
Author: CH_Chen Han
Serving people with “Technical Power”.
In January, after the release of BYD’s high-end brand “YAWS” (Young, Advanced, Wisdom, and Safe) on the Internet, it continued to cause heated discussions. Besides its positioning in the million-level price range, the most discussed topic was naturally its “Easy Four Directions” four-wheel independent motor technology.
All models under the YAWS brand will be equipped with the “Easy Four Directions” technology, which uses four wheel-side motors to drive each wheel independently, achieving complete independent drive of a single wheel.
The four-wheel independent motor fully leverages the advantages of the electric motor’s small size and high power density, accomplishing things that were once impossible for gasoline cars. Moreover, unlike the centralized drive we are used to, the four-wheel independent motor belongs to distributed drive, which also has differences in design and tuning ideas.
What is impressive about the four-wheel independent motor? Does it represent the ultimate form of automobiles?
Last week, BYD YAWS held a technical exchange meeting, and we can explore it firsthand.
4>2, More Motors Mean More Power
Firstly, the most obvious advantage of the four-wheel independent motor is that the power can be larger. Compared with the commonly found dual-motor models on the market, four-wheel independent models have two more motors, and a 1000 horsepower is not a problem.
According to official introduction, the electric drive assembly mounted on the “Easy Four Directions” platform has a maximum horsepower of more than 1100bhp, a maximum motor speed of 20500rpm, and an acceleration from 0-100km/h in about three seconds. Meanwhile, all YAWS models will come standard with an 800V high-voltage SiC silicon carbide electronic control, with a maximum efficiency of 99.5%, achieving high-efficiency drive.
Secondly, the four-wheel independent motor will greatly improve driving stability and safety.
In the past, the vehicle body control system usually used wheel speed sensors to determine whether the wheel is slipping, and then control the attitude of the vehicle through ESP by braking the wheels. Vehicles equipped with four-wheel independent motors can determine slipping/losing control tendencies more quickly and accurately through the load and speed of each wheel-connected motor. They can also execute the action of dealing with slipping/losing control more directly, directly adjusting the motor speed and direction to control the vehicle’s posture.Theoretically, the model equipped with four-wheel electric motors can make full use of the tire’s adhesion to achieve more extreme limits and obtain faster cornering speed. When driving on ice or snow, or when the vehicle loses control at high speed, the vehicle can also regain adhesion faster through millisecond-level motor rotational speed and torque control.
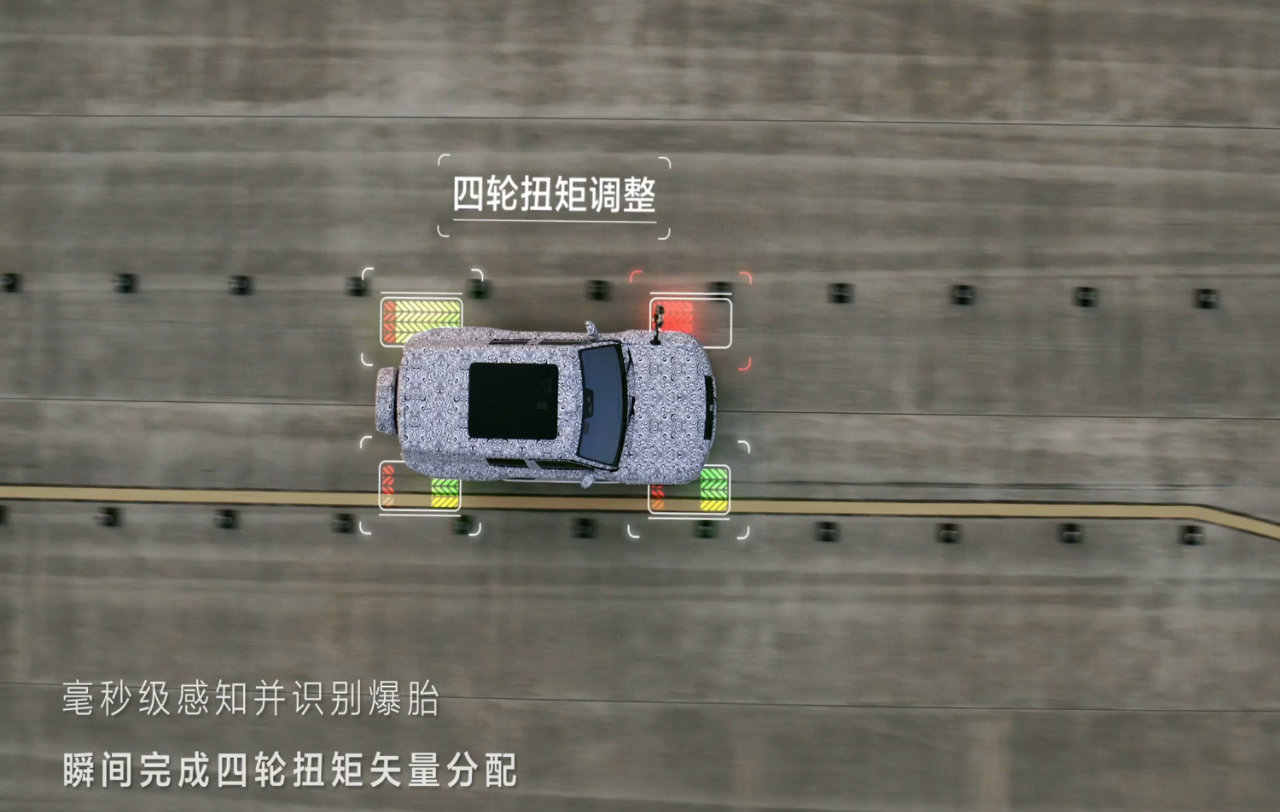
In the previous publicity, BYD’s first model U8, a large tough off-road vehicle, also demonstrated its ability to stabilize the body after a high-speed blowout.
When a wheel blows out and completely loses control, the wheel-side motor can respond quickly and continuously adjust the torque of the four wheels at a high frequency, making the remaining driving wheels maintain adhesion and controlling the vehicle posture to avoid losing control. BYD claims that even when a single wheel blowout occurs at a speed of 120 km/h, this technology can make the vehicle stop stably and controllably, avoiding the occurrence of secondary accidents to the maximum extent, which traditional cars cannot achieve.

Finally, four independent electric motors can also do many “tricks”, such as “turning around in place” and “emergency floating mode”.
The traditional “tank turn” is achieved by braking the inner wheel to make the vehicle rotate. The “turning around in place” function developed by BYD U8 is achieved by reversing the inner wheel to rotate around the center.
Compared with the traditional “tank turn”, the turning control of BYD U8 is more accurate, the steering is more flexible, and the applicable scenarios are more numerous. Through different speeds and steering combinations of the four wheels, theoretically, this function can realize rotation with variable radius and center, and the center of rotation is not necessarily the center of the vehicle.
Driven by four powerful electric motors, the “turning around in place” function of BYD U8 can also be easily used on high-adhesion surfaces such as concrete or asphalt roads. In daily narrow turns and parking, this function can also reduce the turning radius, making the vehicle more flexible when turning.
 The “emergency floating mode” utilizes the Bernoulli principle and controls the different speeds of the four wheels to create a difference in water pressure, thereby propelling the vehicle to float on water.
The “emergency floating mode” utilizes the Bernoulli principle and controls the different speeds of the four wheels to create a difference in water pressure, thereby propelling the vehicle to float on water.
For example, when a right turn is needed, the right wheel can be rotated quickly. According to the Bernoulli principle, the faster the flow velocity, the smaller the pressure. Therefore, the water pressure on the left side of the vehicle will be greater than on the right side, and the vehicle will turn right.
This function also requires the waterproof ability of the core components of the U8, which has an IP68 level, to ensure the short-term floating requirements.
It is important to note that this does not mean that the U8 can be used as a boat! Because the principle of this function determines that the driving force it can generate on the water surface is relatively small. In public waters with fast water flow, the driving force of the vehicle may not withstand the impact of the water flow.
Therefore, BYD repeatedly emphasized that this function is only for emergency use, and the main use scenario is urban waterlogging or emergency self-rescue when the vehicle enters deep water. It is not recommended to use it frequently as a regular function.
Four motors, the difficulty lies in control
Connecting four motors to the wheels is not a difficult task. However, controlling the power output of four motors is much more complex than imagined.
Take the “turning around in place” function as an example. It is well known that the outer wheel should rotate forward and the inner wheel should rotate backward to achieve this function. However, the specific rotation angle and speed of each wheel requires repeated debugging and matching.
“The slower the speed, the harder it is to turn around in place.” At the technical exchange meeting, BYD’s technical experts introduced this concept because the slower the speed, the finer the control of the rotation of each wheel.
Through years of technical accumulation, the U8 can now achieve the slowest rotation rate of only once in 3 minutes. In addition, to avoid rapid tire wear, BYD has carried out targeted adjustments to reduce the sliding friction between the tires and the ground while ensuring the steering effect.
For the variable center of turning around in place mentioned above, it requires even more complex four-wheel control, which has not yet been reflected in the U8 and may need to be added through OTA in the future. However, the U8 will set several steering angles in advance, such as 30°, 90°, etc., to make it more convenient for users to use.
Apart from controlling the rotation of the wheels, safety is also a major concern when performing a U-turn, especially considering that not many people have this driving experience. To address this, Yungang will utilize body cameras, LIDAR, millimeter wave radar, ultrasonic sensors, and other sensors to intelligently prevent collisions. However, the specific effectiveness of these measures will only be experienced after the actual vehicle is released.
Furthermore, four independently operated electric motors also place higher demands on the electric control system’s logistics support. The output power of four motors exceeding 1,000 horsepower certainly requires high-power batteries and a stable power supply as backup.
Based on current information available, Yungang will definitely have a plug-in hybrid model that uses range-extending hybrid technology. Due to the four-wheel motor, distributed drive architecture, engine direct drive has lost its relevance, having inferior power and complicated structure compared to four-motor drives.
Essentially, the vehicle only needs a “generator” to ensure its endurance, but this “generator” must be very powerful. Otherwise, it will fall into the predicament of “full power a dragon, no power a worm.”
Therefore, BYD definitely has a super-strong range extender not yet released, but its specific parameters and power backup capacity are worth looking forward to.
Application scenarios need further expansion
Four-wheel independent drive can be regarded as a completely new category of automobiles with only a few companies capable of mass-producing them. The new application scenarios that it can bring still need to be explored.
Currently, the most significant benefit of four-wheel independent drive is in terms of safety. It can make vehicles more stable, have better anti-skid control, and provide dual redundancy for the power and steering systems for autonomous driving, even if the steering wheel fails. This is achieved through differences in the speed of the four wheels.
However, whether four-wheel independent drive represents the ultimate form of automobiles still depends on its ability to provide users with more value and explore richer use cases.Just as no one could have predicted the revolutionary era of mobile internet brought about by the emergence of 4G technology, we cannot accurately predict the impact of the four-wheel independent drive technology on automobiles today.
Waiting and looking up give us more answers.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.