
Introduction to Autonomous Driving Technology (Hardware)
The first lecture of the “Introduction to Autonomous Driving Technology (Hardware)” has begun!
Today, I will introduce a start-up company from San Francisco, which was once the trailblazer of Baidu’s autonomous driving.
In July and September 2017, Baidu released Apollo 1.0 and Apollo 1.5, respectively, which can achieve autonomous driving functions such as following the track and fixed lane.
Cars
Lincoln MKZ

This car is a customized modified car that Baidu ordered from AutonomouStuff, with a large AS logo on the car.
AutonomouStuff (https://autonomoustuff.com/), also known as AS, is a company specializing in providing modified autonomous driving cars. Not only Baidu, various autonomous driving start-ups would purchase unmanned driving modified cars from them before they got the support from vehicle manufacturers. Careful friends must have noticed that many start-ups (such as AutoX and JingChi) are based on Lincoln MKZ for autonomous driving research.
Why is that?
Because the underlying line control systems of the car are generally closed, and for safety reasons, vehicle manufacturers and Tier1 will not easily open them to the outside world.
What about start-ups without cooperation from vehicle manufacturers?
However, where there is demand, there is a market.
Thanks to the special relationship between AS’s founder and Ford, Ford has opened the control of Lincoln MKZ’s underlying line control system to them.
In addition to the Lincoln MKZ, they can also provide modified plans for the Ford Fusion and Toyota Lexus RX 450h (who knows how they got Toyota’s line control system).

Image source: AutonomouStuff
Do you think that they only provide modification plans for these three mass-produced models?
Naive! They also provide various types of vehicle models that satisfy different customer requirements.

Image source: AutonomouStuff
I think some car models are indeed suitable for universities and small teams to do autonomous driving.
ControllersThe controllers used in Apollo 1.0 and Apollo 1.5 are different.
Since Apollo 1.0 only implements the fixed GPS path patrol function and has no computing requirements at the perception level, a common industrial control computer – Nuvo-5095GC, as shown below, is used.

Image source: ApolloAuto/apollo
It looks really ordinary… and doesn’t look high-end at all.
Apollo 1.5 not only added a 64-line lidar perception module, but also added a high-precision electronic map engine. Therefore, a more powerful controller is required to complete obstacle detection and recognition functions based on deep learning or driving the high-precision electronic map engine. Therefore, they used this industrial control computer – Nuvo-6108GC.

Image source: ApolloAuto/apollo
Just looking at this heat sink makes it feel high-end…
Inertial Navigation System (INS) + GPS Antenna
Apollo 1.0 and 1.5 use the same set of location devices.
Apollo provides two INS solutions:
① The NovAtel SPAN-IGM-A1

Image source: ApolloAuto/apollo
② NovAtel SPAN ProPak6 and NovAtel IMU-IGM-A1

Image source: ApolloAuto/apollo
At this point, readers are likely confused by these complicated names and mysterious equipment. Don’t worry about it for now – just know that this thing is related to the positioning of the autonomous vehicle. I will focus on the role of the INS and why it is important in later articles.
The GPS antenna is very common, with different sizes and shapes. You often see a private car with a small antenna or a shark fin antenna on top. However, autonomous vehicles have high requirements for positioning, so their antennas look very big and bulky.The GPS antenna used by Apollo is NovAtel GPS-703-GGG-HV, which looks like the following image:

Image source: ApolloAuto/apollo
It is usually installed on the top of the vehicle, but it can also be installed on the trunk of the vehicle. The following image shows the installation positions of various sensors used in Apollo 1.0:
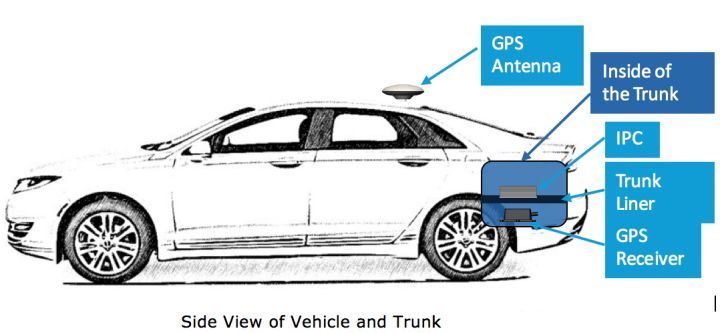
Image source: ApolloAuto/apollo
CAN Card
AS has opened up the bottom-line control system to Baidu, but the line control system only understands one language: CAN.
Computers only understand binary, but even if they figure out where to go, they cannot convey it to the line control system.
So they need a “translator” between them, and this is where the CAN card comes in.
Apollo 1.0 and 1.5 both use the same CAN card—ESD CAN-PCIe/402, which looks like the following:

Image source: ApolloAuto/apollo
64-Line LiDAR
The biggest difference between Apollo 1.0 and 1.5 is the LiDAR used, which is Velodyne HDL-64E S3. Let’s take a look at its installation position:
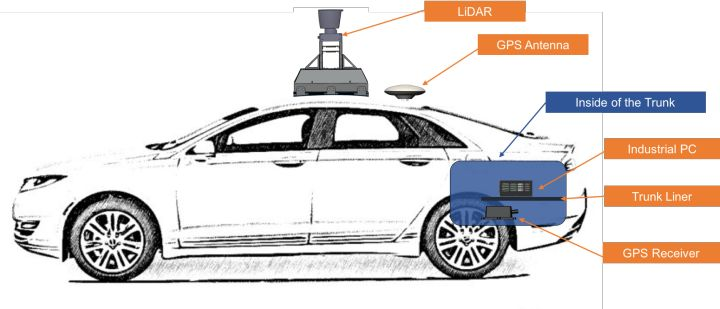
Image source: ApolloAuto/apollo
Yes, like many other vehicles, it is mounted on the roof to complete 360-degree laser detection.
Velodyne HDL-64E S3 is the most expensive LiDAR that can be purchased, and it is the only one that provides 64-line LiDAR solutions. Baidu and Ford are very optimistic about it, so both companies have invested in this company.
In the following sharing, I will introduce in more detail the principles of LiDAR and what features they can achieve for autonomous driving.
Conclusion
Well, this content basically introduces the hardware solutions of Baidu Apollo 1.0 and Apollo 1.5, as well as a low-key company behind them.
In the future, I will provide more detailed analysis of the sensors used in the Apollo plan, and I look forward to your reading.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.