
*Author: Tifosi
I am currently working on domestic electric power assist, ESC development, and chassis domain control. Today, I spent half a day at work and wrote this post. It should provide some professional answers to this issue. Friendly reminder, this article is divided into 5 parts, approximately 2700 words, those who are only interested in the conclusion can directly read the bold text.
Tesla Pre-Collision Motion Data
First of all, this is the data that Tesla had before the accident, which has been widely circulated on various websites.
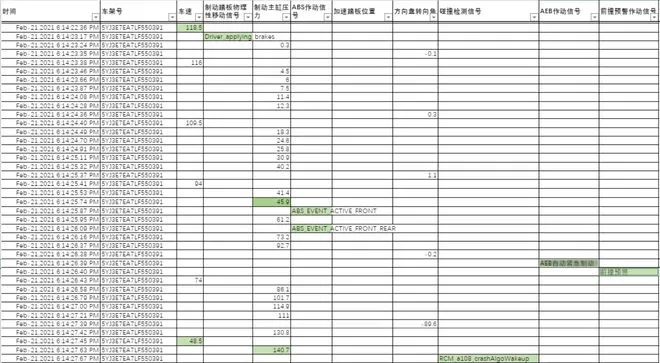
Although this data has been criticized for many problems, such as serious lack of data sampling frequency and loss of key data (such as brake pedal travel), many reasons for the accident can still be identified from it.
Using 6:14:22.35 seconds as the start time of the accident, the vehicle collided at 6:14:27.65 seconds, with a total duration of 5.3 seconds. Draw the relationship between velocity v and deceleration a with time in the same graph. Since the key deceleration was not sent in the log, use dv / dt to calculate the average deceleration between every two sampled velocity points. The speed and deceleration curves of this accident were obtained:
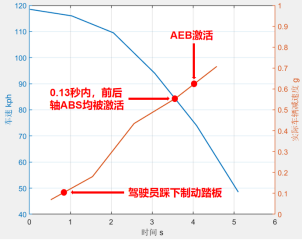
Accident Restoration: During the entire 5.3 seconds of the accident process, at the 0.8 second mark, the driver pressed the brake pedal, and the vehicle began to decelerate. Within the first 3.5 seconds, the braking deceleration increased and the speed always remained decreasing.
At 3.5 seconds, the speed dropped to about 85 kph, and the deceleration of the vehicle was about 0.55 g. Then the front and rear axles were both activated with ABS.
0.5 seconds later, when the speed was 75 kph, AEB was activated, and the deceleration of the vehicle was about 0.62 g.
The collision occurred 1.2 seconds later, and the collision speed was about 48 kph. The instantaneous deceleration of the vehicle before the collision was about 0.7 g, and the average deceleration of the entire braking process was about 0.4 g. The average deceleration after the ABS was triggered was about 0.57 g.
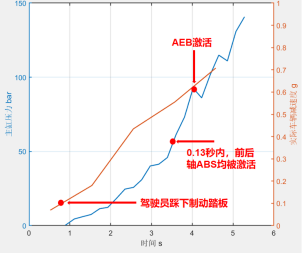
At the same time, Tesla also uploaded the master cylinder pressure signal, and we also drew the master cylinder pressure and corresponding deceleration curves (which are very important for the subsequent analysis of basic braking).
Tesla Model 3 Basic Braking CalculationThe basic braking system of Tesla Model 3 employs 2 fixed-caliper brakes on the front wheels and 2 floating-caliper brakes on the rear wheels. The caliper parameters are as follows:
Front calipers: 2*D42, effective braking radius 133.8 mm;
Rear calipers: D43, effective braking radius 142.5 mm;
Friction coefficient of front and rear brake pads: 0.38.
When loaded or unloaded, the weight of Tesla Model 3 ranges from 1600 kg to 2100 kg, with a front-to-rear load ratio of approximately 0.82. For the purpose of calculation in this accident, the weight of the front axle and the rear axle were assumed to be 820 kg and 1000 kg, respectively. The wheel radius of Model 3 is 335 mm and the wheelbase is 2875 mm.
Furthermore, Tesla Model 3 uses the iBooster Gen2 electronic brake booster provided by the Bosch company. It is a non-decoupled electronic brake booster that drives the internal motor of the iBooster by analyzing the braking stroke of the driver’s pedal.
When the pressure of the main cylinder of Model 3 is P, the deceleration that can be produced by the whole vehicle can be expressed as:

The unit of main cylinder pressure P can be converted to bar, then a = 0.144 P. When both the front and rear axles lock on a road surface with normal high adhesion coefficient, a = 10 m/s2, and the pressure of the main cylinder is about 69.4 bar.
In actual driving, Tesla Model 3 triggers the ABS of the front and rear axles near 60 bar. This value of main cylinder pressure is also consistent with the design value of the Model 3 basic braking system. However, when both the front and rear axles trigger the ABS, the deceleration of the vehicle, which is the most important safety indicator, is seriously insufficient, only about 0.55 g. The ABS continues to work until the collision occurs, but the deceleration of the vehicle always remains far below the deceleration that the vehicle should have under normal road conditions when the ABS function is triggered (usually between 0.9-1.1 g for a normal vehicle). Ultimately, this caused the collision.
At this point, it can be basically ruled out that the accident was caused by a failure of the vehicle’s braking assistance. After the driver and the iBooster provided sufficient pressure to the main cylinder, the whole vehicle also triggered the ABS, but the deceleration was still insufficient. The problem may mainly lie in the back end of the electronic booster.
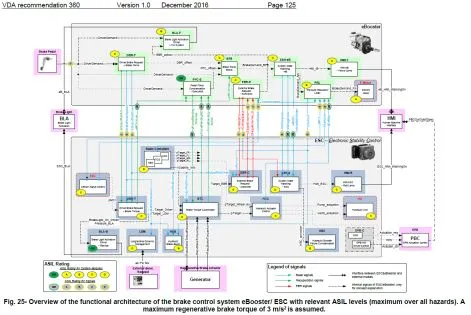
ABS Function and Hard PedalIn both this accident and other complaints from Tesla users, there has been a phenomenon where the pedal becomes hard and cannot be depressed, which is caused jointly by ibooster and ESC under ABS conditions. The ABS function is achieved through the modulation of electromagnetic valves by ESC. First, let’s take a look at the schematic diagram of ibooster+ESC.
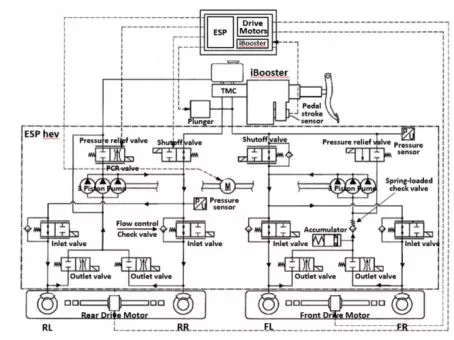
The pressure established by ibooster is pressurized to ESC through two channels of TMC. Under normal braking conditions, ESC does not work, and high-pressure brake fluid directly enters the wheel cylinder through the electromagnetic valve for braking. However, when ABS is triggered, ESC will close the inlet valve of ibooster, and in extreme cases, the motor of ESC will even draw liquid back to the main cylinder of ibooster.
During this process, there will be a situation of abnormally high pressure in the main cylinder of ibooster (similar to the pressure reaching 140 bar in the later stage of braking). At the same time, because the pressure of the main cylinder is very high, the ibooster motor cannot continue to drive the main cylinder, and the driver’s braking pedal and push rod, which are rigidly connected with the ibooster motor, will also become hard to push, which is the phenomenon of the hard pedal.
In the VDA360 software architecture of ibooster proposed by Bosch, a series of software module functions are divided. It is not known whether Tesla Model 3 has made extensive software revisions to ibooster and ESC.
AEB Intervention and Results
In this braking process, the AEB signal was triggered. So, what role did AEB play in this accident?
As can be seen, the AEB signal was triggered in the fourth second, with a vehicle speed of 75 kph = 20.83 m/s. At the collision in the fifth second, the vehicle speed was 48 kph = 13.33 m/s. It can be estimated that when AEB was triggered, the distance from the accident site was about 0.5 * (20.83+13.33) * 1.3 = 22.2m. According to the usual AEB triggering requirements, the distance to the front vehicle had already been too close when the warning was issued. Assuming that the vehicle continuously decelerates at 0.9 g until it stops after triggering AEB, the braking distance required is also 24.1 m.In other words, regardless of the braking performance, collision is inevitable based on the timing of the Tesla AEB trigger and the distance to the preceding vehicle, which is mainly related to the ADAS camera algorithm and has little to do with the analysis of insufficient braking force in this case.
Currently, L4 and L5 technologies are far from popular, and the consensus is that the priority of driver requests should be higher than that of ADAS computers. Therefore, the AEB trigger of most OEMs is conditional on a certain level of braking pressure requested by the driver before the AEB function is activated.
In the present braking process, with the precondition that ABS has been activated and the vehicle’s deceleration has reached its maximum value, regardless of whether Tesla’s logic prioritizes the driver or ADAS computer, the activation of AEB will not further increase the vehicle’s deceleration, which can improve the vehicle’s braking distance.
In addition, after AEB activation, the functionality of AEB is tested in ENCAP and CNCAP, with specific standards for the relative decrease in vehicle speed within one second of AEB trigger at different speeds. Usually, the requirement is for a relative decrease of 40 kph or 45 kph. during the first second after AEB trigger. However, during the 1.3 seconds between AEB trigger and collision, the relative decrease in vehicle speed was only 37 kph, which is a poor AEB performance.
Accident Liability Analysis and Summary
The causes of this accident are multifaceted. At the moment of ABS activation, the vehicle was about 33 meters away from the preceding vehicle, with a speed of 85 kph. Even if ABS worked normally, it was still a relatively short braking distance. There was a certain overestimation in the driver’s prediction about the vehicle speed and the distance to the preceding vehicle.
The safety failure of the Tesla Model 3 is even more apparent. The core problem lies in the inconsistency among the master cylinder pressure, ABS, and deceleration data. Although the master cylinder pressure is relatively consistent with the ABS signal, there is a significant discrepancy between them and the vehicle speed or deceleration. By converting the master cylinder pressure to the corresponding deceleration based on the basic braking data, adding an additional 0.1g energy recovery deceleration, and comparing it with the actual measured deceleration of the vehicle, we can obtain the most critical chart in this analysis:
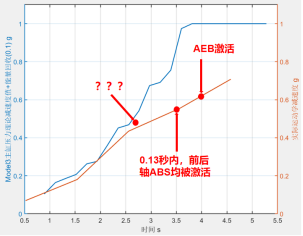 It can be seen that within the first 2.5 seconds of braking, the consistency between the two (driver’s brake request or master cylinder pressure) is very good, and the deceleration of the entire vehicle can reflect the driver’s braking request (master cylinder pressure). After 2.5 seconds, the master cylinder pressure rises rapidly, while the deceleration of the entire vehicle is limited to a very low rising range. In the critical 1.8 seconds after ABS is triggered, the driver and iBooster have provided far more brake pressure than the maximum deceleration of the vehicle requires, but Tesla’s ABS output a peak deceleration that cannot even reach the threshold of conventional ABS, which ultimately led to the collision. Currently, no objective anomalies have been found in the road conditions at the time.
It can be seen that within the first 2.5 seconds of braking, the consistency between the two (driver’s brake request or master cylinder pressure) is very good, and the deceleration of the entire vehicle can reflect the driver’s braking request (master cylinder pressure). After 2.5 seconds, the master cylinder pressure rises rapidly, while the deceleration of the entire vehicle is limited to a very low rising range. In the critical 1.8 seconds after ABS is triggered, the driver and iBooster have provided far more brake pressure than the maximum deceleration of the vehicle requires, but Tesla’s ABS output a peak deceleration that cannot even reach the threshold of conventional ABS, which ultimately led to the collision. Currently, no objective anomalies have been found in the road conditions at the time.
Considering that Tesla has extensively rewritten the underlying and upper control software algorithms of Bosch’s iBooster and ESC, this part of the software, especially the ABS control, electromagnetic valve control, and the control algorithms between ESC and iBooster and the energy recovery of the drive motor, is probably the biggest contributor to the accident.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.