Introduction
Recently, Toyota has released two articles (see references at the end) to introduce the systematic hardware and software configuration and controller design architecture of its automated driving system “Lexus Teammate” from L2 to L3. I am going to excerpt some important parts for your reference. This is the first time that Toyota has adopted NVIDIA chips as the computing platform for developing automated driving technology (based on NVIDIA Xavier). Although this system is mainly designed based on L2, it allows for systematic testing of L3 via OTA under the circumstance of road testing in 2021, which keeps up with the pace of Honda.

Sensor Configuration Data of Teammate
Toyota considers the changes of the environment and the accuracy in recognizing road conditions and surrounding objects, and also the redundancy recognition function in sensor configuration. Considering the cost limitation, the company did not use a large number of lidars (as previously used in the testing process) in practical operation. Therefore, Toyota’s solution is to add as few sensors as possible based on the sensor configuration of the previous advanced driving assistance system, as shown in the image below.
1) ADAS basic components: The standard system mainly includes the Panoramic View Monitor (PVM) surround-view camera.
2) LSS+A (Lexus Safety System + A) active safety protection system: This system is a basic L2 version system, including front dual cameras, front long-range millimeter-wave radar, and 4 surround millimeter-wave radars.
3) Newly added sensors: Mainly including a lidar, a positioning camera, and a long-distance camera.
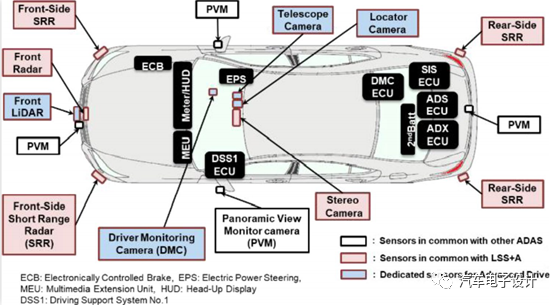
The purple part in this figure is the newly added perception sensor, while the red part is the reused perception system that has already been mass-produced.
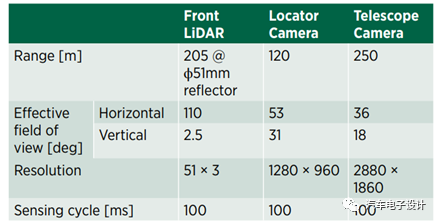
 Here are the basic parameters of the newly added perception sensor: the remote camera and LiDAR detection range is set to 250 meters, with a sensing interval of 100 ms.
Here are the basic parameters of the newly added perception sensor: the remote camera and LiDAR detection range is set to 250 meters, with a sensing interval of 100 ms.
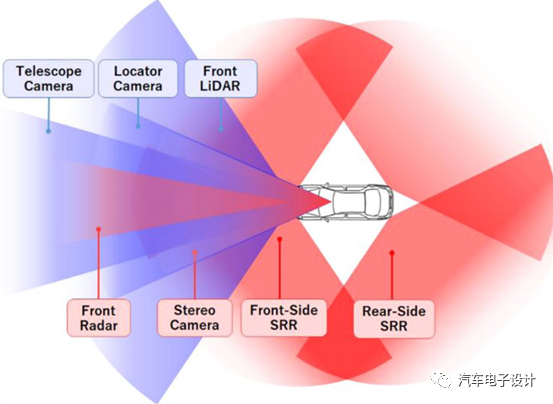
Compared to the testing conditions, the usage of LiDAR is significantly reduced. There is only one forward-facing LiDAR in actual production, while the previous and rear-facing LiDARs have been eliminated. In this sense, Toyota relies heavily on sensor fusion and redundancy, with visual input being the main reference.

Redundancy and System Processing
Toyota has applied an interesting design here. The system is based on a HEV platform, that is, the entire vehicle has a high-voltage battery. To support L2, Toyota has supplied two 12V batteries, which are divided into two groups for power supply.
1) Execution and Communication: Brake and steering are both dual-redundant and dual-powered. Communication is also backed up using two different methods – Ethernet and CAN. Power supply is also separated.
2) Forward Recognition: Toyota clearly separates the analysis of forward sensing and localization into two groups, with two sets of inputs and two sets of processing redundancy. The power supply is also separately structured.
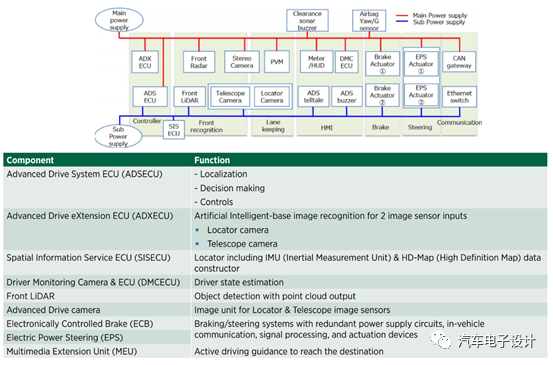
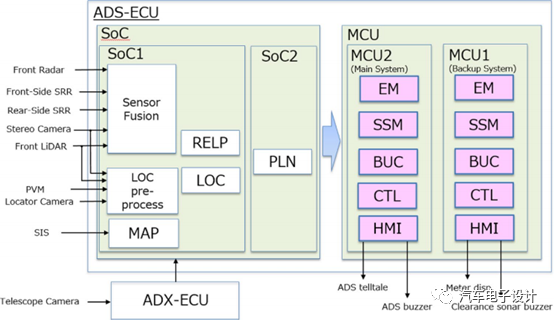
The next diagram provides a clearer view. The ADS-ECU is the core processor that receives input from almost all perception sensors. The ADX-ECU, which is based on Xavier, provides redundant processing of forward-facing cameras.
Conclusion:
I have provided a brief summary for now, and will supplement more information later. Major enterprises in this field are continuously investing in the development of software with independent resources.
References:
1) Teammate Advanced Drive System Using Automated Driving Technology## System Architecture Design Suitable for Automated Driving Vehicle: Hardware Configuration and Software Architecture Design
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.