“One has martial arts skills but no brains”
Currently, the NOP+ version being used by the Navigation Team gives an impression of very strong basic capabilities. It can recognize exaggerated numbers of lanes and vehicles, and can perceive the relative positions and slight movements of vehicles in its field of view. The following aspects can help you to realize the strong basic abilities of NOP+:
- On the overpass lane, it can still recognize vehicles on the ramp of the upper elevated road below the main lane. (Although it is not known whether this wastes computing power)

When there is congestion in multiple lanes, if adjacent lanes have more than 100 meters of space and they are not moving faster than your own lane, then it will not change lanes. (However, humans may change lanes for a 100-meter advance)
When there is a large vehicle in the adjacent lane, it will adjust its position toward the other side to create space; and when vehicles in the adjacent lane show lane-changing intentions and move towards the lane line, it is highly likely to trigger deceleration (So why not control the distance like the large vehicle instead of choosing deceleration?)
When a vehicle approaches from behind after shifting to another lane and the space is sufficient for a lane change, it will resolutely accelerate immediately after the lane change. If the conditions for lane-changing are disrupted by an accelerating vehicle behind, it will safely return to the original lane, without the need for manual control.
When it is necessary to change lanes but the target lane does not have the necessary conditions, it will attempt to find a suitable space for the lane change by accelerating or decelerating. (Apparently, due to the reason that the Lidar is in front, it tends to choose the space in front of the vehicle rather than behind. If the target lane is congested, the space behind will never be explored.)
After praising its martial arts skills in a sarcastic way, let’s talk about the “no brains” part.
From a week’s experience, it was clearly perceived that NOP+ bases its decisions on a set of predetermined decision-making rules, without any “intelligence” being demonstrated. In the same position with the same predetermined conditions, it will always execute the same action. Factors outside of the predetermined conditions are not considered at all. Therefore, the NO alpha version’s experience relies heavily on NIO’s sophisticated manual tuning. I even suspect that NIO’s vehicle firmware contains a database with a set of logical rules that are specifically adapted for non-applicable intersections on high-precision maps.# NOP+ Adapts Different Decision Logics According to Traffic Conditions
NOP+ can currently adapt to different decision logics based on the traffic conditions ahead. In situations where there is less change and a larger traffic volume on highways, the driving experience should be very good. NIO also stated that they would test every road that opens, and the main roads will undoubtedly be tested more because every branch road needs to go through the main road again. In contrast, elevated ring roads and bypasses around cities often have many problems due to changing situations, and the road design and marking are not as standard as highways. Below are some examples:
- When entering a multi-lane ramp, the system will enter the fixed lane set in advance, without considering the distribution of vehicles on the ramp (although the lidar can see it clearly) or the difficulty of merging into the main road after exiting the ramp (clearly shown on the high-precision map). When humans are driving, they generally enter the far-right lane of the main road in advance, then smoothly merge into the far-right lane of the multi-lane ramp, and travel close to the right guardrail throughout the journey, without being disturbed by vehicles coming from the rear right. If there is no condition to merge into the far-right lane, they will observe whether there is an opportunity to change to the left lane of the ramp and decisively accelerate to merge.

- When merging the ramp into the main road, the system also enters the predefined fixed lane. When humans are driving, they generally choose which ramp to merge into the main road based on the traffic on the main road they are about to merge into. In most cases, they will also choose the far-right ramp to merge into the main road along the guardrail. When the traffic on the main road is extremely small, or when they cannot enter the far-right ramp, they will choose the far-left ramp to exit because the distance for changing lanes between the far-left ramp and the main road is very short, and the opportunity to merge into the main road is fleeting.
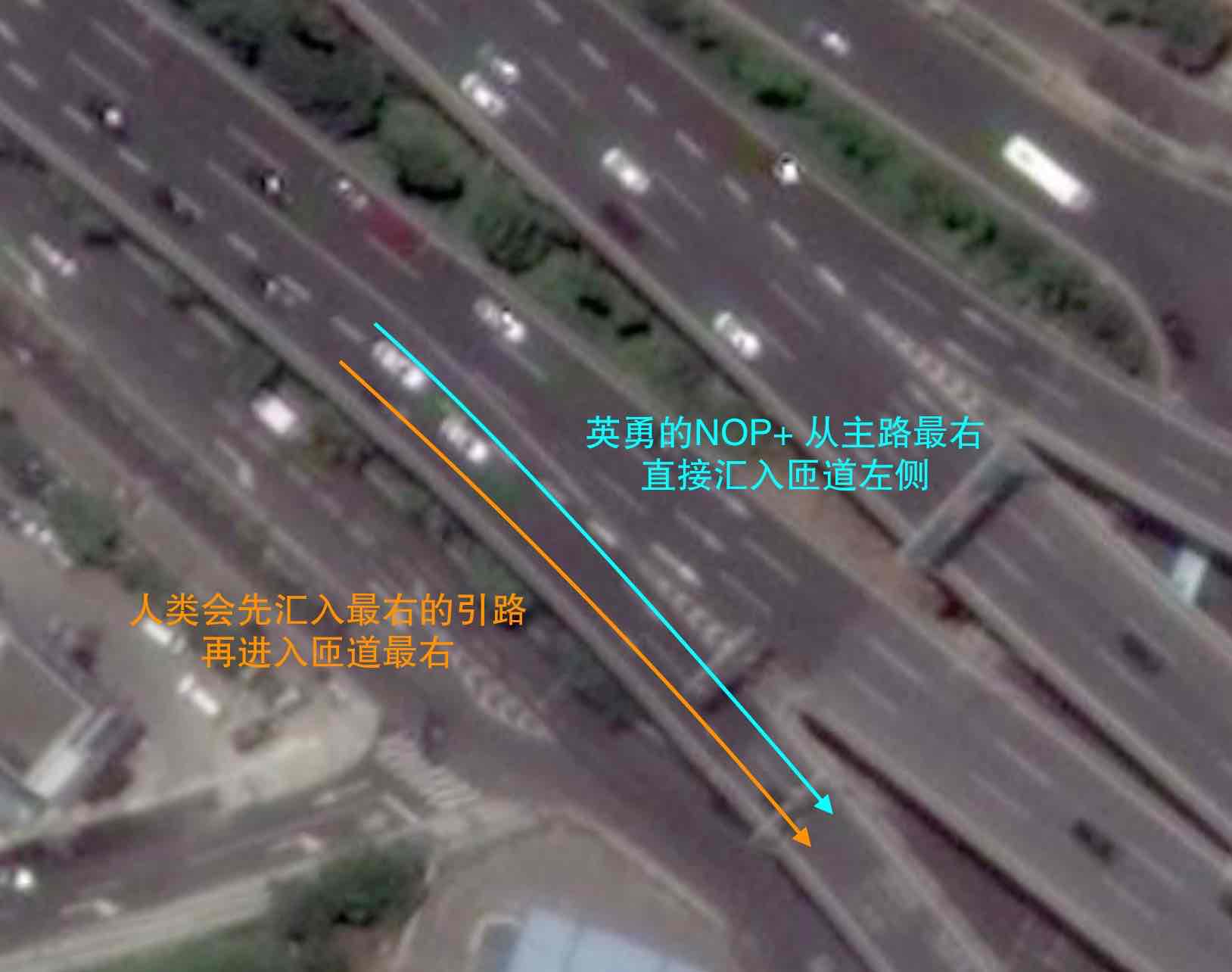
Combining the first two points, it can be concluded that NOP+ currently completely relies on predetermined route rules for selecting lanes on multi-lane ramps during main road switching. The traffic flow on the ramp and the main road will not have any impact, and changing lanes or overtaking will not be triggered on the ramp. (Or maybe I haven’t observed it)
- When approaching the line dividing solid and dotted lines, if the speeds on both sides of the line are similar, humans generally choose to drive on the dotted line side because there is an opportunity to change to the solid line if the speed slows down on the dotted line side. If they choose the solid line side, they will not have a chance to make another choice before the line ends. NOP+ currently does not have the concept of “opportunity.” In most decisions, NOP+ only considers the current situation, and does not consider whether the current choice will provide more “opportunities” for subsequent operations.

- When there is a merging lane merging into the main road, NOP+ does not take into account the traffic situation of the merging lane. When a vehicle is about to encounter merging traffic from the merging lane in front of the rightmost lane, if it does not overtake a slow vehicle or change lanes due to the exit ramp logic, it will mechanically continue to drive forward until it is stopped by the merging vehicle before considering changing lanes. When humans encounter this situation, if the rightmost and right-second lanes are almost the same, they will choose to enter the right-second lane first to avoid potential merging risks.

Combining the above two points, it can be inferred that at present, when making decisions, NOP+ does not consider the subsequent operating space as a decision-making condition, but makes mechanical judgments based on the current situation and preset goals.
- When NIO is about to switch lanes, it will choose to increase the distance with the front vehicle to obtain a larger field of view and find more opportunities for lane changes. There is nothing wrong with this, but if it is a hard-coded logic, the problem is significant. When the vehicle in front is a bus, this decision is wise, but if it is a small car, a MiniEV, or a motorcycle, it is strange to do so. Even more ridiculous is that if the vehicle enters the rightmost lane 300 meters in advance, NOP+ will still stupidly maintain extra distance with the front vehicle for 300 meters until entering the ramp. Normal humans would choose to shorten the distance first and then control the appropriate distance when approaching the ramp to obtain a better view.

It can be inferred that the distance control made by NOP+ to ensure visibility is a constant value, which is not adjusted based on the obstruction of the field of vision. In many places, NOP+’s decision-making logic is based on a constant rather than feedback results, which is not intelligent.
- Although NOP+ can perform a beautiful “overtaking without reducing speed” when approaching a slow-moving vehicle in front of the lane, when the speed of the vehicle is affected and there is a slow vehicle invades its lane, this skill will fail. It almost changes lanes only after the slow vehicle has fully merged, but it can be seen that if the merging speed of the slow vehicle is slow, the lane change overtaking will be triggered before it is fully merged. Therefore, it is difficult to determine whether it is a slow decision-making or a logical problem.> 7. When it is necessary to enter the ramp for a change, if the target lane is congested with no opportunities to change lanes, NOP+ will adjust the longitudinal relative position of the traffic flow between adjacent lanes to find different gaps. However, the entire process feels very slow in terms of decision-making and does not approach an empty space like a human being, but rather loses the opportunity during the slow decision-making and execution process.
Combining 6 and 7, it can be considered that there is still a perceptible delay in the decision-making speed of NOP+. This delay can be more clearly perceived at the moment of opening NOP+. When all the conditions for triggering overtaking of slow cars are met, NOP+ still needs to wait for a very small delay before the vehicle changes lanes.
- The last little dissatisfaction is when the ACC is about to end. If you are on a multi-lane ramp, the ACC will not send you to the correct lane according to your subsequent direction. It will not send you to the left lane of the ramp if the subsequent route is left-turning, or to the rightmost lane of the ramp if the subsequent route is right-turning. NOP+ will only send you to a fixed ramp, which feels particularly good when it coincides with the route you usually take, and particularly bad when it does not. Everything is fixed.
Conclusion: The current situation of NOP+ is like Guo Jing who was trained well by Huang Rong. Everything that Huang Rong can think of is done very well, but anything that Huang Rong did not think of will be exposed immediately.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.