
Introduction
In the current debate over autonomous driving routes, in addition to the long-standing confrontation between the pure visual faction and the fusion of lidar and visual faction, the debate over whether to use high-precision maps is also incessant. On the one hand, the use of high-precision maps is an unsustainable path due to the difficulty of obtaining qualifications under current strict supervision and its cost. On the other hand, autonomous driving with high-precision maps can undoubtedly play a higher role and improve the safety performance of autonomous driving.
Currently, with the “vision + multi-sensor + high-precision map” assisted driving solution, some assisted driving functions have already been implemented. Huawei’s Yu Chengdong once said that autonomous driving cannot rely too much on high-precision maps and vehicle-road coordination, otherwise “smart driving and autonomous driving capabilities will not improve.” He XPeng from XPeng Motors also stated that “high-precision maps are definitely transitional.” Li Bijun also said, “Autonomous driving definitely cannot do without maps, but whether high-precision maps are necessary is yet to be determined.” So is abandoning high-precision maps really the optimal solution for future autonomous driving, especially as it has been questioned by many industry giants?
Abandoning High-Precision Maps?
First of all, in order to clarify whether it is necessary to abandon high-precision maps, we need to understand what high-precision maps or navigation maps can provide for autonomous driving?
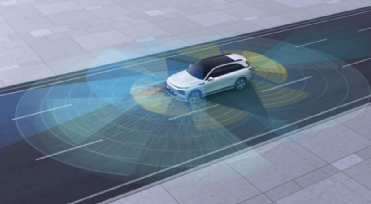
In addition to providing basic geographic location information, ideally, whether it’s navigation or high-precision maps, it can supplement a lot of information that can’t be obtained through vehicle perception, such as road speed limits and traffic signals at farther distances. It can be said that with high-precision maps, the vehicle’s vision can be expanded by an order of magnitude, allowing more time for the decision-making and planning system on the vehicle to process information, making it possible to make more reasonable and safe decisions.
On the other hand, high-precision maps can to some extent reduce the amount of computation required for sensors such as cameras to recognize and judge the surrounding environment information. We know that as autonomous driving progresses from L2 to L5, each level increase means an order of magnitude increase in computing power, and the stacking of computing power often means higher cost. In order to accelerate the large-scale landing of autonomous driving, consideration of computing power redundancy is also essential.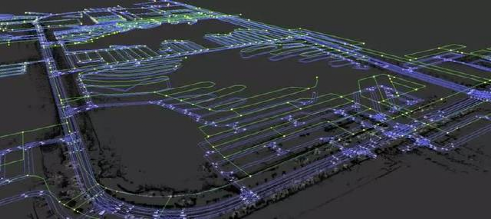
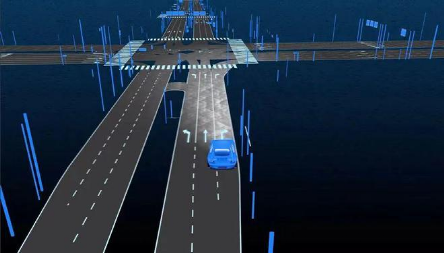
Undoubtedly, high-precision maps can enable autonomous driving systems to perform better. However, for driving routes that are relatively fixed, like highways, high-precision maps are not necessarily required. In fact, the industry still tends to reduce its reliance on high-precision maps. Firstly, obtaining Class A surveying and mapping qualifications is difficult, there are limited domestic suppliers, and data compliance review continues to present challenges. Secondly, the high cost of front-end mapping, as well as the back-end update and maintenance make it difficult to justify the investment. This has highlighted the need for self-research and development.
Difficulties in Implementing High-Precision Maps
Although high-precision maps are remarkable, vehicle manufacturers cannot ignore the high cost of initial construction, and the subsequent maintenance and updating. Given that it is especially challenging for automakers to obtain their own high-precision mapping qualifications, why not collaborate with high-precision map suppliers?
On one hand, there are only more than 20 companies in China with Class A surveying and mapping qualifications for electronic navigation map production. Approval standards are becoming more strict, and the high-precision mapping industry in China now has a virtual monopoly comprising mainly of the four technology giants: Baidu, Alibaba, Tencent, and Huawei (BATH), who have limited the space for cooperation between map suppliers and automakers.
On the other hand, there is currently no unified standard in the high-precision mapping industry. You may have seen vehicles collecting map data while on the road, but hardly ever see identical vehicles. In the aspects of high-precision map collection, content preparation, data format, publishing and transmission, and update frequency, there are no industry standards. Although there are only a few suppliers in this market, each of them has their own distinct form of standards and characteristics, resulting in resource duplication within the industry. This also means that, once a car manufacturer chooses to work with a certain map supplier, it would be incredibly difficult to switch to a different one later on. No automaker wants to feel tied to a certain map supplier; they all want to have complete control over their own destiny.“`
The problems with high-precision maps when put into practice have limited the automakers’ performance. In the field of urban assisted driving, which heavily relies on high-precision maps and cannot avoid legal restrictions, the idea of using software algorithms to solve the problem of insufficient hardware capabilities naturally emerged for automatic driving companies, which is their strength.
Automatic Driving Route with Light Maps and Heavy Perception
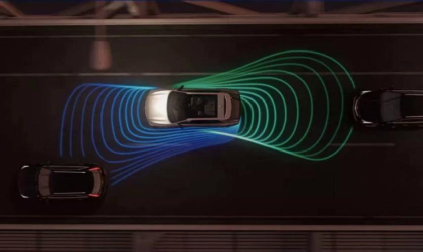
Against the background of difficulties in the implementation of high-precision maps, more and more new automakers, relying on their strong automatic driving algorithm capabilities, have determined to abandon the automatic driving map and take the new path of “light maps and heavy perception”. Undoubtedly, this is a great challenge for the current automatic driving technology to land, but it is the way humans drive. Even more radical representatives have taken a pure visual route and achieved good results.
So how to interpret this new route of heavy perception and light map for automatic driving? I think it can be interpreted from three aspects:
First, the ability of human eyes and brain should not be underestimated. Although pure vision is the natural way for humans to drive, humans have extremely strong brain intelligence, which can continuously learn based on accumulated experience to make up for the lack of perception ability. With the extremely strong brain intelligence, humans can sensitively predict and identify dangerous situations in advance, make the most reasonable and safe decisions at the moment, and this ability will continue to improve with driving experience. Although there have been successful cases of reinforcement learning in artificial intelligence, it still needs considerable time and technological accumulation to be applied in such complex driving scenarios.
Secondly, technically speaking, the relationship between the imaging plane generated by visual perception and the center of the camera in the world coordinate system used downstream for decision-planning is extremely complex. The conversion process may be affected by precision errors, leading to abrupt changes in the results and the downstream module of rule control cannot be used normally.
Thirdly, perception ability is affected by harsh weather. In heavy snow and fog, even with human eyes, it is sometimes difficult to accurately distinguish obstacles in front of them, which is even more difficult for automatic driving. With the current level of technology, a pure visual automatic driving without the support of high-precision maps still faces significant challenges to complete automatic driving tasks safely in harsh environments.
“`## Summary
At present, high-precision maps are still one of the essential core technologies for car manufacturers to achieve autonomous driving function. At the recent Apollo Day event, the leading domestic autonomous driving company Baidu expressed that high-precision maps are crucial for achieving high safety and sustainable L2+ intelligent driving products and are irreplaceable. For L4-level autonomous driving, high-precision maps are one of the essential core capabilities to achieve a success rate of over 99.99%.
In the future, with the gradual improvement of car manufacturers’ perception and decision-making technology capabilities, as well as the gradual implementation of car-to-road coordination at the government level, in the context of the real parallel development of single-vehicle intelligence and car-to-road coordination, high-precision maps may become less critical, and autonomous driving will no longer depend on the limitations of high-precision maps.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.