*Author: Aimee
Currently, many host factories have included essential sensors for the next-generation autonomous driving products, such as laser radar, 4D imaging millimeter-wave radar, side-view cameras, and so on. This series of sensors requires the autonomous driving central controller to have higher computing power, data transmission bandwidth, etc. At the same time, these sensors themselves have achieved detection advantages that previous sensors could not achieve in terms of environmental detection performance. For example, laser radar can detect irregular targets (such as tires, falling rocks, obstacles) through the collection of point cloud data; side-view cameras can detect side targets and road static information (such as lane markings, road edges) that radar cannot detect. While 4D imaging millimeter-wave radar, as a highly precise millimeter-wave radar, can accurately classify forward targets through “point cloud”-like clustering, including accurate differentiation of heading angle, posture, and position information.
This article will provide a detailed analysis of the principles, advantages, and disadvantages of these three types of sensors that will be used in the future and propose targeted commercial landing solutions, which can provide basic hardware design ideas for the engineering design and development of autonomous driving systems.
Comparison of Laser Radar Types
Currently, a large number of laser radar products produced are still mechanical laser radar. Solid-state laser radar has many advantages. Firstly, its structure is simple and its size is small. Since it does not require rotating parts, it can greatly compress the structure and size of the radar, improve its service life, and reduce costs. Secondly, since the optical structure of the mechanical laser radar is fixed, precise adjustment of its position and angle is often required to adapt to different vehicles, while solid-state laser radar can be adjusted by software, greatly reducing the difficulty of calibration and increasing scanning speed and accuracy.
Currently, solid-state or quasi-solid-state laser radar includes several categories, such as MEMS, FLASH, OPA, etc., and this type of laser radar is still under heavy development.
The comparison of several types of laser radar is shown in the table below to some extent:

From the table, it is not difficult to see that mechanical laser radar is already outdated in terms of performance, cost, and future commercial applications. Solid-state MEMS or Flash laser radar, which partially compensates for the scanning defects of mechanical radar, is the preferred option for current applications. Pure solid-state laser radar OPA is highly suitable for future autonomous driving requirements in terms of performance, maturity, application scenarios, and cost.
Laser Radar Extreme Scene Detection PrinciplesWe all know that the LiDAR system detects the position, speed and other features of the target by emitting a laser beam to detect the target, and then comparing the received signal (target echo) reflected back from the target with the transmitted signal, and processing it appropriately to obtain information about the target, such as distance, azimuth, altitude, speed, posture, and even shape.
As analyzed earlier, the current LiDAR solutions that can be implemented for autonomous driving are mainly solid-state LiDAR solutions. This solid-state LiDAR has two different scanning methods, one is a repeated scanning method, which can be customized for different needs, and the other is a non-repeated scanning method. This unique scanning method establishes a non-repeated scanning point cloud effect with different scanning frame rates. Each of these scanning methods has its own corresponding application advantages:
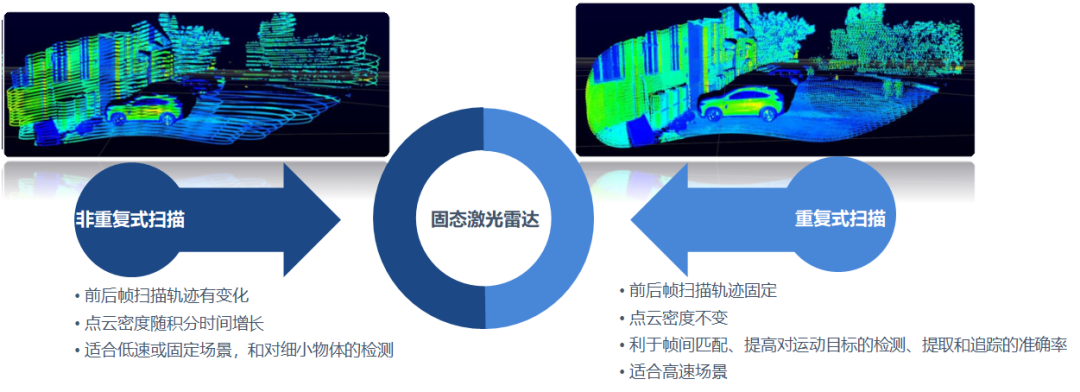
Compared with the traditional mechanical LiDAR point cloud coverage, the non-repeated scanning solution has obvious advantages in point cloud coverage.
- When the frame interval time of the scan = 0.1s:
-
This solid-state LiDAR is equivalent to a traditional 64-line LiDAR;
-
This solid-state LiDAR outperforms the traditional 128-line LiDAR;
-
When the frame interval time of the scan > 0.1s:
With time accumulation, it tends to 100% coverage rate.

At the same time, this non-repeated scanning method can effectively reduce information omission for slender objects. In the autonomous driving environment, such slender detection targets may be unloaded flatbed trailers, which may become unavoidable detection vulnerabilities even in a 128-line mechanical LiDAR. As shown in the figure below, assuming the thickness of a flatbed trailer is 0.2m, the target may not be detected when the detection distance of the LiDAR to the target is greater than 29m. D=0.1 m/(tan0.2°)=29 m

However, for high-speed autonomous driving scenarios, the scene is relatively single, and the moving targets change rapidly and switch quickly in the high-speed scene. Therefore, the repeated scan of a LiDAR is generally used for target detection. Because the repeated scan can detect more moving targets in the scene, and match the corresponding motion information. The matching process uses the data information in two frames of the repeated scan to match the point cloud information, similar to the image matching between two frames in multi-angle images.According to the above analysis, non-repetitive scanning and repetitive scanning are advantageous for congested following scenes in L3 level autonomous driving and highway assisted driving, respectively. If more complex scenarios are considered, non-repetitive scanning LiDAR can be used as much as possible.
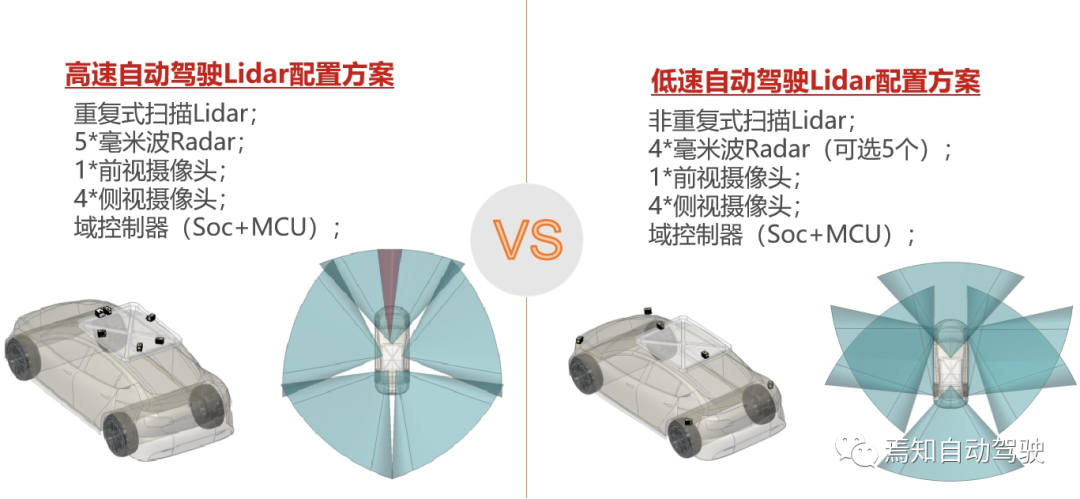
As shown in the above figure, for autonomous driving, two different types of LiDAR, for high and low speeds respectively, can fully meet the different requirements for scenes during high and low speed driving. Generally, high-speed scenes require the sensor to identify relevant obstacles and targets at further distances, so that even at higher speeds, the vehicle can still react and slow down to reduce the risk of collision. This requires the LiDAR to have a narrow scanning range and longer scanning distance, and to use repetitive scanning to achieve image matching technology. In low-speed autonomous driving, it is required to react to complex scenes (generally urban scenes), such as when a vehicle cuts into the lane in front of the car, and the vehicle needs to accurately reduce speed and apply brakes to avoid collision.
Commercialization Strategies for LiDAR
Chinese LiDAR companies are developing mechanical and solid-state LiDARs at full speed to bring affordable products to the market. Hesai and Robosense are leading LiDAR start-ups in China, and are currently developing MEMS, Flash and OPA LiDARs… Chinese LiDAR start-ups view Velodyne as a benchmark, and offer 16, 32, 64, and 128 beam LiDARs at less than half the price of Velodyne.
The following is a list of companies that are worth watching in the field of ADAS/autonomous driving LiDAR:
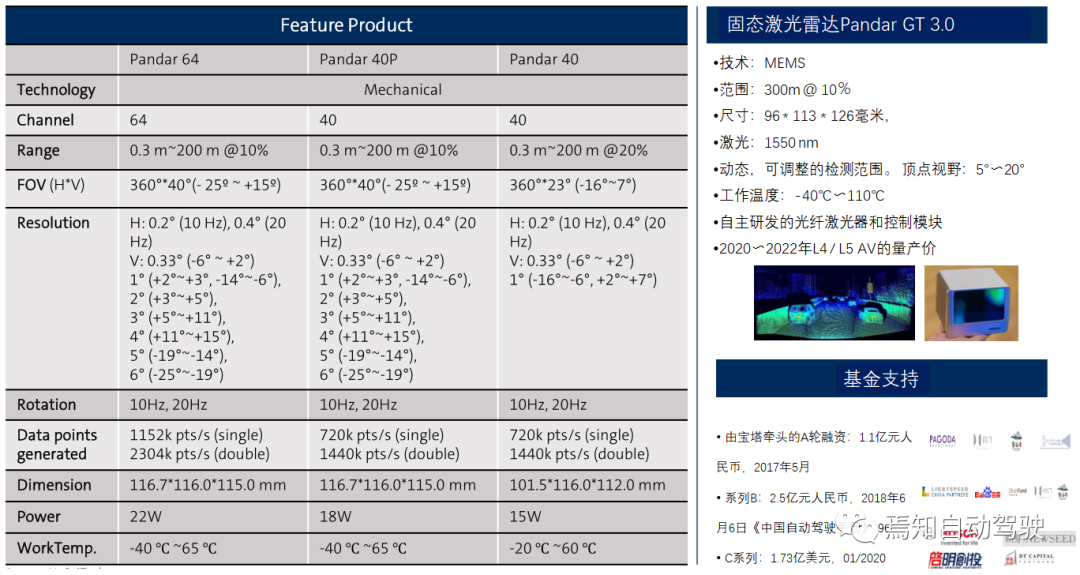
- Hesai was founded in San Jose in 2013 and relocated to Shanghai in 2014. Its mechanical LiDAR Pandar 40 has been widely recognized in the market, and its latest MEMS-based solid-state LiDAR GT3.0 was exhibited at CES2019. Pandar 40/40P has become the most popular product due to its high performance and low cost. The latest MEMS-based quasi-solid-state LiDAR GT is scheduled to be mass-produced after 2020.
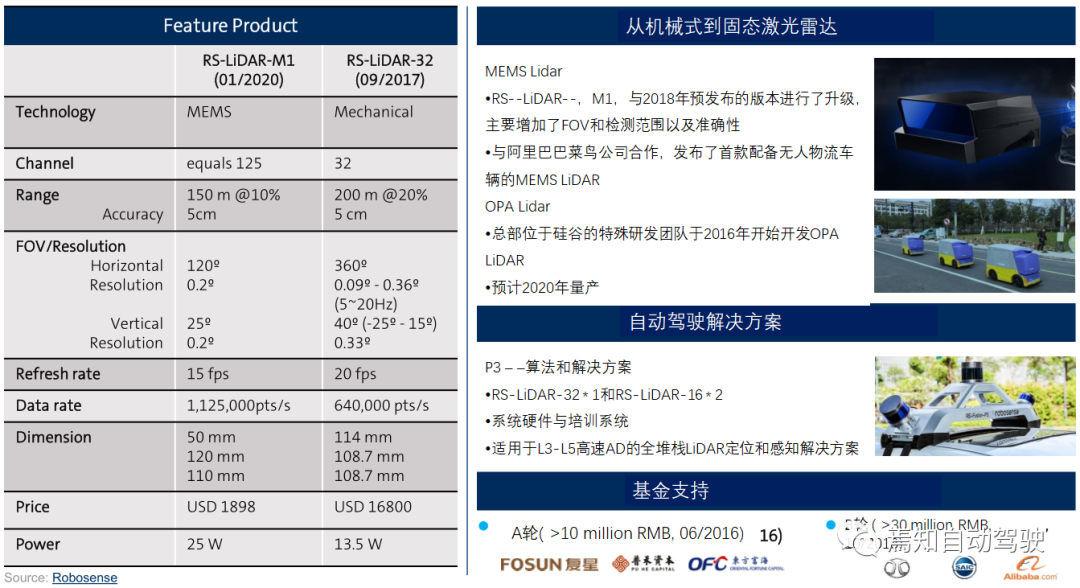
 – Robosense, located in Shenzhen, focuses on LiDAR hardware, 3D data processing, and deep learning technology. It showcased its updated solid-state LiDAR RS-LiDAR-M1 at CES and won the CES Innovation Award.
– Robosense, located in Shenzhen, focuses on LiDAR hardware, 3D data processing, and deep learning technology. It showcased its updated solid-state LiDAR RS-LiDAR-M1 at CES and won the CES Innovation Award.
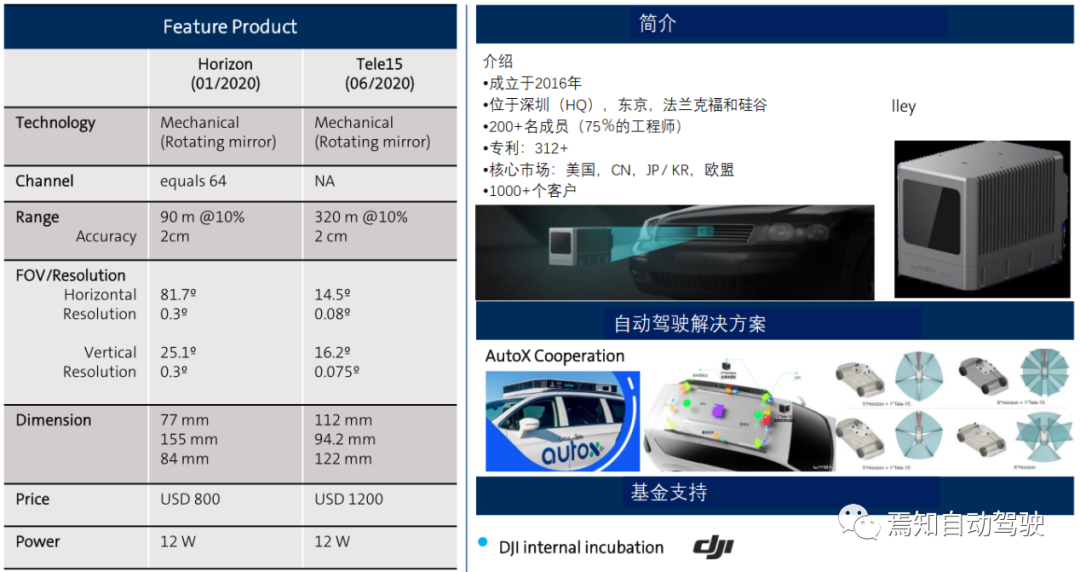
- Livox was incubated by DJI without any additional funding. The latest products are the short-range Horizon and long-range Tele15, emphasizing low cost and strong support from DJI for development and production.
- SureStar was founded in Beijing in 2005 but has not made much progress in recent years. With a solid technical foundation in airborne and ground-based LiDAR, SureStar has launched LiDAR products since 2016.

- Benewake, founded in Beijing in 2015, started with AGV LiDAR and now focuses on developing Flash solid-state LiDAR. It has delivered mass-produced, low-cost solid-state LiDAR concepts for drones and AGVs. It is now focused on solid-state Flash LiDAR for obstacle avoidance and navigation.

- Neuvition, established in Silicon Valley and Xiamen in 2016, unveiled the high-resolution MEMS LiDAR Titanic Mini in July 2018. It has developed a MEMS LiDAR Titan Mini with high resolution (H0.04°/V0.05°@480 lines, 1280 pixels), compact size (45.6 mm * 68.0 mm * 92.0 mm), and camera fusion capability. It was invested in by SAIC Motor Corporation and Sumitomo Corporation in March 2018.
– iLiDAR was established in Hangzhou in July 2017 and launched the first FMCW LiDAR in China in July 2018. The company has completed the first FMCW prototype in China, with a range of 1000m (accuracy: 0.05m) and is not affected by background light. In addition, it can detect the speed of objects (accuracy: 0.1m/s). Baidu invested in iLiDAR in January 2018.
- Both companies are focused on solid-state LiDAR. Neuvition has developed the MEMS LiDAR Titan Mini with high resolution and small size, while iLiDAR has completed the first FMCW prototype in China and plans to launch a MEMS prototype in the future.
Summary
As we know, LiDAR can achieve high-resolution detection in the process of autonomous driving. It provides better detection capability for small targets at long distances, and reacts earlier. This process effectively compensates for the shortcomings of millimeter-wave radar in detection accuracy and weak static object detection capability. At the same time, it effectively solves the weakness of cameras in recognizing and traversing the entire scene library due to environmental factors, thus better meeting more CornerCase scenarios in the driving process.
Since the deployment of LiDAR needs to fully consider its effective landing solution, the adoption of different types of LiDAR needs to fully consider its performance, cost, maturity, production cycle, etc. Therefore, this article has conducted a complete survey and comparative analysis of the corresponding LiDAR implementation suppliers, and analyzed the laser radar types that can be implemented and applied accordingly, providing corresponding references for LiDAR selection and autonomous driving system scheme design.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.