Author: Zhu Yulong
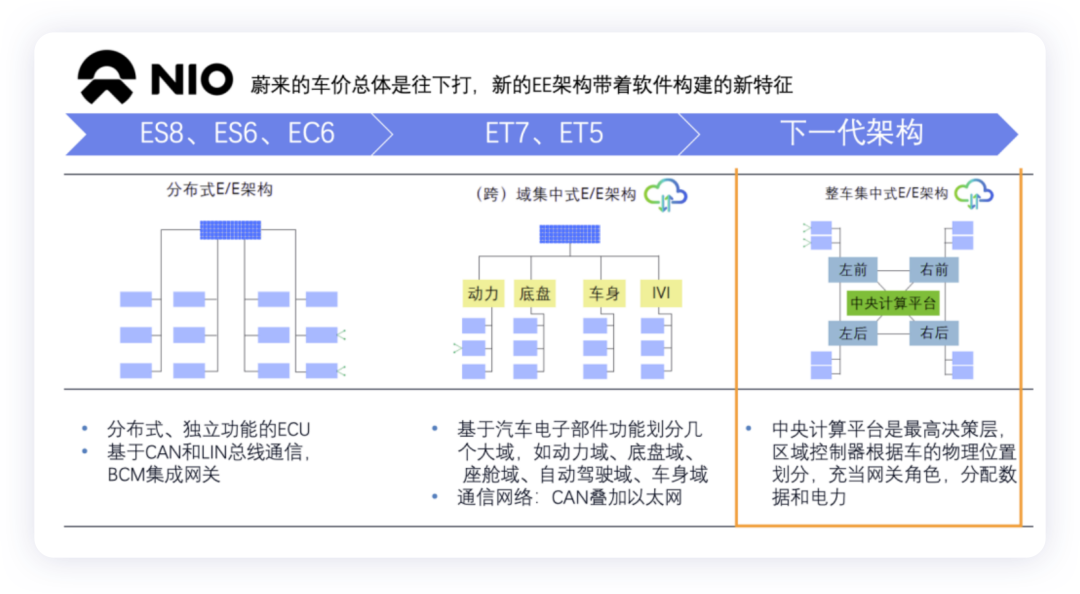
Recently, NIO released a report titled “Consideration of NIO Area Controller Architecture and Integration of Multiple Controller Software”, which is the first time to reveal its next-generation electronic and electrical architecture at a technical forum. The main purpose of NIO’s upgrade of the EEA architecture is to keep up with the trend of smart car iteration, achieving software reuse, rapid iteration, flexible and speedy deployment, software platformization, and high internal coherence and low coupling of code.
Strictly speaking, the high intelligence of most vehicles is aimed at making the hardware system platform capable of charging software fees, continuously platformizing the price of vehicle hardware, and lowering the price while allowing consumers to choose whether to purchase value-added new software.
Next-Generation Electronic and Electrical Architecture Planned by NIO
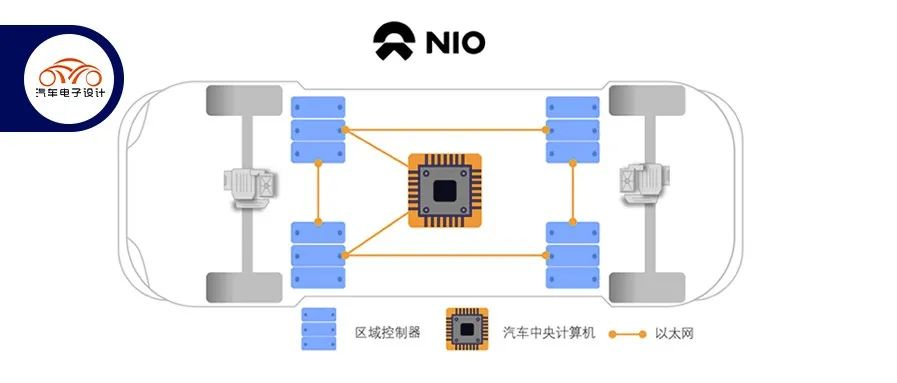
Like most global automakers, NIO engineers also chose a region controller architecture for their entire EEA system, which consists of a central computing unit and a region controller, connected via on-board high-speed Ethernet to construct an adaptive and self-learning system, supporting a wide range of intelligent and interconnected functionalities.
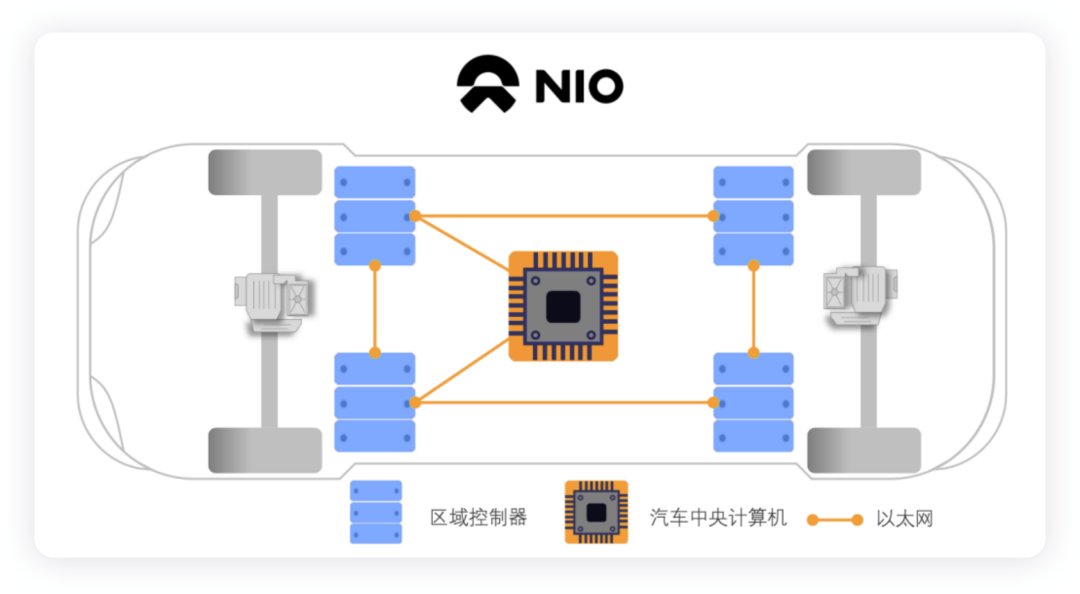
This EEA architecture supports a redundant system with fail operation through ring topology and has good scalability. NIO’s central computing unit has a performance of over 1000TOPS and a clock speed greater than 1GHz, and this information may refer to the current Adam supercomputing platform with the NVIDIA Orin chip as the main controller.
Note: This next-generation system will not be available until at least the end of 2023 or the beginning of 2024, and it is not clear whether it can be transitioned to the next-generation platform.
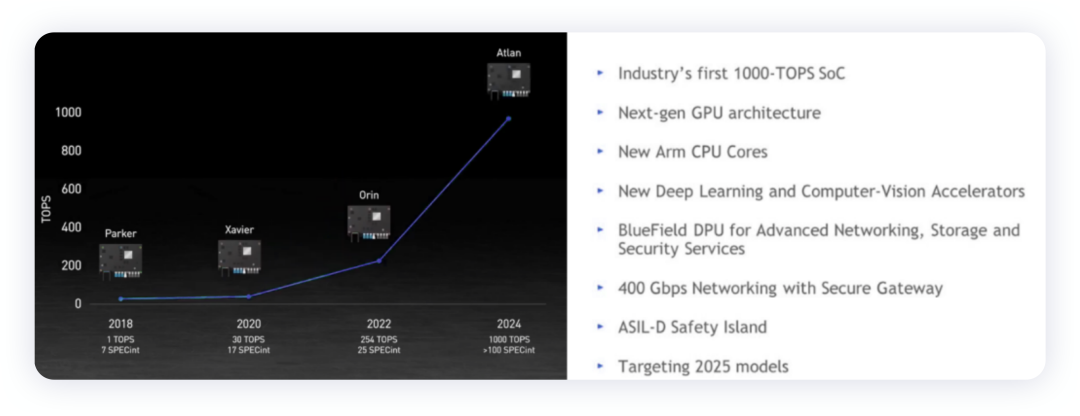
Currently, NIO’s Aquila system mainly focuses on automatic driver assistance, consisting of four DRIVE Orin System-on-Chips (SoCs) with a computing capability of more than 1000 TOPS. Two Orin chips are responsible for processing perception data from vehicle sensors and automated driver assistance decision-making, one Orin serves as a backup to ensure functional safety, and one Orin supports local training to improve learning through fleet-based training. On the Atlan platform, the cabin system might be integrated.The main functions of NIO’s Area Controller include:
- Distributed edge computing framework
- Vehicle control arbitration center: to achieve service judgments of different priorities and ensure certain information security processing
- Information communication network oriented towards SOA service communication
- Centralized data center for the area: distribute data through Ethernet, CAN and LIN networks
- Vehicle power distribution hub: with many E-fuses to coordinate distribution
- Obtaining data from intelligent sensors and controlling the behavior of intelligent actuators
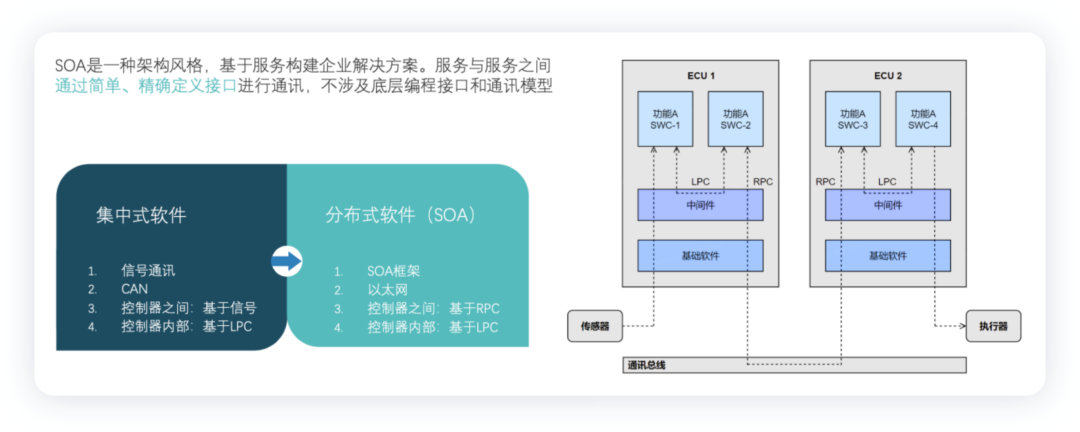
The foundation of intelligent cars lies in a platform-oriented, highly cohesive and loosely coupled, with high reusability and flexible deployment characteristics. Automotive software architecture must be service-oriented and widely use middleware. The development and adjustment of automotive software is a restructuring of the existing software architecture and the introduction of Remote Procedure Call (RPC).
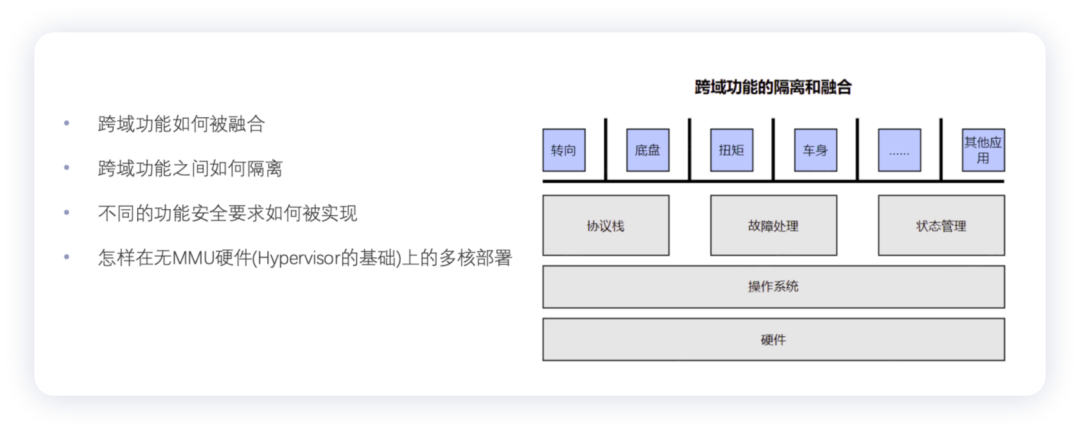
Challenges of the Area Controller’s Basic Software
Implementing cross-domain functional integration and isolation requires multi-core deployment, isolating various functional safety systems, such as steering, chassis, and torque control of the powertrain.
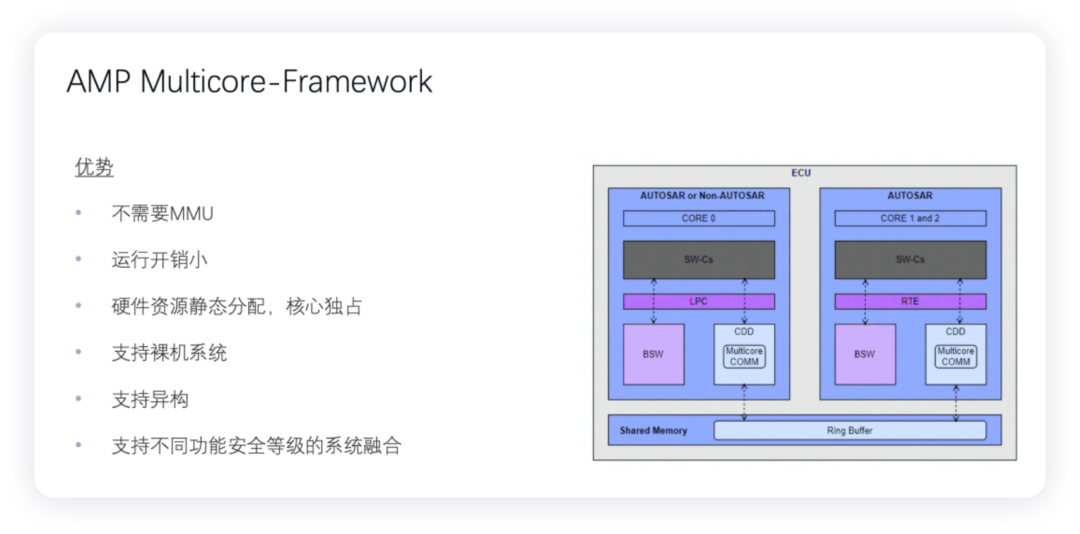
NIO uses the AMP multi-core architecture in the area controller, and the AMP mode RTOS runs an operating system on each CPU.
- Advantages: No need for MMU, small runtime overhead, support for bare metal systems, static allocation of hardware resources, support for the fusion of heterogeneous and systems of different functional safety levels.
- Challenges: load balancing of multi-core tasks, stable multi-core communication mechanism, synchronization and security issues caused by start-up order, and more complex functional safety considerations.
This architecture also requires a product cycle for iteration and testing, and we can also compare the completion of G9’s software and architecture by XPENG.
Summary: 2023 is a key time for new energy vehicle companies and traditional automakers to introduce new EEA architectures and SOA. Whether advanced architecture can be supported by mature software is the biggest challenge at present.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.