In the first nine shares, I introduced the mainstream sensors used in autonomous vehicles. These sensors are physical objects that can be seen but not touched. In the process of autonomous driving, there is also an “invisible” sensor that plays a huge role, and that is the high-precision electronic map.
The high-precision electronic map, also known as the high-definition map (HD Map), is a type of map specifically designed for autonomous driving services. Unlike traditional navigation maps, high-precision maps can provide lane-level navigation information in addition to road-level navigation information. In terms of information richness and precision, high-precision maps are far superior to traditional navigation maps.
The difference between traditional navigation maps and high-precision electronic maps can be intuitively seen in the following figure.

When discussing high-precision maps, I will focus on three aspects. First, it is necessary to have a rational understanding of what a high-precision electronic map is and what the real difference is compared to traditional maps. Second, we will discuss how high-precision maps are applied in the field of autonomous vehicles. Finally, we will talk about the challenges that high-precision maps face in the industry.
What is a high-precision map?
At present, high-precision maps are more defined as maps that serve autonomous driving. Compared to the “qualitative” description of traditional maps, high-precision maps are a “quantitative” description.
For example, in terms of slope, traditional maps can only provide information that there is an upward (downward) slope ahead, but cannot provide the angle of the slope;
In terms of turns, traditional maps only provide information that there is a “sharp” turn ahead, but cannot provide the curvature radius of the turn;
In terms of intersections, traditional maps only provide information that there are traffic lights at the intersection ahead, but do not know the specific location of the traffic lights.
…
High-precision maps can provide precise data that traditional maps cannot, and this is the “quantitative” description of high-precision maps.
These quantitative descriptions are not of much help to human drivers, because humans are highly intelligent individuals with extremely high image recognition, information association and learning abilities, abilities that are currently lacking in the “brain” of autonomous vehicles. In order to make up for the shortcomings of the “brain” of autonomous vehicles, high-precision maps have emerged.
The content that high-precision maps can provide for autonomous driving is as follows:
Lane-level road informationTraditional navigation maps can only provide road-level navigation information, as shown on the far left of the figure. Road R1 is connected to R2, which in turn connects to R3 and R4. High-precision maps, on the other hand, can provide lane-level navigation information, which can be accurate to the lane-to-lane connection relationship, as shown in the middle of the figure. Lane1 is connected to Lane4, Lane4 is connected to Lane8, Lane3 is connected to Lane6 and Lane7, and Lane7 is connected to Lane10.
Image source: Future Automotive Lectures – NetEase Cloud Classroom High-Precision Maps, the Way to Self-Driving Cars
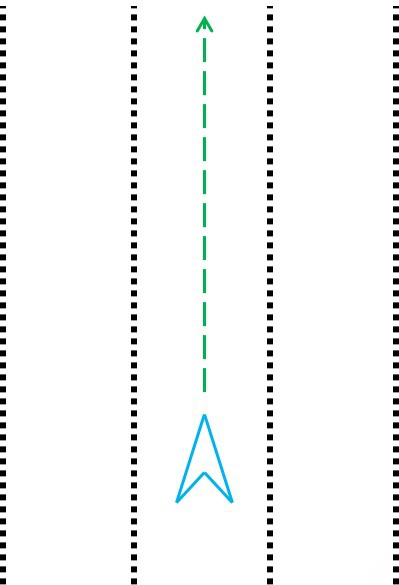
Lane-level road information can solve the problem of unmanned vehicles not knowing how much angle and speed to maintain when turning at intersections. The green dashed line on the right side of the figure is the virtual lane center provided by the high-precision map for unmanned vehicles. As long as the correct lane is changed in advance and driven along the lane where the virtual lane is located, the intersection can be passed smoothly.
Image source: Future Automotive Lectures – NetEase Cloud Classroom High-Precision Maps, the Way to Self-Driving Cars
Road Prior Information
Prior information refers to information that can be collected in advance and will not change in a short period of time.
It is difficult to perceive whether the vehicle is currently on a highway or a normal city road, the maximum speed limit on unlimited speed limit sections, the curvature of the road ahead, and the GPS signal strength on the current road segment based solely on sensor information when the sensors encounter performance bottlenecks. However, these pieces of information are objectively existing and will not change with external factors, so they can be collected in advance and transmitted to unmanned vehicles as prior information for decision-making.
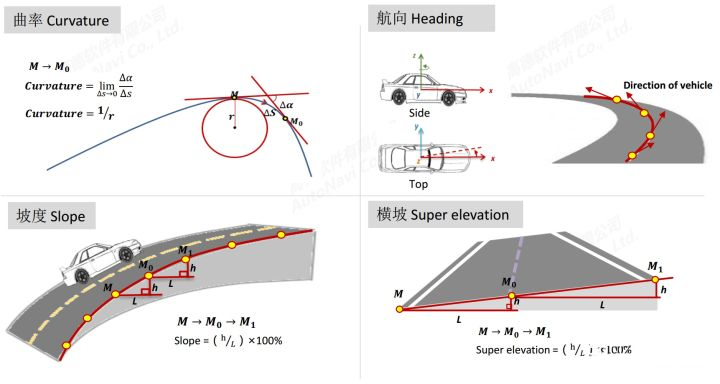
The figure shows some prior information that high-precision maps can provide for unmanned vehicles, including road curvature, heading, slope, and cross slope angle. These pieces of information are essential for the safety and comfort of unmanned vehicles.
Points of Interest
Points of interest (POI) are things that can become POIs in traffic scenarios, such as traffic signs, ground markings, lamp posts, traffic lights, toll booths, etc. described by a center point and multiple envelope points, or roadsides, guardrails, tunnels, gantries, bridges, etc. described by a chain of continuous points.
High-precision maps accurately record the longitude, latitude, and height of these POIs. As long as the precise position (longitude, latitude, and height) of the unmanned vehicle is given, the relative position of each POI with respect to the vehicle can be calculated. The relative positional information of these POIs is then projected onto the vehicle’s front view, as shown in the figure.# English Markdown Text with HTML tags
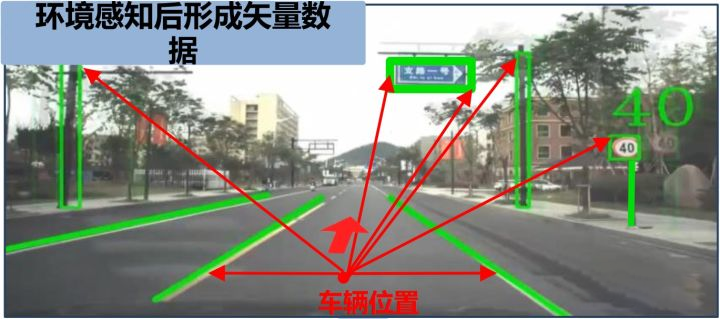
Image source: Future Automotive Lecture Hall – NetEase Cloud Classroom. High-precision maps, the only way to self-driving.
At this point, someone must be asking: high-precision maps contain so much more information than traditional maps, so their capacity must be much larger, right?
No, it isn’t. The capacity of current high-precision maps is not much larger than that of traditional maps. Why?
Because current high-precision maps are completely designed for self-driving cars, while traditional maps are designed for humans. High-precision maps only need to focus on information related to driving (roads, POI), and do not care about how many floors a nearby mall has, how large a supermarket is, or how many small restaurants there are. This type of information is what humans care about. It is precisely because of the different focuses that there is not much difference in capacity.
The following figure more clearly summarizes the focuses of traditional maps and high-precision maps from the aspects of elements, systems, and uses:

Image source: Future Automotive Lecture Hall – NetEase Cloud Classroom. High-precision maps, the only way to self-driving.
Application of High-Precision Maps
High-precision maps are just static data. When actually using them, it is impossible to import all of the national maps into the system at the beginning. This would not only be time-consuming but would also occupy a lot of resources. In addition to providing high-precision maps, high-precision map vendors (map providers) also provide a software called a “map engine.” This engine is responsible for the resource scheduling of the entire high-precision map. The self-driving car only needs to tell the “map engine” the approximate position and destination, and the “map engine” will publish the high-precision map data needed during this process for the self-driving car to use. The data flow is shown in the following figure.
The application of high-precision maps requires high-precision positioning.
High-precision positioning includes at least the current position and heading angle of the self-driving car. Position refers to the longitude, latitude, and altitude of the GPS antenna installation position of the self-driving car. The heading angle refers to the angle between the front of the self-driving car and the true north direction.
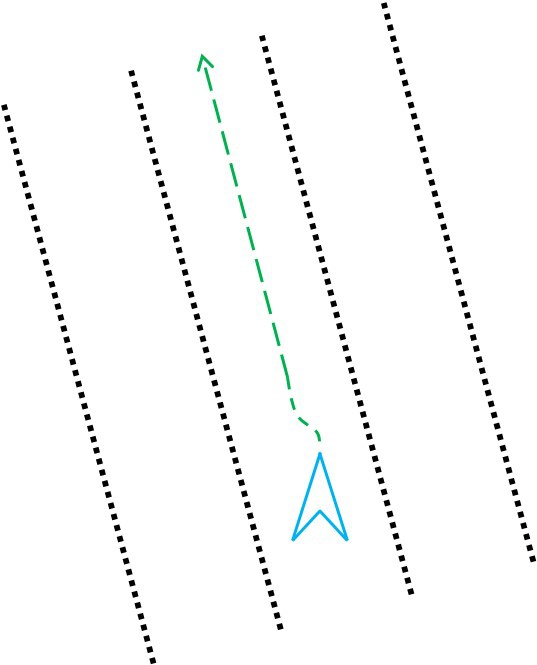
In theory, given the longitude, latitude, and altitude of two points, the relative position of the two points can be calculated. So why is it necessary to provide accurate heading information?The relative positions of the points on the lane in the coordinate system of the autonomous vehicle can be seen in the figure below (black dots) when the autonomous vehicle wants to achieve driving straight along the lane line on the high-precision map, given correct longitude, latitude, and heading values. The trajectory planned according to the lane line (green line) is a straight line parallel to the lane.
Imagine that if the heading value becomes inaccurate, such as deviating by tens of degrees, all the points on the lane line will be rotated around the center due to the unchanged longitude, latitude, and altitude, while their distances to the center of the autonomous vehicle remain the same. The relative positions of the lane line obtained in the coordinate system of the autonomous vehicle are shown in the figure below. The trajectory planned according to this lane line will make the autonomous vehicle think that it must turn to maintain the lane line. The final control result will be that the autonomous vehicle keeps rotating in place. Therefore, the heading angle of the autonomous vehicle is an important positioning information.
Fully utilizing the high-precision map will help autonomous driving in the following ways:
Enhancing the perception ability of autonomous vehicles
For example, in fine weather conditions, the on-board sensors can detect lane lines, obstacles, roadside edges, and passable spaces, but they are powerless to detect road gradients and curvatures. These data are helpful to the control of autonomous vehicles, and high-precision maps can provide them.
Another example is that in severe weather conditions such as heavy rain, heavy snow, and sandstorms, on-board sensors are unable to perceive long-distance information such as lane lines and obstacles. However, the combination of positioning and high-precision maps can provide information such as lane lines, roadside edges, and passable spaces, thus increasing the information redundancy of the system.
Combining on-board sensor information to improve positioning accuracy
As I introduced in “Introduction to Autonomous Driving Technology (III) | Baidu Autonomous Vehicle Sensor GPS In-depth Analysis,” existing high-precision positioning of autonomous vehicles may be inaccurate in some cases. Therefore, relying solely on GPS positioning is too unreliable.
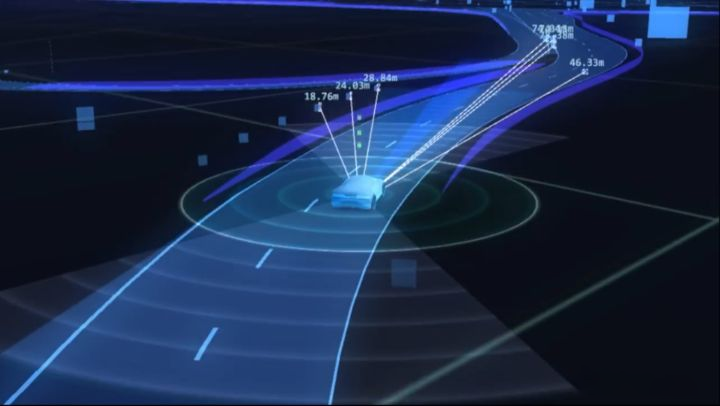
The common positioning method in the industry is the location method of GPS + high-precision map + camera (lidar, etc.) information fusion. Let’s take a look at a video to understand how the foreign map provider Here combines on-board sensor information for positioning.
First, the rough location of the autonomous vehicle is determined according to GPS data (longitude, latitude, and heading), which may have an error of 5~10 meters compared to the real position.
The lateral position of the autonomous vehicle is corrected by comparing the detected lane lines (dotted or solid) and distance to road edges (curb or barrier) from the onboard sensors with lane lines and road edges provided by high-precision maps.

The longitudinal position and heading of the autonomous vehicle are corrected by matching the detected road features such as billboards, traffic lights, wall signs, and ground markings (stop lines, arrows, etc.) from the onboard sensors with the same features (POIs) provided by high-precision maps. In the absence of any detected road features, short-term position estimation can be done using dead reckoning.
The positioning algorithm of an autonomous vehicle typically uses particle filtering, which requires several computational cycles to converge and provide a relatively stable positioning result. I will introduce the principle of particle filtering in a subsequent series of articles.
Challenges of High-Precision Maps
Challenge 1: Crowdsourcing for High-Precision Maps
Although high-precision maps are useful, they cannot currently be produced on a large scale, with most of the inside and outside fieldwork still relying on manual annotation and data conversion. Moreover, relying solely on dozens or hundreds of collection vehicles from mapping companies on the roads makes it difficult to ensure the timeliness of map data, i.e., its “freshness.”
Therefore, mapping companies hope to leverage the front-mounted cameras of mass-produced vehicles to provide not only L2 or above autonomous driving capabilities but also to transmit pre-processed data to the cloud for data updating. When the actual situation at a location is detected by enough private vehicles and is found to be inconsistent with the map, the mapping company confirms the information and updates the map accordingly. In this way, map data can be iterated quickly enough to better serve the high-precision map ecosystem and autonomous vehicles.
Challenge 2: Policy of High-Precision Maps
This policy challenge only exists in China.
High-precision maps are closely related to national defense, so their collection and use are subject to strict restrictions in China. Currently, there are only 14 units in China that have Class-A map surveying and mapping qualifications, meaning that only these 14 mapping companies have the right to collect and use high-precision maps. If a startup in the autonomous driving industry wants to use high-precision maps, it either has to rely heavily on these 14 mapping companies or conduct research on the legal red line.Due to the existence of the surveying and mapping qualification policy, I think it is not easy for foreign autonomous driving technologies to enter the Chinese market. Even big players like Bosch, a Tier 1 company, would still struggle to expand their autonomous driving technology without the help of local mapping companies.
Conclusion
There is an interesting saying in the field of high precision maps, which is “Make the invisible visible.” This sentence can be used as a summary of this article.
Well, this article basically covers most of the knowledge of high precision maps and their applications in the field of autonomous vehicles. If you have any questions about high precision maps, feel free to leave a comment below for further discussion.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.