*Author: HYZY
Relevant Standards System
1. OpenX
Currently, the most popular standard system for simulation testing scenario data format is the OpenX series standard system launched by the German Association for Automation and Measurement Systems (ASAM). The standard system attempts to standardize the simulation testing scenario data format from multiple dimensions, such as static simulation scenes, dynamic simulation scenes, and environmental scenes.
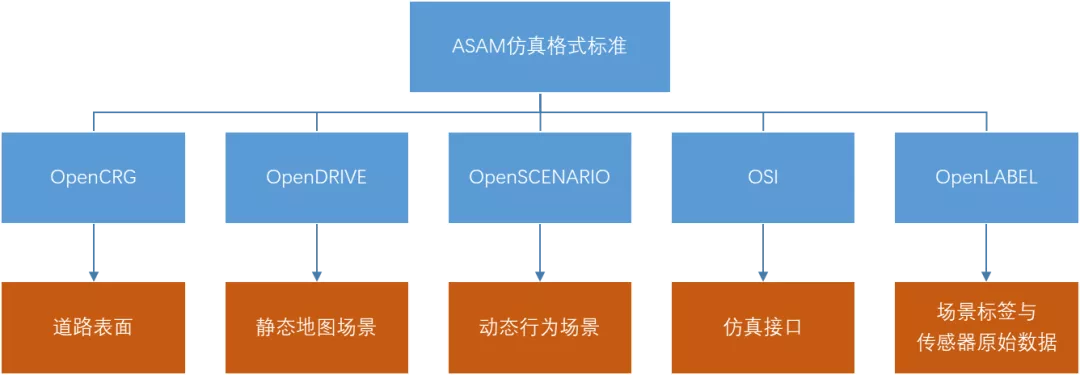
The OpenX series standards mainly include five parts: OpenDRIVE, OpenSCENARIO, Open Simulation Interface (OSI), OpenLABEL, and OpenCRG:
-
OpenDRIVE and OpenCRG mainly define the data format of static scenes;
-
OpenSCENARIO is aimed at the data format of dynamic scenes;
-
OpenLABEL provides a unified calibration method for original data and scenarios;
-
OSI connects autonomous driving functions with simulation tools and integrates various sensors.
2. RoadXML
RoadXML divides the traffic environment into four levels for quick data access of real-time applications:
-
Topology layer: describes the position and connection relationship of elements in the road network;
-
Logic layer: describes the meaning of elements in the road environment;
-
Physical layer: describes the properties of elements (road surface or obstacles);
-
Visualization layer: describes the geometric shape and three-dimensional features of elements.
3. OSM
OSM is short for OpenStreetMap. Its elements (data primitives) mainly include three types: nodes, ways, and relations:
-
Nodes: define a geographical coordinate point by latitude and longitude and can also indicate information such as object altitude, map layer, and floor level within a building;
-
Ways: constructed by connecting multiple points, can form non-closed lines (representing roads, rivers, railways, etc.), closed lines (representing circular subways), and areas (representing enclosed areas);
-
Relations: composed of a series of nodes and ways or other relations, and their relationships are defined by roles.## Static Simulation Scene Data Formats
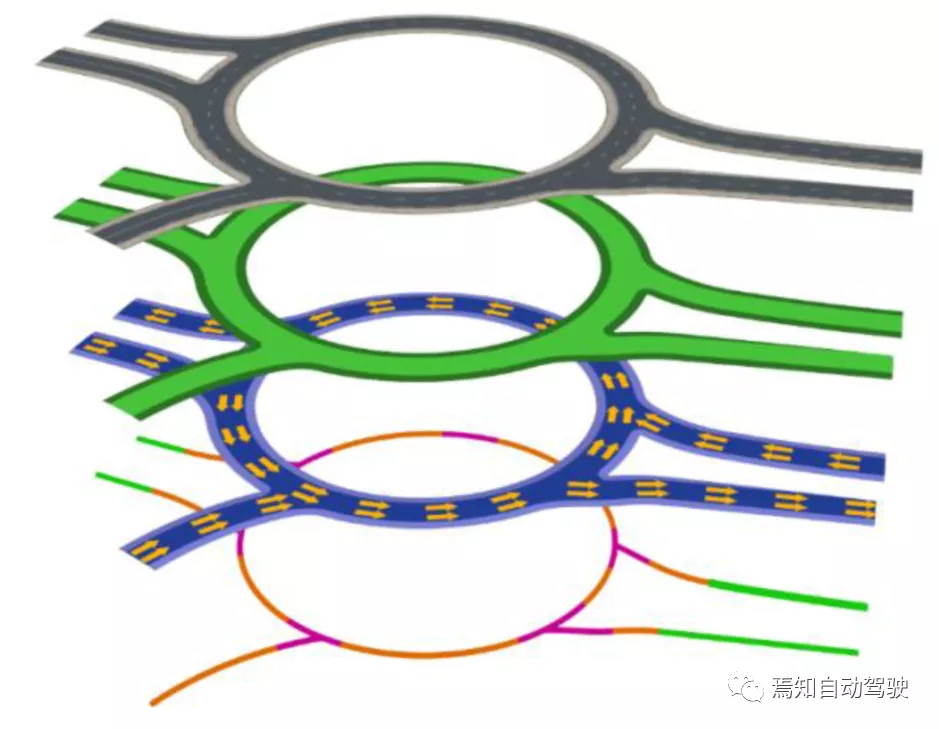
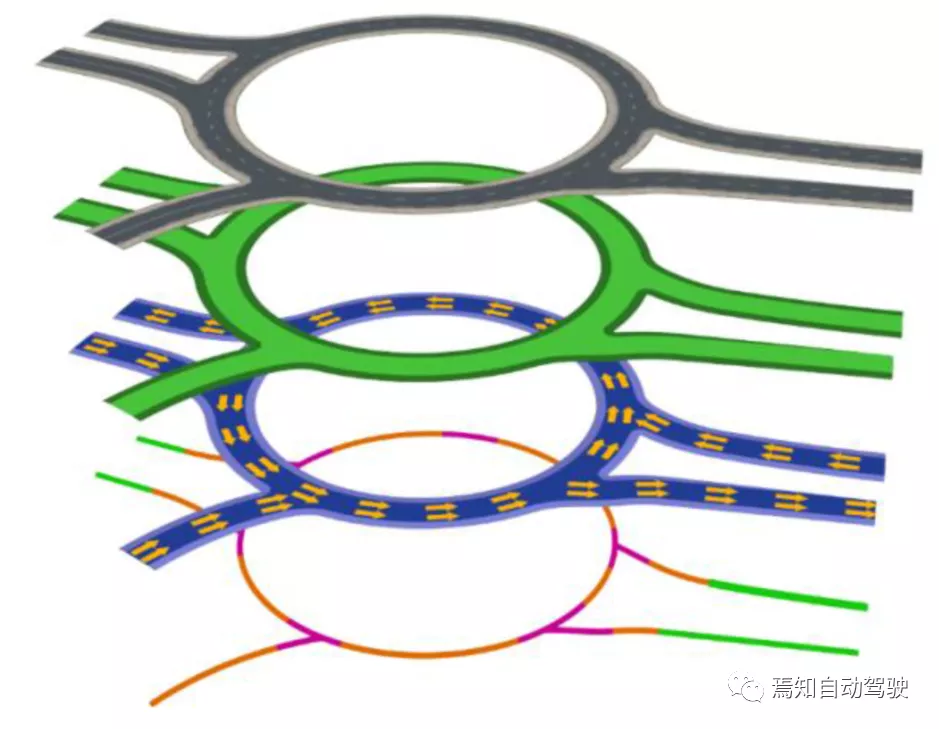
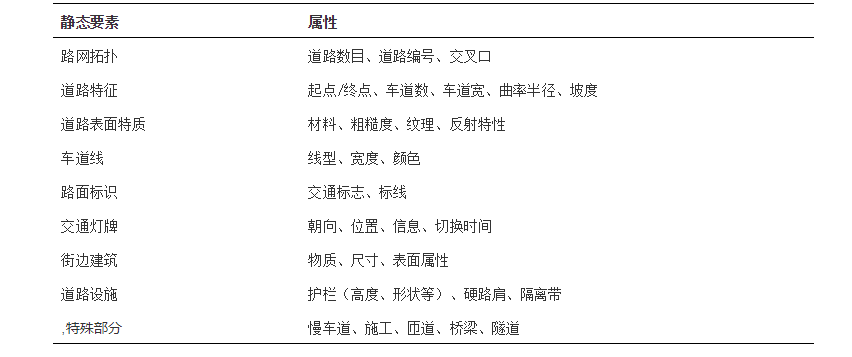
The commonly used static simulation scene data format standards include OpenDrive, OpenCRG, RoadXML, and OSM. Although there are differences between different standards, the elements that can be represented are generally similar, mainly including: road network topology, road geometry features, road surface materials, lane markings, road signs, traffic lights, streetside buildings, and special sections, as shown in Table 1 below.
Dynamic Simulation Scene Data Formats
Dynamic scene data is mainly used to describe the behavior of traffic participants, and the main dynamic elements are shown in Table 2 below.
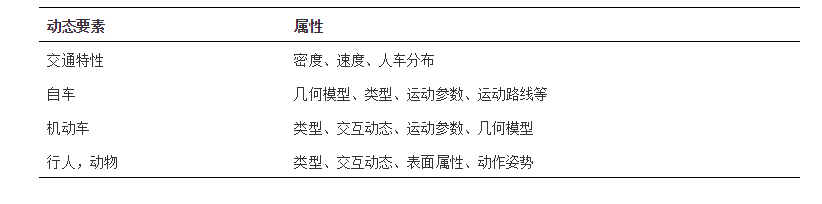
OpenSCENARIO in the OpenX standard system is a commonly used standard for defining dynamic simulation scene data formats. Its main use case is to describe complex, synchronized operations involving multiple traffic participants (such as vehicles, pedestrians, and other traffic participants), and the description of driving maneuvers can be based on driver actions (such as lane changes) or based on trajectories (such as driving maneuvers from recorded data).
In addition, OpenSCENARIO also includes other contents, such as the description of the ego vehicle, driver appearance, pedestrians, traffic and environmental conditions, etc. It also describes the vehicle operations in the event board, divided into events, actions, and sequences.
Environmental Scene Data
Environmental scene data mainly includes weather types, illumination and visibility data, and the main elements are shown in Table 3 below.
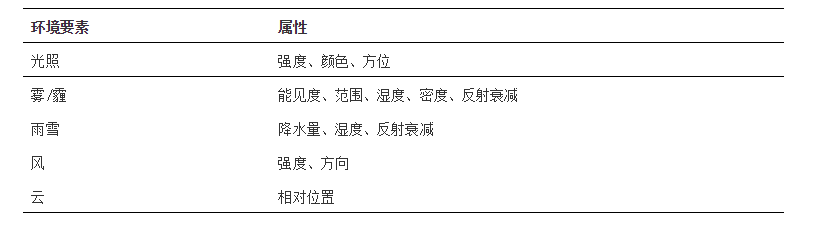
It can be seen that environmental scene data is quite complex, and there is currently no commonly used format in the industry. The OpenSCENARIO standard plans to incorporate this data into future iterations.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.