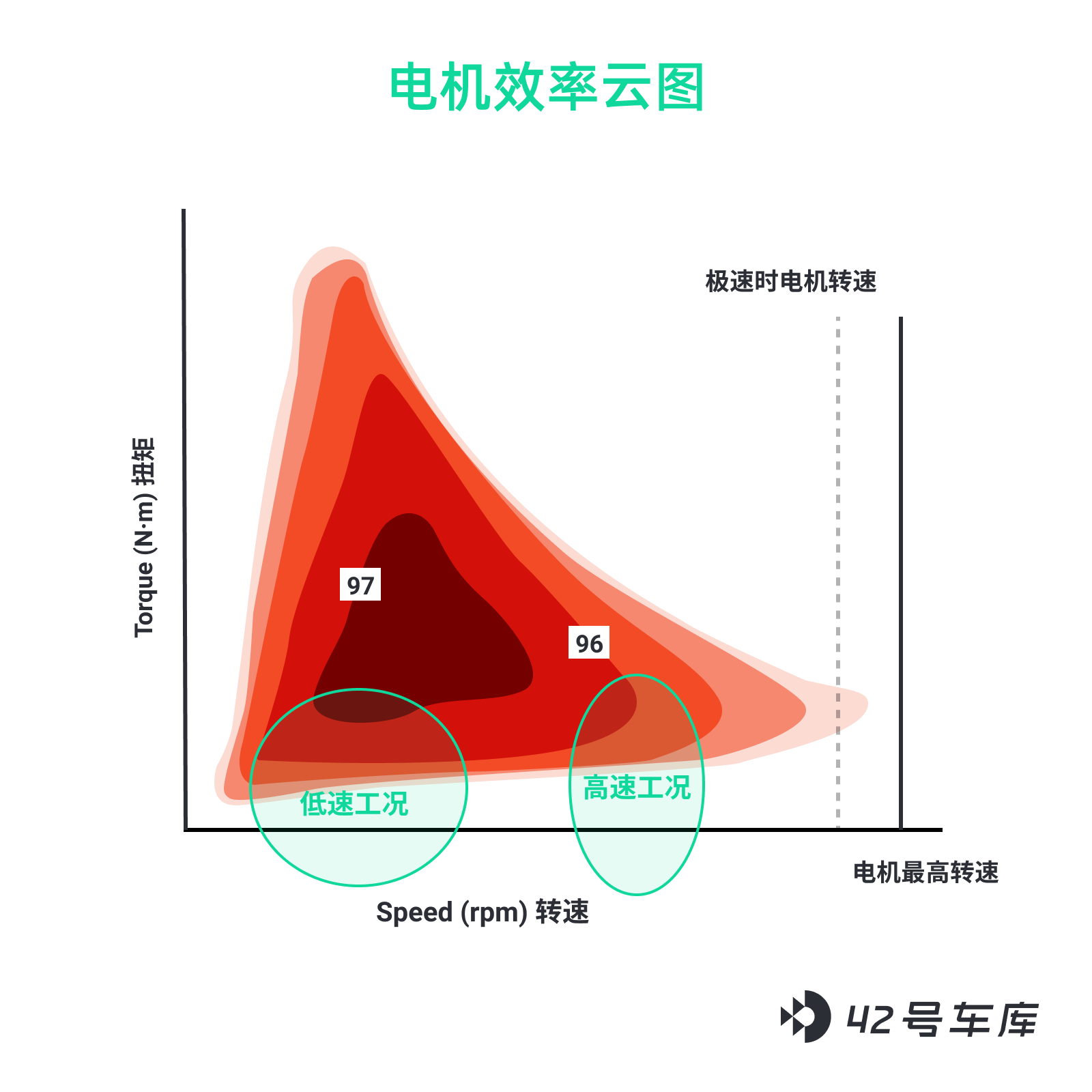
When we were discussing in the industry association, there was a saying in China about the proportion of the efficient area, such as this line is 80\% or 85\%, which accounts for more than 85\% of the entire graph (torque range and speed range proportion), which looks good on ‘double 85’ but is not practically significant, because although this area is the largest, users don’t drive in this area most of the time. Users actually drive in the bottom-left part, so we need to move this graph to the bottom-left corner. So all our work now is to find a comprehensive point, because this comprehensive point has two types, one is for the city, which is at the bottom-left, and the other is for the highway, which is at the bottom-right. Therefore, this is contradictory per se. In China, we try to suppress the efficient area and do our best to balance it. We actually have our own know-how, and I will set how users drive. For example, for the Geely Icon, 50\% of users may drive like me, commuting between two cities every week, working in one city and living in another, mainly driving in the city. But on legal holidays and annual leave, they return to their hometown where there are highways. We set a proportion of X+Y+Z, which includes driving in the city, on the highway, and the city loop. Some people may have special driving needs, and all these considerations are weighted together, which is my requirement for the whole vehicle.
Q: The issue you just talked about, I am more interested in the weighted calculation. Did you make this assumption based on user surveys or consulting other data?Li Mingyuan: We have two aspects. On one hand, as a traditional automaker, we have accumulated data. On the other hand, electric vehicle users are concentrated in first- and second-tier cities, and their usage habits differ from those of traditional vehicle users. This part of the work is mainly done by me. After this part of the work is completed, the efficiency point, working point, temperature rise, service life, and quality are basically determined, so this part of the work is the core of the automaker, predicting how users use their vehicles and making cars accordingly.
This know-how may not be publicized, but it is the most important thing. The reason why foreign automakers are doing well is that they have accumulated data. For example, the driving habits of BMW users and Mercedes-Benz users are different. With this accumulation, BMW continues to move in its own direction, and users increasingly prefer it, just like Daimler. Traditional automakers in China have already begun to accumulate data for traditional vehicles, but little thought has been given to electric vehicles. When communicating with other suppliers, few automakers have done this. Geely, as a traditional automaker, has the advantage of being able to absorb this, which is my thinking regarding efficiency and overall system design. However, the specific proportion for each automaker’s know-how is different.
Question: What is the total weight of the two electric drives?
Li Mingyuan: We have not disclosed specific numbers yet. The two electric drives have different designs, so there will also be differences in weight. The Japanese-made electric motor has an additional oil pump because it is oil-cooled, and there is oil in the oil tank, so it will be slightly heavier. The reasons for these differences are multiple, so we will also avoid disclosing these numbers that may cause users to doubt.

Calibration of Energy Recovery
Because the public test drive has not yet been developed, the setting of energy recovery for Polestar 1 is also a concern for many owners. Some users who have just transitioned from a fuel vehicle will hope to have as little or no kinetic energy recovery as possible, while as an electric vehicle user, I would prefer a high and linear kinetic energy recovery. I also discussed this issue with Dr. Li Mingyuan during the interview.
Question: Regarding energy recovery of the electric motor, the higher the counter electromotive force, the greater the power of energy recovery can be achieved. Is that the case?
Li Mingyuan: Not necessarily. The counter electromotive force is related to the number of coil turns and magnetic flux, as well as the number of poles. If the counter electromotive force is already higher than the electromotive force at the busbar end, I need to give a current to suppress the counter electromotive force at the motor end. Press down on this field.而这边的话一般正常的场区,我不用专门去压抑它的反电动势,这也是我要求供应商把反电动势要做到一定范围内。所以反电动势还有一个问题就是安全,反电动势过高,如果一旦电机这边控制出现任何问题,就无法保证安全。这个用户不太会考虑到,但这是我 95\% 的工作,我考虑的都是如果车出问题了怎么办,如何去保证安全。如果车出现问题,反电动势过高它会倒灌电池包,这个就不行。反电动势不能一概而论,但是总的来说反电动势高的话,那说明它对磁铁的利用很高。但是,它相应的在弱场区高速的时候需要提供更大的能量来抑制这个场强,然后再把电流给罐进去,然后形成整个动力输出。
Question: I feel that the Model 3’s kinetic energy recovery rate is high when driving normally. Even at low speeds, it is still available, and the switch between kinetic energy recovery and braking is seamless. Does the Zeekra 001 have any noteworthy settings for kinetic energy recovery?
Li Mingyuan: The maximum energy recovery we have achieved can reach -0.3G, and we can achieve -0.3G at any speed range, which will provide a good consistency in terms of perception.
Question: When I test drove the Zeekra 001 before, even when I set the energy recovery to the highest, the deceleration effect still seemed relatively conservative, and it shouldn’t have reached -0.3G.
Li Mingyuan: It was set to -0.15G at that time, and now it is -0.18G.
Question: -0.15G is available, but for users like me who are used to driving electric vehicles, it still doesn’t feel like enough. When I release the accelerator pedal, there is a certain delay in the Zeekra 001’s kinetic energy recovery intervention. In fact, when following dynamic traffic, such pedal delay requires me to have more anticipation in my driving input, and the driving response may not be as timely.
Li Mingyuan: We considered its (intervention delay) time processing and electric drive capability at that time, but we also considered it as the second driver, which is the comfort of the human driver. Most of our users may not be experienced electric vehicle owners, unlike you who are very familiar with them, so we hope that more people can experience or accept our high energy recovery while maintaining comfort.
Question: I remember that there are four levels of kinetic energy recovery settings for the Zeekra 001, and I think that there can be differences in intervention delay between different levels of kinetic energy recovery, in addition to the difference in maximum deceleration force. The intervention delay for high-level kinetic energy recovery can be lower.
Translate the following Chinese text in Markdown format to English Markdown format, in a professional manner, while retaining the HTML tags inside Markdown. Only output corrections and improvements, do not write explanations.
Also, regarding the single pedal mode for electric cars, although most cars do not have a low-speed creep, some car manufacturers use motor braking only in the final stage, without brake intervention. Therefore, without stepping on the brake, the vehicle will not come to a stop. Tesla’s “Stop Mode” can automatically decelerate to 0 and apply the parking brake. What do you think about these two settings?
Li Mingyuan: We can look into this later, you made a good point. We need to differentiate between the expectations of users who choose high energy recovery. However, regarding the ability to come to a complete stop by slowly braking, we tend to favor Tesla’s approach (applying the parking brake after stopping). You can try it out later.
Considerations for the Dual-Motor Model
Q: The solutions for dual-motor models differ among manufacturers on the market. Double asynchronous motors are now rare, with the main options being double permanent magnet and one asynchronous and one permanent magnet electric motor. What was the consideration for using two permanent magnet motors in the AK-47?
Li Mingyuan: The power density and energy consumption of a permanent magnet motor are better than those of an asynchronous motor. Some overseas electric vehicles use asynchronous motors, partly because the rare earth resources in permanent magnets are mainly in China. To avoid being controlled by China in the electric vehicle industry chain, they tend to use asynchronous motors more conservatively. However, the control of asynchronous motors is more complicated, and if not resolved properly, there may be acceleration delays caused by the sleep state of asynchronous motors.
Since we are a Chinese company, there is no restraint in using permanent magnet motors, and on both efficiency and power density levels, we are more inclined towards permanent magnet motors.
Q: OK, the choice of permanent magnet is clear now. Then, what is the reason for using two permanent magnet motors?
Li Mingyuan: You are talking about the one that follows the front axle.
Q: Yes, is there a decoupling design for the front motor in terms of driving?
Li Mingyuan: No. Of course, we know that for permanent synchronous motors, I need a little bit of power to remove eddy currents when following along. This is what we call 0 N·m control. The important benefit of 0 N·m control is that the power response is fast, and torque can be provided at any time. That means, as soon as the front or rear axle slips a bit, I don’t need any hesitation, I can apply power from the front motor to take the vehicle out.
Q: So the power is always in the preparatory state.
Li Mingyuan: Yes, so our full-time four-wheel drive is much faster than mechanical systems. Because for this car, our ultimate performance is safety, as well as some driving pleasure. When entering and exiting turns, the real-time allocation of torque to the front and rear axles must be done, which is what we want to deliver to users – the ability to adjust torque at any time. Therefore, with dual permanent magnet motors, we can not only make two identical motors completely identical in control, but also have such flexible control during the design process.
At the beginning of the architecture, we discussed that this type of design may provide a better effect to users. As for energy consumption, for asynchronous front motors, the mechanical inertia of the rotor also requires energy consumption, but the difference is not significant.### Vehicle Energy Consumption and Thermal Management
Question: The Zeekr001 is a large vehicle with a big battery pack, and according to the MIIT, it weighs over 2 tons. Additionally, it uses 255mm-wide tires to ensure performance. So, I am concerned about its actual range performance. Can you tell me about it?
Li Mingyuan: As a Zeekr001 owner, you will have first-hand experience with the vehicle’s range performance. We have done a lot of work on controlling the low-voltage component’s energy consumption. Additionally, electric cars are especially vulnerable to air conditioning energy consumption, mainly the PTC heating in winter. Therefore, we optimize other aspects. For example, all Zeekr001 models come equipped with a heat pump, enabling us to use waste heat generated by the electric drivetrain for the air conditioning or heating the battery pack. In this regard, we can say that we are leading the industry in this area. As a Zeekr001 owner, you can feel the specific effects after receiving your vehicle.
Question: Speaking of thermal management, I remember that Zeekr has promoted that its acceleration performance will not easily deteriorate. Are there any notable highlights regarding system heat dissipation?
Li Mingyuan: We guarantee the sustainability of powertrain output, for example, many companies claim their car can do 0 to 100 km/h in a few seconds, but might have a weak performance on the fourth or fifth attempt. You can look forward to the Zeekr001’s performance in this regard, and we are also conducting tests. We promise that even after several attempts, our worst time will be 3.8 seconds. We don’t have deterioration issues. We focus on the heat exchange system of the electric drivetrain and motor to provide high and lasting heat exchange and dissipation performance. This is reflected in racing, but the Zeekr001 also caters to the daily needs of most users without emphasizing racing.
We have done a lot of work on system temperature control, not only heat dissipation. The most challenging aspect of heat dissipation control is to maintain consistent cell temperature throughout the entire lifecycle because the water inlet and outlet stay fixed. Some cells always receive cold water, while others always receive hot water. How to balance heat exchange between these cells is the most important consideration in our thermal design, even during the end of life when non-uniformities might already exist. If you have a chance to disassemble the vehicle, you will see that our focus is primarily on how to achieve consistency.
Question: Is that mainly achieved through the water supply scheme or through structural design?
Li Mingyuan: Special waterway structure design. How to achieve consistency and uniformity between the insulation of the frame and the internal heat dissipation, because if some places have a high heat transfer coefficient, the higher the heat transfer coefficient, the higher the water temperature to the back, so the battery at the end cannot take away so much heat, which becomes a vicious cycle. So how to balance this was something we had to consider at that time.
Of course, the heat dissipation capacity of the entire battery pack is definitely related to the low flow rate of the flow channel at that time, which is what we have to do in our regular work. What we really consider is how to avoid the side effects throughout the entire life cycle. When this car first came out, everyone could contend for it, but it will be difficult to maintain the quality and design that can compete with others three to five years after. Time will tell.
Is the battery pack a customized “thin” version?
Question: When I actually rode in the Zeekr001, I felt that the back row was relatively outstanding compared to other electric vehicles of the same level, and you also used a 100 kWh large battery, so I am curious about how you solved the thickness of the battery pack and the problem of rear space?
Li Mingyuan: I can first explain why it is difficult to make the battery pack thin, because our requirements for the bottom of the battery pack are very high, higher than other standards I know, far higher than the national standard. That is to say, the bottom shield must have a certain thickness to bear the ball impact, and some insulation and heat insulation materials between the battery cells and the upper cover plate must be made. Our main feature is safety, that is to say, no matter what happens to the battery pack, it cannot conduct electricity upward, nor ionize the air to arc, so some protection must be done in the upper space, which causes us to consider more than other ordinary designs. The space that the battery pack can actually use or that the battery cells can use is limited by the lower shield and upper shield.
In terms of actual space performance, thanks to the colleagues in the architecture department, they matched the clearance from the ground or the levelness of the lower row with the structure of the entire vehicle body, which just accommodates our battery pack. It’s done quite well, and even some wiring you might not know is there. The platform is not protruding. This part is where the architecture department’s skills lie. The difference between pure electric architecture and traditional car architecture is here.
My thoughts as a media and owner
As a media and early owner of Zeekr001, I have gone through the same emotional journey as most early owners in the past few months, from anticipation to doubt after some information was disclosed, then disappointment due to the gap between expectations, and then gradually returned to calmness after official remedies and explanations.
We need to see a phenomenon: users who spend 300,000 yuan to buy a domestic brand electric car are willing to accept new things, but this part of users is also relatively demanding and vigilant. If they deliberately use information asymmetry to fool consumers, they will definitely be lifting a stone to smash their own feet.The most obvious feeling I got after talking with Dr. Li is that, including myself, we all have insufficient understanding of professional content. Therefore, when manufacturers disclose some information, such as the motor this time, users’ instinctive alertness will focus on visible differences.
In this interview, Dr. Li Mingyuan thoroughly explained the origin and final consistency of the two sets of electric drive solutions from a more rigorous system engineering perspective. However, the communication cost of such professional content objectively is not suitable for public dissemination. Therefore, I can also understand why companies are not willing to disclose too many detailed parameters or information.
Even so, I think it is reasonable for users to be cautious in this regard. In order to solve this contradiction, it is still necessary to establish mutual understanding and trust between users and companies through time and practice. After the delivery of Zeekr 001, if the performance of the two motors is indeed highly consistent, users’ doubts will naturally be eliminated.
Returning to the content of the three-electric interview, when Dr. Li Mingyuan talked about considerations such as back-EMF, battery pack thickness, and charging piles, it is not difficult to see that Zeekr values system safety. Including the entire interview, Dr. Li Mingyuan expressed more than once that “working on safety is something that users cannot see, but it is 95% of my work.”
In conclusion
This interview, which is more than 9,000 words long, is about to end. Although I understand that lengthy content is not friendly to the reading experience, I still decided to display this valuable content as faithfully as possible so that users with doubts can have a deeper understanding of Zeekr’s three-electric and see the considerations of the R&D team. More thoughts are also welcome to scan the second QR code at the end of the article to join the car owner group for communication.
Finally, I want to talk about a detail in the interview that impresses me about Zeekr. When talking about some excellent engineering solutions or settings of Tesla, Dr. Li Mingyuan highly recognized and praised Tesla. This point is very important in my opinion, because aesthetics are a very high-level thing that will affect many details from top to bottom, and then affect the final product. When I first started my internship in the garage, Da Ji said something that left a deep impression on me: “Only by knowing what is good can we create good things“.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.