Author: Tian Xi
A technical sharing session once again pushed “High-Precision Map” to the forefront.
Since 2022, “Heavy Perception and Light Map” has become a high-frequency term in the industry, and some autonomous driving companies have cited it to highlight their new achievements in single-vehicle intelligence. However, it can be easily found that this statement is prone to “stealing chickens” in terms of language.
The so-called “Heavy Perception” can achieve how much “heaviness,” and how “light” can the “Light Map” be, has no defined standard and entirely depends on the various rhetoric of the automatic driving company.
An industry insider stated that each version of “Heavy Perception and Light Map” he has heard is different. However, what can be confirmed is that whether it is L2+ or L4, high-precision maps are still essential for autonomous driving.
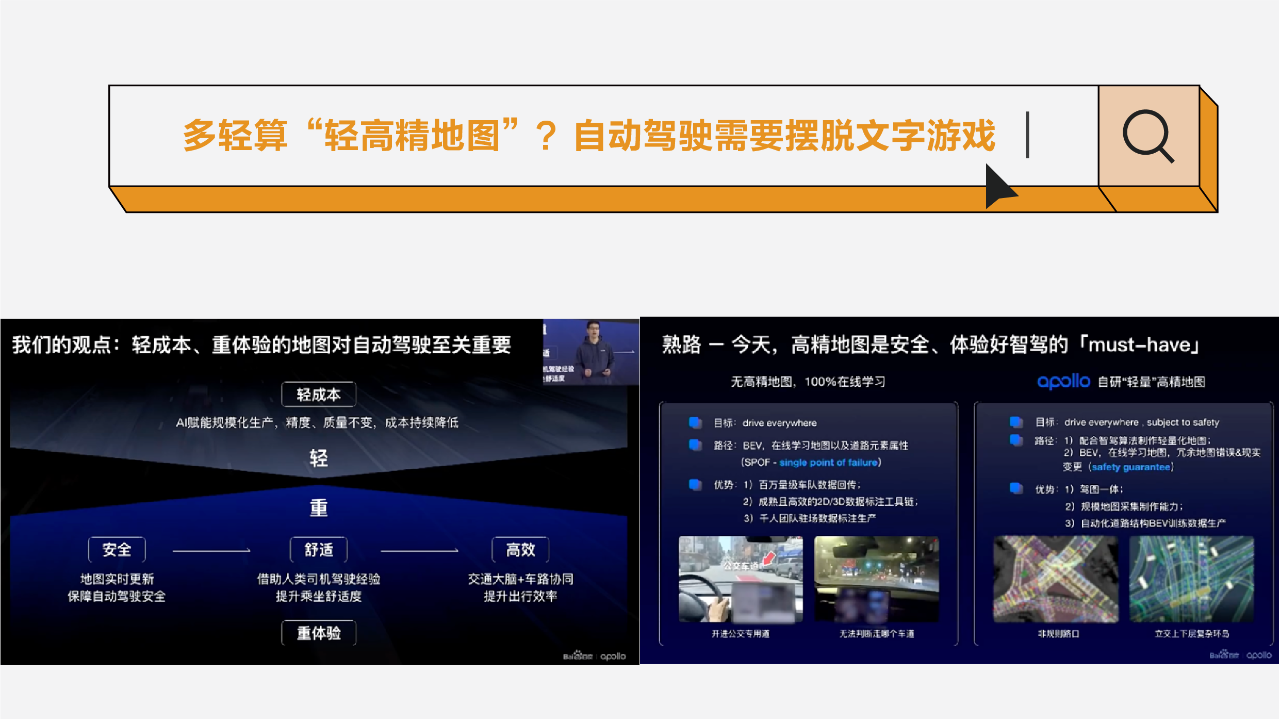
Recently, at the Baidu Apollo Day Technical Open Day event, Huang Jizhou, a Baidu autonomous driving technology expert, also emphasized this point and pointed out that low-cost and high-experience maps are crucial for autonomous driving.
Heaviness Perception and Light Map, originating from compromises with reality
In fact, “Heavy Perception and Light Map” have been mentioned repeatedly this year for a reason.
The most direct reason is that the supervision of the approval of the A-level qualification of high-precision maps is becoming stricter. In 2021, 31 companies obtained this qualification, but in 2022, only 19 passed the review, a sharp decrease of about one-third.
On August 30, the Ministry of Natural Resources issued the “Notice on Promoting the Development of Intelligent Connected Vehicles, Maintaining Surveying and Mapping Geographic Information Security.” It stipulates that the production of high-precision maps can only be carried out by units with A-level qualifications for navigation electronic map production.
This means that companies without relevant qualifications will either give up the “high-precision map” route or collaborate with qualified enterprises to support their own autonomous driving technology applications.
Although autonomous driving companies are desperately stacking various hardware, such as 8 million pixel cameras, lidar, powerful chips, and increasingly complex neural networks to enhance the perception ability of the vehicle, without the assistance of “high-precision maps”, various difficult-to-deal-with problems will inevitably occur in actual road conditions.
For example, when highway traffic signs are obstructed by trees, it is impossible for the intelligent car to perceive important prompt information in real-time, which can easily lead to violations of traffic rules or even traffic accidents.
The situation is even more complicated on urban roads, with diverse traffic lights, heavily soiled lane markings, and overlapping landmarks, all of which pose significant challenges to real-time perception.
High-precision maps contain prior information such as traffic signs, signals, guardrails, surrounding trees, lane markings, road edges, etc., and the accuracy reaches the centimeter level, which can help make up for the shortcomings of perception.
In addition, the high-precision map’s lane-level path planning function is also irreplaceable. Due to its ultra-long-distance perception, high-precision maps can “see” the high-speed ramp several kilometers away and assist vehicles in making lane change plans in advance.
For example, in continuous intersection turns on city roads, with the help of high-precision maps, vehicles can choose the optimal route in advance for smooth driving.
When negotiating sharp curves, vehicles can also decelerate in advance, ensuring a safe and comfortable experience for passengers, which cannot be achieved with limited visual perception hardware alone.
Of course, high-precision maps are not omnipotent. They have two significant drawbacks: high cost and low freshness, which form the other main reason for autonomous driving companies to try to take the “heavy perception, light map” route other than the lack of map qualifications.First, the cost is high. According to reports, using traditional survey vehicles, the mapping efficiency of centimeter-level maps is about 100 kilometers per day per vehicle, and the cost may reach thousands of yuan per kilometer. To cover so many roads in China means significant investment.
Professor Li Bijun from the State Key Laboratory of Information Engineering in Surveying, Mapping, and Remote Sensing at Wuhan University has stated that collecting road data nationwide requires at least 20 billion yuan.
For autonomous driving enterprises, high-precision maps are an unsustainable expense.
High-precision map updates are another major challenge. The commercial maps available can only update high-precision maps every three months. However, for autonomous driving, the ideal state is daily or even hourly updates.
Wu Xinzhou, Vice President of Autonomous Driving at XPeng, has said that he hopes the NGP can update high-precision maps at a “daily” level when it is released.
This is because the speed of updates for road traffic changes, maintenance, traffic light status, and other information is fast. If the map update frequency is too low, it will be difficult to support autonomous driving.
For example, an autonomous driving vehicle previously crashed into a newly constructed guardrail on the roadside due to the high-precision map not being updated in time.
It can be seen that high-precision maps play an essential role in autonomous driving technology, but the problem of high cost and low freshness is a hindrance to its full potential.
Baidu has a solution to this problem, as mentioned during its Apollo Day.
AI Empowerment: Baidu’s Solution to Reducing the Cost and Increasing Freshness of High-Precision Maps
Huang Jizhou introduced that Baidu uses AI to enable large-scale production and continuously reduce the production cost of high-precision maps. Specifically, it starts with automated data fusion and automated annotation.
The goal of automated data fusion is to automatically fuse sensor data such as laser point clouds or road images collected multiple times in a unified coordinate system. This is an important foundation and core capability for large-scale production of high-precision maps, and the challenge is to achieve centimeter-level accuracy.
Generally, commercial map producers first divide the sensor data into blocks or roads, and then fuse the data in each block one by one before concatenating high-precision features between blocks and adjusting the geometry to enhance the continuity of high-precision features between blocks.
However, this method has a significant drawback: it is difficult to ensure that the obtained basic data is completely aligned.”Our solution is to build a multi-level graph structure based on data distribution, ensuring the accuracy of the entire graph is consistent,” shared Huang Jizhou, and Baidu has made technological innovations in several areas.
Firstly, the multi-level graph optimization ensures the consistency of data fusion by establishing a local graph within the block; the keyframe association between blocks is used to establish a global graph between blocks, ensuring the accuracy of the entire graph is consistent.
Secondly, scene-based association and matching divides road sections into multiple different scenes and then designs association strategies and matching algorithms based on scenes.
Finally, a learning-based matching algorithm is used that simultaneously estimates overlap regions and extracts feature points using a network, only matching and extracting feature points in the overlapping regions, greatly improving matching robustness.
At the Open Day event, Baidu demonstrated the effectiveness of its automated data fusion, with the point cloud maps transitioning seamlessly with virtually no visible seams, while the results of traditional methods often exhibit severe misalignment at block boundaries.
“Our multi-level optimization method fusion results are completely correct.”
Automatic map annotation is the process of generating high-precision maps based on point cloud and image data, and it is also a core driving force that can significantly reduce costs and increase efficiency.
To achieve high automation rates, Baidu has made technological innovations in key steps such as feature recognition, vector extraction, and automatic modeling:
-In feature recognition, multi-level point cloud recognition is used, and the results are far superior to single recognition.
-In vector extraction, vector features extracted from point clouds and images are fused to ensure high accuracy and recall of features.- On the automated modeling side, the matching of vector features based on lane-level topology templates greatly improves the accuracy of topology generation and lane line connection.

Baidu has significantly reduced the production cost of high-precision maps through a series of AI technology applications.

To ensure the freshness of the map, Baidu uses fused vehicle perception data and multisource maps to generate online maps in real time.

On the vehicle side, Baidu uses the surrounding installed cameras and lidar to generate the Feature Map of BEV based on Transformer, and generates real-time maps.
Then, it effectively integrates them with high-precision maps and multi-source maps to generate online maps, which can be used by downstream perception, decision-making, and planning modules.
In this way, high-precision maps incorporate the characteristics of “prediction” and “real-time updating”, which can more efficiently adapt to the dynamic environment of autonomous driving.
As an example, Huang Jizhou points out that during severe weather, such as when driving home and encountering roads with deep water accumulation along the way, vehicles can actively avoid these areas and reduce safety risks through real-time and dynamic map data.
From L2+ to L4, lightweight high-precision maps connect unification
For Baidu, the fusion of high-precision maps and real-time vehicle perception is far from enough. To ensure ride comfort, higher requirements must be imposed on autonomous driving.
Example of Huang Jizhou driving off the highway from an exit ramp. Generally, exit ramps have clear speed limits, usually around 30 km/h. If a vehicle reaches a speed of 120 km/h at the exit ramp, immediate deceleration will result in a terrible driving experience for the passengers.
Similarly, on urban roads, it is common for traffic to converge. If a vehicle quickly merges into the lane from behind, the autonomous vehicle may hit the brake abruptly to ensure safety, which could affect ride comfort.
To solve this issue, Baidu proposed the introduction of a driver knowledge graph, which can learn from the unique data resources provided by the Baidu Map, covering over 12 million kilometers of road network and a daily track mileage of 2 billion kilometers.
“In this driving knowledge graph, there are multidimensional and abundant driving knowledge, such as experience speed, timing for lane changing, and trajectory for lane changing,” Huang Jizhou explained.
With the help of the driving knowledge graph, the speed conversion of autonomous driving can be more reasonable, lane changes can be made more timely, and turns can be smoother, significantly improving the riding comfort.
At the same time, Baidu also introduced vehicle-road coordination technology to provide real-time global traffic information such as road events and ETA, helping vehicles improve travel efficiency through intelligent signal control and planning.
“High-precision maps + real-time perception + knowledge graphs+ vehicle-road coordination” is forming the four-layer panorama of Baidu Apollo’s autonomous driving map from bottom to top.
At the bottom is the static layer, which contains the content of the traditional high-precision map, including lane-level data, topological data, and data for assisting vehicle positioning.## Second Layer: Dynamic Layer
The dynamic layer includes real-time traffic events, real-time environmental changes, and is built on massive spatial-temporal data and vehicle-road collaboration.
Third Layer: Knowledge Layer
The knowledge layer, also a Baidu original map of driving knowledge graph, is strongly related to safe driving and driving behavior and knowledge in relation to autonomous driving experiences.
Top Layer: Driving Layer
The driving layer includes the fusion of driving strategies, deep integration with map perception, decision-making, and control applications, and real-time data perception integration. It also includes data feedback loops and timely updates to ensure map accuracy.
“If Apollo’s autonomous driving map were to be defined in one sentence, it is a new generation of maps that enhance knowledge, are multi-layered, multidimensional, and designed for autonomous driving.” In terms of implementation, as summarized by Ji Zhou Huang, it is a low-cost, high-experience product.
In fact, the significance of maps is not limited to autonomous driving at L4 level. High-precision maps are an essential element of intelligent driving safety and passenger experience for L2+/L3-level urban advanced driving assistance systems.
By 2023, Baidu will launch a flagship L2+Navigation Assistance driving product, ANP3.0, designed for the market. It embodies the advantages of Baidu’s years of experience in high-precision map accumulation, offering car manufacturers a low-cost, broadly covered, and leading-edge product that allows intelligent driving systems to be activated anytime and anywhere.
Returning to the beginning of the article, the industry’s motto of “heavy perception and light map” is indeed inspiring, but in practical vehicle operations, it is full of mysterious meaning. On the one hand, the sensors provided by the vehicle side are far from capable of beyond-visual-range sensing and rich semantic understanding, in the same way that high-precision maps can. On the other hand, autonomous driving companies are striving to extend their operation range to more complex urban roads and parking lots.
The contradiction between these two points means that autonomous driving companies may say they don’t need maps, but their actions show that they are actually heavily reliant on high-precision maps. The amount of reliance varies from case to case, depending on how each company packages its message.
The approach provided by Baidu is to acknowledge the necessity of high-precision maps and make improvements to overcome its shortcomings. They achieve this by continuous cost reduction in map production through automated data integration, data labeling, and combining with real-time vehicle perception, knowledge graphs, and vehicle-road cooperation. This approach ensures both safety and comfortable riding experience.“`
Meanwhile, Baidu will unify lightweight high-precision maps for autonomous driving and advanced driver assistance as its Smart Driving ANP3.0 product launches in 2023. With the synergy of L4 and L2+ technologies, a positive feedback loop of “high utilization – continuous cost reduction” will be formed.
“`
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.