Hi everyone, Da Baozi Li is here again.
Do you still remember when XPeng released the video about high-speed NGP almost three years ago, Da Baozi Li wrote an analysis about the NGP promotional video and it became a hot post of the month in XPeng community. A week ago, XPeng officially released the experience video of urban NGP. As a fan of intelligent assisted driving, of course, we cannot miss this. Let’s take a look at Da Baozi Li’s analysis.
Comprehensive Introduction of Urban NGP
Currently, XPeng’s urban NGP function is implemented on the P5 model, and the P5 model has made progress in adding two more LiDARs and a city-level advanced assisted driving map compared to the P7 model. Of course, at the visual algorithm level, P5 is implementing more optimized algorithms on the visual level and better fusion with high-precision maps. This can be seen in hardware. Actually, the front camera of P5 and the subsequently delivered P7 no longer use Bosch’s monocular vision device for redundancy. Although Blood’s teacher proposed a new understanding and viewpoint of the monocular camera of P7, there is evidence both in the P7 press conference and some later personal understanding that the monocular camera is a Bosch kit for safety redundancy, and of course, the kit also serves AEB because XPeng at that time had not yet developed the AEB based on visual basis.
Therefore, in the video, Wu Xinzhou proudly announced that XPeng is the only enterprise in the world that achieves city-level assisted navigation in the price range of about 200,000 yuan, and P5 is the only product so far that realizes city-level assisted driving ability in the price range of about 200,000 yuan. So, when P5 was launched, I always highly recommended choosing the XP3.5 version, after all, P5 is almost the only opportunity to use urban-assisted driving in this price range.
What abilities does City NGP realize?
Without further ado, let’s analyze what scene capabilities are realized by urban NGP.
Point-to-point assisted driving capability for city road segments
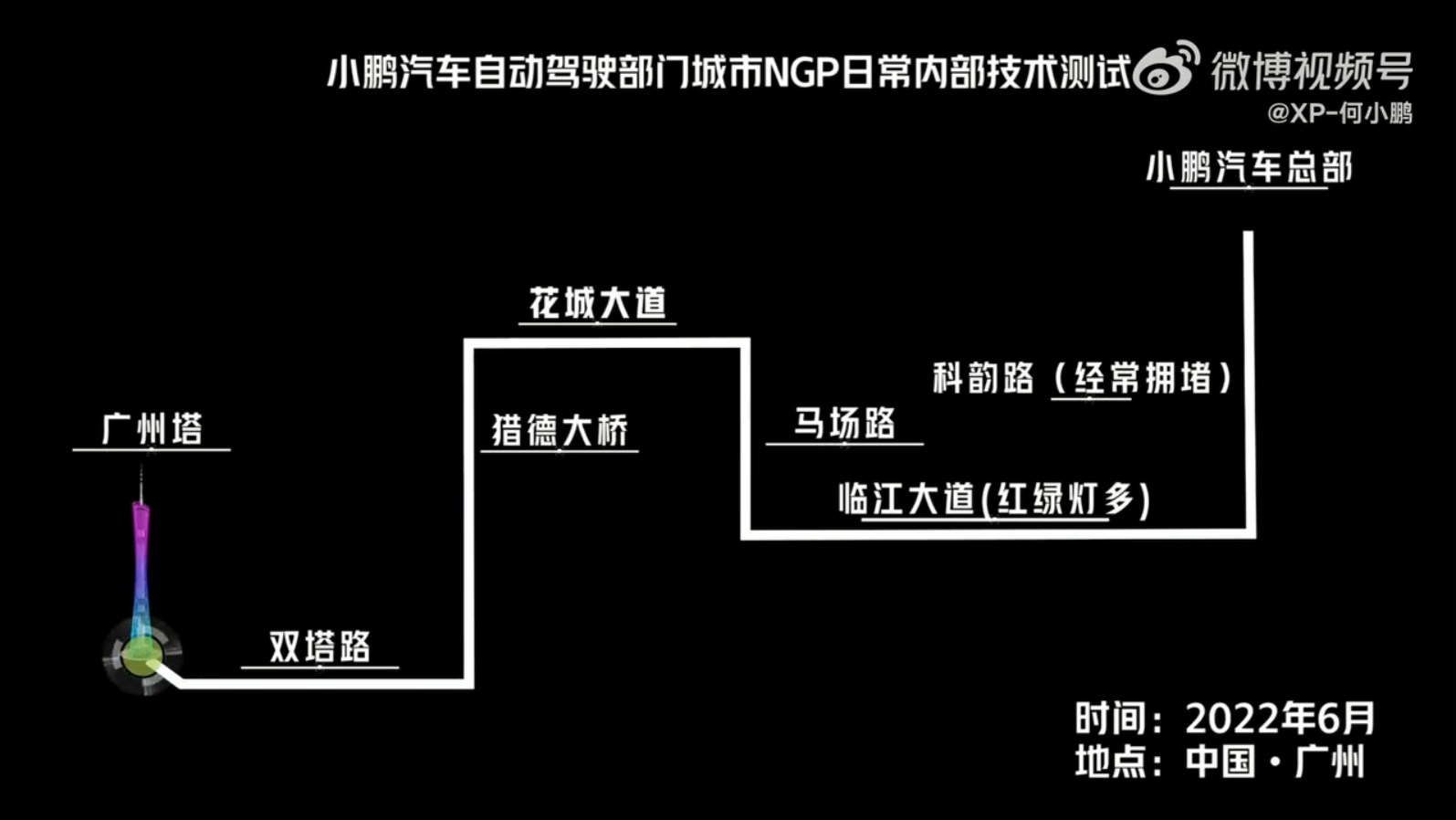
In the video, we can see that P5 planned a road from XPeng Car Headquarters to Canton Tower. In this plan, P5 achieved full-assisted driving from “nearby roads of XPeng Car Headquarters” to “nearby roads of Canton Tower”. During the assisted driving process, the driver can monitor the vehicle and the vehicle can automatically respond to navigation and road conditions, such as driving, changing lanes, traffic light recognition, turning corners, turning around, etc.
However, it is worth emphasizing that City NGP is different from the “Full-Scene Auxiliary Driving Capability” showcased on 1024 last year. City NGP actually refers to the ability to activate NGP on urban road sections, which requires all points on the map to be located on urban road sections. For example, in this test drive, City NGP could not be activated from the underground parking lot like in the previous full-scene experience or within the Xpeng campus, but only on urban roads. Personally, I understand that the full-scene auxiliary driving capability can only be achieved on G9 models, and cannot be realized on P5 due to its inability to integrate and connect with full-scene driving.
U-Turn Capability
Turning around in a 180-degree lane is a key test for the urban auxiliary driving capabilities, where the vehicle needs to make a turn at the intersection with the opposite heading on the current road. There are mainly two challenges:
- Perception and processing ability of the surrounding situation in complex intersection situations.
- The vehicle’s maximum turning ability when making large-curve turns.

The U-turn scenario demonstrated by Xpeng is a relatively rare intersection, where the U-turn is made at a gap in the middle of the road. I have driven through such an intersection in Guangzhou, and the distance for the vehicle to go through is indeed very limited. I remember that I had to switch to R gear once for a change in direction to pass through. Looking at the P5, it accurately perceives the presence of non-motorized vehicles at the intersection and brakes in time to let non-motorized vehicles leave before continuing through the curve. In this scenario, the P5 actually utilizes multiple capabilities, such as perception of non-motorized vehicles (braking), using high-precision gradient prediction to slow down before approaching the intersection, and perception of the cement wall after turning (slightly press the brake to reduce the tension when the car is very close to the guardrail), which enables the vehicle to smoothly pass through the intersection.
 However, there are also challenges in the experience of this intersection. For example, when P5 detected a blue delivery electric bike in front of the right, it applied the brake (stopped), however, the electric bike still had a certain distance from P5 at that time. In this case, a human driver would generally continue driving since the electric bike clearly didn’t pose a threat to our vehicle, but P5 was unable to make such a judgement. Similarly, when passing through by making a U-turn and the vehicle is too large to make it in one go, can the City NGP continue driving by adjusting its position via reverse parking? This remains uncertain.
However, there are also challenges in the experience of this intersection. For example, when P5 detected a blue delivery electric bike in front of the right, it applied the brake (stopped), however, the electric bike still had a certain distance from P5 at that time. In this case, a human driver would generally continue driving since the electric bike clearly didn’t pose a threat to our vehicle, but P5 was unable to make such a judgement. Similarly, when passing through by making a U-turn and the vehicle is too large to make it in one go, can the City NGP continue driving by adjusting its position via reverse parking? This remains uncertain.
Recognition of Traffic Lights and Start-Stop
The biggest difference between urban roads and elevated roads is the traffic lights. In urban roads, we will encounter countless traffic lights. In this case, P5 can accurately obtain the signal of the traffic lights and automatically start or stop the vehicle through visual ability (not through V2X communication). In the image below, the big screen in the middle of P5 accurately displays the green light while there is still a certain distance to the intersection.

The main challenge in this scene is the inaccurate recognition of traffic lights. Currently, the styles of traffic lights in China are completely different. For example, on the roads in Tianjin, you will see such a unique-shaped traffic light. In this case, it is uncertain whether P5 can recognize and respond to it. In addition, how to deal with flashing yellow lights may also be another challenging scenario.

Ability to Make Detours
Driving on urban roads, especially under current circumstances, detours are inevitable. For example, when the adjacent lane has a car cutting in, our vehicle chooses to slightly detour within the lane to prevent the cutting in. Or when there is a lane driving over the lane marking, we quickly pass through by making a detour. Or when a vehicle in front stops to pick up passengers, our vehicle detours around the stopped car.
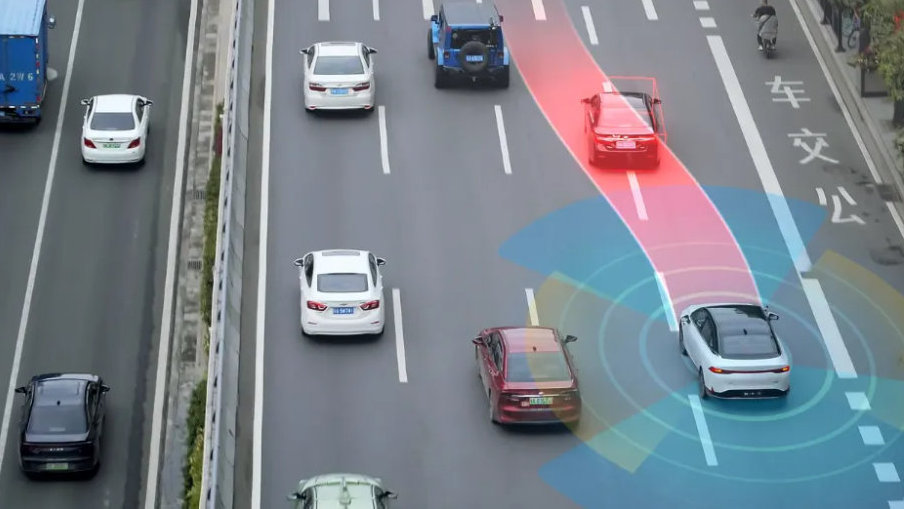
 In the video, P5 demonstrated a certain degree of bypass capacity, especially when dealing with situations where cars from the right try to cut in. P5 does not always yield, but rather starts to bypass when it senses the right vehicle attempting to cut in, as shown in the figure below. This is actually a game, and if the other vehicle accelerates to cut in, P5 will slow down or stop to avoid a collision. On the other hand, if the other vehicle stops cutting in, P5 will successfully bypass. This function to a certain extent reflects the “anti-cutting in” capability. With this bypass capacity, the continuity of vehicle driving can be increased and the efficiency of urban assisted driving can be improved, avoiding being affected by many other factors.
In the video, P5 demonstrated a certain degree of bypass capacity, especially when dealing with situations where cars from the right try to cut in. P5 does not always yield, but rather starts to bypass when it senses the right vehicle attempting to cut in, as shown in the figure below. This is actually a game, and if the other vehicle accelerates to cut in, P5 will slow down or stop to avoid a collision. On the other hand, if the other vehicle stops cutting in, P5 will successfully bypass. This function to a certain extent reflects the “anti-cutting in” capability. With this bypass capacity, the continuity of vehicle driving can be increased and the efficiency of urban assisted driving can be improved, avoiding being affected by many other factors.

However, P5’s prediction and game theory are not always accurate. For example, in the image below, it is evident that P5 is now passing through this ramp, with the system choosing the right lane for driving. Frankly, I did not understand this logic, as there are clear obstacles and warning posts on the right side, and the car on the left has not shown any signs of encroachment. Driving close to the right side line in this situation will undoubtedly bring great pressure to the driver.

Of course, Wu Xinzhou also disclosed the boundary of the current version of the Urban NGP in the program, such as not crossing the solid line for bypass, and bypassing completely stationary vehicles. However, it is difficult to continuously bypass the scenario where the car is ambiguously moving when parking or dropping off passengers.
Left Turn Without Protection
This scene is actually a turning ability test in a city scenario. The highlight of this operating condition is that P5 does not rely on lane lines to make turns. P5 provides multiple verifications through lane lines, the motion trajectories of surrounding vehicles, and high-precision map positioning. For example, in the left-turn process in the video, due to the gradual approach of the side vehicle, P5 deviates to the right in a dotted line situation, ensuring both driving safety and turning efficiency.

Feasible Space Concept of LiDAR
Wu Xinzhou introduced the difference between LiDAR and visual perception in the video. Simply put, visual algorithms must recognize what they see before making corresponding judgments. Although LiDAR may not be able to recognize what it is, at least it knows that this is an object. Based on this, a concept of “feasible space” is formed.
 “`Markdown
“`Markdown
In the case that a large toy bear fell from a truck far ahead and was half-squatting on the road, the visual camera would capture this object. However, since the algorithm model we have does not include the “half-squatting toy bear” model, our vision will consider this thing as non-existent, an unrecognizable object. (Someone will definitely ask here, why should it be considered non-existent, why can’t we consider unknown things as existing? That’s not feasible because there are too many things in the visual camera. If everything is considered to exist, the car can hardly move forward.)
But the LiDAR is different. The active light source emits and the returned point cloud data reconstructs the 3D structure of the object. Even if the LiDAR is not told that this 3D structure is a half-squatting bear, the LiDAR at least understands that “there is a big guy on the road ahead” and may need to slow down. From another perspective, the LiDAR can also form a “drivable space” where there are no obstacles in the space. With this concept, vehicle driving ability on city roads can be enhanced.

However, this drivable space is not all-powerful. For example, in the scene depicted in the figure above, the front of the bus occupies a slightly larger space, but P5 still believes that there is no drivable space for the vehicle to pass through. The vehicle did not make a detour or lateral movement in this situation. This is actually a scenario with a subpar experience because in real life, this scenario would definitely be compressed by the following car. Clearly it is possible to pass through, why aren’t you moving, are you intentionally blocking me?
A more detailed simulation-assisted driving display system
After carefully examining the simulated driving display on the center screen, there are still many differences. With the city NGP and LiDAR enhancement turned on, the scope of vehicle recognition is broader. For example, in the image below, the broad perception of surrounding vehicles is clearly visible, with the foremost vehicle even being at least four cars away from the front car under the red light.

In terms of recognition of lateral flowing vehicles, under the condition of intersection, big public transport vehicles can be clearly seen on the assisted driving simulation interface. We believe that the ability of the P5 in lateral perception has improved.

“`Translate to English- Markdown:
Simulating the real direction of the vehicle, there is no accurate differentiation for the direction of the vehicle (such as, which direction the car is facing) on the original P7 simulation system, it can only tell you that there is a car here. However, there has been great progress in the P5 simulation. For example, even the opposite turning vehicle can be accurately identified and displayed as shown in the figure below.

Refactored Dashboard Simulation

After turning on the NGP in the city, immersive auxiliary driving simulation graphics are provided in the dashboard, in a card mode simulation placed around other displays, this must be acknowledged as excellent, the original P7 dashboard simulation was actually too simple, but this time an immersive simulation of an auxiliary driving dashboard is probably the strongest among the cars currently in production.
More User-Friendly Voice Prompts
In the demonstration video, Little P actually interacts with the user throughout, such as prompt for sudden braking, “Sorry, the brake was a bit sudden,” “The green light is in front, go straight ahead,” etc. It makes you feel like there’s a driver or navigator interacting with you. Tips, such as “We’re going to change lanes,” give users better psychological preparation in advance.
City NGP seems to have some room for improvement
After all, it’s still an engineering version. From the video, I personally feel that City NGP may still have some room for improvement (caodian). In addition to the content mentioned in the video, the following aspects are also worth looking at:
The distance from the preceding vehicle is too far
This is an old problem for XPeng Motors in order to ensure safety and smoothness of assisted driving deceleration, G3, P7, and P5 all have this problem. The distance from the preceding vehicle is too far, as can be observed that the actual distance between the car and the preceding vehicle in the figure below is approximately more than two car lengths, in this situation, it’s actually very easy to be cut in during city congestion.

The problem is that due to the existence of gaps, the vehicles around it will inevitably want to insert into this gap, but P5’s own bypassing cannot generate enough space and anti-cutting ability, which will cause continuous vehicles to insert themselves, and from the following images, it is clear that in a short period of time, three to four cars have cut in continuously, and the following car has already subconsciously acknowledged this.

Dependency on High-Precision Maps Still Exists
In the last scene of the video, when a taxi illegally parked before the lower ramp, P5 did not execute the bypass strategy but kept waiting behind. The reason for this situation was attributed to the fact that the taxi was slightly moving and did not reach the scene of “absolute stillness”, so P5 would not bypass.

Here, I have my own conjecture that this scene is very similar to the one where NGP is about to exit from the expressway. According to the guidance of high-precision maps, the vehicle will enter the rightmost lane in advance (for example, 2 kilometers in advance). Once it enters this lane, the vehicle will automatically stop any operation of changing lanes or overtaking, and follow the front vehicle until it enters the ramp. I guess the logic here is “I am about to enter the ramp. Changing lanes towards the inside may cause the ramp entry to fail. To ensure that I can enter the ramp, I can tolerate slow speed.”
In my personal understanding, in this scenario, the weight of high-precision maps is still greater, because vision is judged to obey the logic of high-precision maps. Otherwise, in the picture above, the conditions and logic for bypassing are fully met. At least, this is a standard scenario for bypassing slow-moving vehicles, right? Therefore, due to the dependence on high-precision maps, City NGP may have the same situation as Expressway NGP, that is, the incomplete usage scenario caused by missing maps. For example, many roads cannot be used by City NGP because the latest urban assisted driving maps have not been collected.
Suppression of Large Vehicle Perception
This content is very simple, and is also expressed very vividly in the video. When a large vehicle is perceived in the surroundings, P5’s safety strategy is very reliable, and it can even be said to be conservative. The experience of stopping at every opportunity will not only give users on board a relatively bad experience, but also potentially cause uncontrollable situations for the following cars. In this picture below, because of the large vehicle on the right, P5 took the braking process, which caused the following van to seem to brake too late and the distance between it and P5 was quite close.

This sudden braking, as mentioned in the video, has a relatively large impact on user experience. Although safety has been emphasized, in fact, some optimization may still need to be done in terms of user experience and functional perception in certain scenarios.### Unable to preview ADAS simulation screen and map screen simultaneously
During the ADAS driving process, Wu Xinzhou kept switching between the normal navigation map screen and the ADAS simulation screen from the copilot position. The reason is simple: the content of the ADAS simulation screen is limited to the present environment and cannot provide information such as traffic jams. On the other hand, viewing the normal navigation map will not allow for understanding the surroundings and vehicle planning of the ADAS system. Therefore, Wu Xinzhou was continuously switching between the two maps in the video.

In fact, if the two screens can be displayed simultaneously, it will significantly improve the user experience and efficiency, and avoid the inconvenience of frequent switching.
It is worth noting that there is still some delay in the ADAS simulation. For example, in the detection of lateral vehicles below, the lateral vehicle had already appeared at the position of our vehicle’s head after passing. But on the simulation screen, it had just started to touch our vehicle’s head.

Discussion on other features of City NGP
XPeng Motors has yet to widely deliver City NGP to users. Delaying the originally scheduled release in the first half of the year is understandable, considering factors such as the pandemic. However, the recent frequent actions suggest that the first delivery day might not be too far away.
City NGP will be subject to restrictions on urban high-precision maps coverage and approval. It is estimated that there will be some limitations in the beginning stage, but once a few cities’ approvals are granted, it will be helpful for future ones.
XPeng Motors’ most challenging task is to be a pioneer in an unexplored field. In this situation, various approvals and development will be more difficult. For example, how to conduct approvals is unfamiliar to the regulatory department, which may cause difficulties. Those who often deal with such matters will understand that the first-time approval is usually the most challenging, and it will become much simpler later.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.