
On April 18th, Jidu Auto announced the latest progress of its first model, as seen from the pictures, the model adopts a through-style light strip and ADAS working indicator lights on the wheel arches, as well as two standing lidar sensors on the hood, which are more noticeable.


During the communication meeting, Jidu Auto also confirmed that the model of the lidar sensor is Hesai AT128, using a retractable design.
After the layout method was just exposed, Li Xiang, the founder of Ideal Auto, shared his thoughts on Weibo in Garage No. 42:
“Putting one on the roof and two on the hood or bumper, there is no difference in performance, and even the single one on the roof performs better. However, in terms of pedestrian collision, maintenance costs, and vibration control (linking to the main body), the roof is the optimal choice. The only problem is that the roof lidar sensor’s appearance needs to be adapted, because it looks too much like a mobile warrior-Gundam.”

Soon after, Jidu Auto CEO Xia Yiping replied to this comment, saying:
“There are still differences. A 120-degree FOV and a 180-degree FOV are different, and the solved corner cases are also different, so there are still differences in product capabilities, experience and even safety.”
At the point of mass adoption of lidar sensors, we have seen multiple automakers giving “roof”, “hood”, and “bumper” as different layout options, so we take this opportunity to take stock and see how each automaker chooses and what’s behind the lidar sensor layout?
First, let’s look at Jidu’s plan

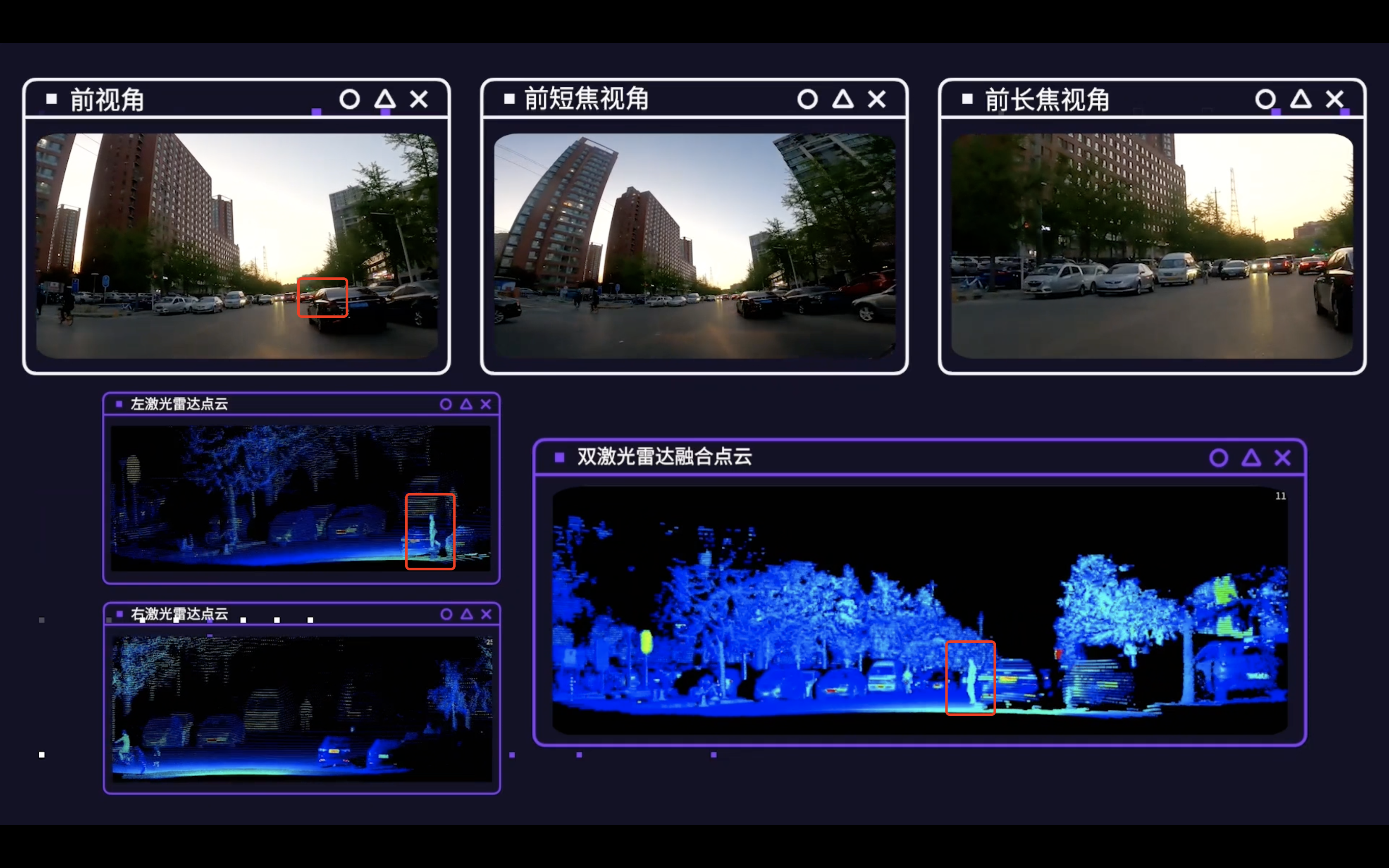
As can be seen from the figure, Jidu’s two lidar sensors are located on the left and right sides above the front of the vehicle, which is Jidu’s first layout method, and it adopts a retractable design.
The two sensors complete the 180° detection coverage of the front of the vehicle, and also achieve 60° dual-sensor coverage in the central core area of the vehicle.
From Jidu’s official website documents, we have summarized three major advantages:1. The front dual radar has a horizontal FOV of 180°, covering “ghost heads” and scenarios with obstacles on both sides, which enhances the recognition ability for pedestrians or obstacles crossing from left to right.
-
In the 60° FOV area directly in front of the vehicle, the dual lidar system achieves double overlap, providing richer point cloud data for more accurate recognition results.
-
The dual lidar system provides mutual safety redundancy, making its reliability stronger than single lidar solutions.
Firstly, a 180° detection angle lowers the visual blind spots on both sides by 30° when compared with a 120° angle, which is expected to boost the detection ability in scenarios such as ghost heads.
Moreover, the lidar covers not only the sides but also the front of the vehicle, which enables monitoring of the entire cut-in trajectory of a merging vehicle with only one lidar.
Here is a typical scenario of a ghost head. The vehicle parked on the right side blocks the detection of the right-side lidar, while the left-side lidar, situated further out and having a better field of view, can see the area in front of the vehicle.
It’s like our human eyes. When one eye is blocked, due to the larger visual angle of the other eye, part of the blind spot of the blocked eye can still be seen.
The second advantage is the dual radar coverage of the central 60° area, which can obtain denser point cloud information than using only one lidar, resulting in more accurate perception results.
However, obtaining more accurate perception results requires good fusion algorithms for lidar data, and the results output by two lidars must be highly compatible.
The third point is redundancy. The redundancy here has two meanings. According to JD, “The dual lidar system provides mutual safety redundancy, making its reliability stronger than single lidar solutions.“
There is no doubt about this. When one lidar fails, the other can continue to work, playing a role of redundancy to a certain extent, like a dual-motor electric car with two motors as redundant backup.
The second level of redundancy is at the system level. According to JD, “The pure vision and lidar autonomous driving solution being tested and developed in the SIMUCar 2.0 phase is an independent dual system that can achieve “true redundancy” after mass production. Compared with traditional solutions, the two autonomous driving solutions of JD complement each other and can work efficiently both independently and coordinately.”
So at the system level, vision and lidar are two separate systems that can work together or separately.
Here, I also speculate with caution that JD may be like Mobileye, where the lidar system can continue to ensure normal vehicle operation after the vision system malfunctions. In other words, the ADAS relying on vision can work independently, and the ADAS relying on lidar can also work independently.The validity of this idea has been challenged by industry experts, and former Huawei ADS executive Jing Su once responded to a media interview regarding a major autonomous driving company’s proposal to significantly reduce the required testing distance through independent testing of a “true redundancy” design consisting of both radar and LIDAR subsystems and a separate pure vision subsystem, with both subsystems’ takeover rates multiplied to achieve statistical significance.
“To be frank, I think that was probably written by their marketing department, not their R&D department, otherwise I would have to doubt their R&D capabilities. What really determines your takeover rate is not just your perception system; it has a lot to do with your regulation and control, perhaps even more than your perception system. Are these systems designed with a true redundancy?
Secondly, with most of those difficult-to-handle cases, even adding 80 sensors won’t be able to solve the issue. I guarantee it. So this method of multiplying the subsystems to achieve statistical significance is absurd.
True redundancy is a very marketing-oriented term. If you want to do perception well, you should do sensor fusion, not redundancy. Redundancy is a serious waste of sensors. Their level of technology is beyond this.”
Therefore, we have a wait-and-see attitude towards the concept of secondary redundancy.
Overall, the use of these two radars collectively has produced good comprehensive results, but Li Xiang expressed some different opinions.
When opinions differ
Li Xiang said: “Placing one on the roof and two on the hood or bumper make no difference in terms of performance, and a single one on the roof may even perform better. However, in terms of pedestrian collision, maintenance costs, and vibration control (linking to the main vehicle body), the roof is the optimal choice. The only problem is that the design of the roof-mounted LiDAR needs to be adapted since it looks too much like Gundam.”
Although this sentence is not long, it reveals Li Xiang’s consideration of six dimensions when deciding the LiDAR’s location:
- Detection performance
- Number of radars
- Pedestrian collision (safety)
- Maintenance cost
- Vibration control
- Appearance design
Automakers are racing to add LiDAR to their vehicles’ cores to achieve higher-order assisted driving, so performance must be the first priority.
Placing the radar on the roof has the great benefit of excellent detection performance, just as the higher a guard tower is built, the wider its detection range will be. This same principle applies to LiDAR.

Therefore, from a functional perspective, within a reasonable range, the higher the radar’s location, the better the detection performance will be. Therefore, placing the radar on the roof is definitely the optimal solution. In terms of alternatives, the hood would be the second best option, followed by the bumper.
However, Li Xiang’s core point here is that “placing one on the roof and two on the hood or bumper make no difference in terms of performance, and a single one on the roof may even perform better.”In both Ideal L9 and Jidu layouts, height is more important than quantity. Luckily, the AT128 from Hesai Technology is used as the LIDAR sensor for both Ideal L9 and Jidu, so we can exclude the effect of sensor performance and directly discuss the impact of sensor position and quantity on detection performance.
Subsequently, Jidu CEO Xia Yiping replied: “There’s still a difference. 120° FOV and 180° FOV are not the same. They solve different corner cases, so there are still differences in product capabilities, experiences and even safety.”
The core idea of the reply is that wider detection angle can bring stronger capabilities, solve more corner cases, and provide better safety.
Obviously, the two moguls were not talking about the same thing. Li Xiang said, “I have a higher height, so my one sensor is equivalent to your two.” Xia Yiping said, “My two sensors have a wider FOV, and better extreme case handling and safety performance.” However, it’s clear that both sides want to highlight the advantages of their products.
What can be confirmed is that higher height will definitely lead to better detection performance. As for the size of the detection FOV, it depends more on how car companies balance the relationship between extra 60° detection angle, safety redundancy, and double LIDAR cost.
Another undeniable issue is that putting LIDAR on the roof of the car has lower maintenance costs, more easily achieves pedestrian/cyclist protection, and provides better mechanical stability.
Currently, many car models put LIDAR on the front grille or bumper. For instance, the Audi A8, new Audi A7L, and Mercedes S-Class, as well as new energy vehicle startups like XPeng, WmAuto, Jihoo and Salon, all adopt such a design.
However, the original purpose of the bumper design is to protect the car body with better flexibility and cheaper cost, and it can reduce maintenance costs after minor accidents. Obviously, putting an expensive LIDAR in the bumper violates the original intention of reducing maintenance costs, so it is destined that such car models will have very high maintenance costs in case of rear-end collisions.The design of placing radar on the top of the car largely avoids the problem. After all, when the intensity of an accident is sufficient to cause the deformation of the car roof, the car is not far from being scrapped.
The second issue is pedestrian safety. With the increasingly stringent automobile collision standards, the requirements for pedestrian protection in collision safety are constantly increasing. In the design phase, vehicles need to fully consider pedestrian collision safety, which also puts higher challenges on the layout of bumpers and radars.
In addition, as a highly precise sensing component, the laser radar is not picky about the environment. The use environment of vehicles is bound to be harsh, so placing the radar high can also reduce the impact of mud and vibration on the radar to some extent.
Is it all advantages to put laser radar on the top of the car?
Of course not.
The biggest problem with placing it on the top of the car is “user acceptance.” After all, the appearance of laser radar breaks the traditional design of vehicles, and the first impression will naturally feel “awkward” or “ugly” if it is not accustomed to it.
The peak of controversy was when NIO first released the ET7, which was the first design to produce a car with a laser radar on the roof. Some users can accept the roof’s corners, but a larger wave of users cannot accept them.

In NIO’s view, the laser radar standing on the roof will become a symbol of “advanced assisted driving,” just as the tail wing is a symbol of performance cars.
There are also models such as LiXiang, FEV, GAC, and WM that are also placed on the top of the car. Seeing the design of these cars, it can be said that NIO has put a lot of effort into the design and tried its best to integrate the laser radar into the body and reduce the sense of abruptness.

Placing the laser radar in the position of the bumper can significantly reduce the presence of the laser radar.
At the same time, placing the laser radar on the roof will also increase the coefficient of wind resistance and bring greater wind noise. It also raises higher requirements for the NVH of the vehicle.
Conclusion
Where to place the laser radar depends on how the car company balances the relationship between “perception effect,” “appearance beauty,” “cost,” and “collision safety and maintenance cost.”
To make the most of the laser radar, it is generally placed on the roof, but it sacrifices the “harmony” of the appearance. For example, XPeng G9 has a lower dependence on radar in the automatic driving team, and it plays more of a complementary role, so the priority of appearance can be placed in a higher position.
Jidu can be said to have taken the advantages of the above two, with good detection capabilities while also ensuring the harmony of the appearance. Of course, it may be too early to draw a conclusion now, and to put it another way, the Jidu solution also has two common shortcomings.Finally, having a LiDAR sensor does not necessarily mean strong assisted driving, and the quality of its location does not represent the strength of its ability. LiDAR is just a hardware component, and the actual experience depends on more core software algorithms.
Lastly, feel free to download the Garage App to keep up with the latest new energy news. If you want more real-time communication, you can click here to join our community.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.