
Intelligent Driving Development Route and a Focus on Parking Scenarios
Author: Turbocharged Little Fatty
What are the major auto manufacturers doing about intelligent driving? What is their route to success? I think the main points include:
- Installation of L4 level autonomous driving hardware, mainly with high-performance computing platforms and LIDAR;
- Consolidation of L2 level assisted driving (including the so-called L2+, L2.5, L2.X, etc.);
- Refinement of assisted driving scenarios (including parking, high-speed navigation, city navigation, etc.).
Of course, depending on different brand positioning and product positioning, everyone’s efforts and achievements in intelligent driving are different. Nowadays, users’ demand for intelligent driving systems is constantly increasing, and more and more users are beginning to use and frequently use intelligent driving functions, which has also enabled more users to experience the convenience of intelligent driving.
Today we are going to talk about one aspect of assisted driving scenarios: parking.

A few days ago, WM Motor released the PAVP function for public parking and unmanned learning-assisted parking. What kind of function is this? What are the conveniences? Who will use it? Let me share my views with you.
What is PAVP?
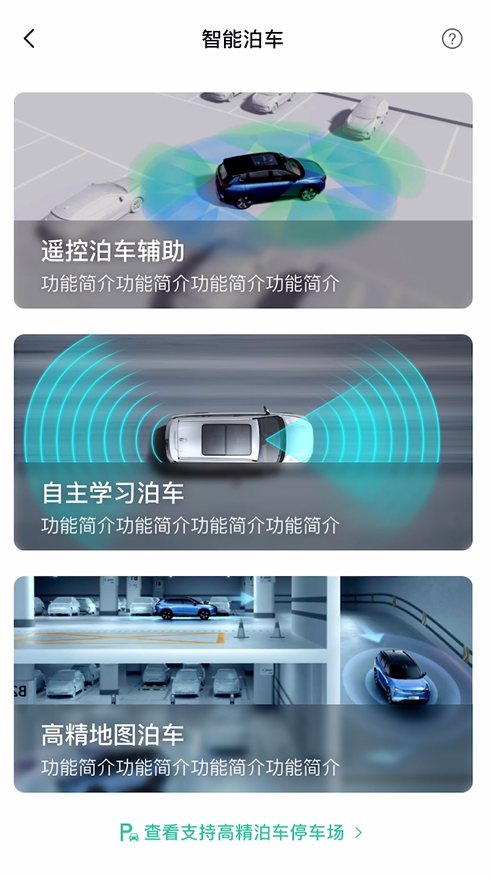
When it comes to parking scenarios, most users will think of the APA automatic parking assist. After all, this is the most widely used parking function with the highest installation rate.
In addition to this, some models are equipped with RPA remote parking assist, which can control the vehicle to go straight, in and out the parking space within a certain distance through the phone or key. The main purpose is to assist users who have difficulty getting in and out of narrow parking spaces.
For frequent parking spaces, some products have previously been equipped with parking memory parking. The vehicle first needs to learn the parking space and the route out of the parking space, and the system can assist the vehicle to drive along the set memory route in the parking lot.
WM W6 previously had the HAVP fixed parking space unmanned memory valet parking function, which enables users to park in or out of fixed parking spaces through the mobile app without sitting in the car, mainly for company and residential fixed parking spaces.
The “PAVP public parking unmanned learning-assisted valet parking function” we are discussing today is a solution for public parking lots that are far away from parking or have non-fixed parking spaces that cannot be learned in advance.
Let’s take a look at a video first:
<iframe height=498 width=510 src='https://player.youku.com/embed/XNDc5NjAxNjYwNA==' frameborder=0 'allowfullscreen'></iframe>
“`markdown
PAVP, short for Public Automated Valet Parking, was first introduced in the WM W6 car model.

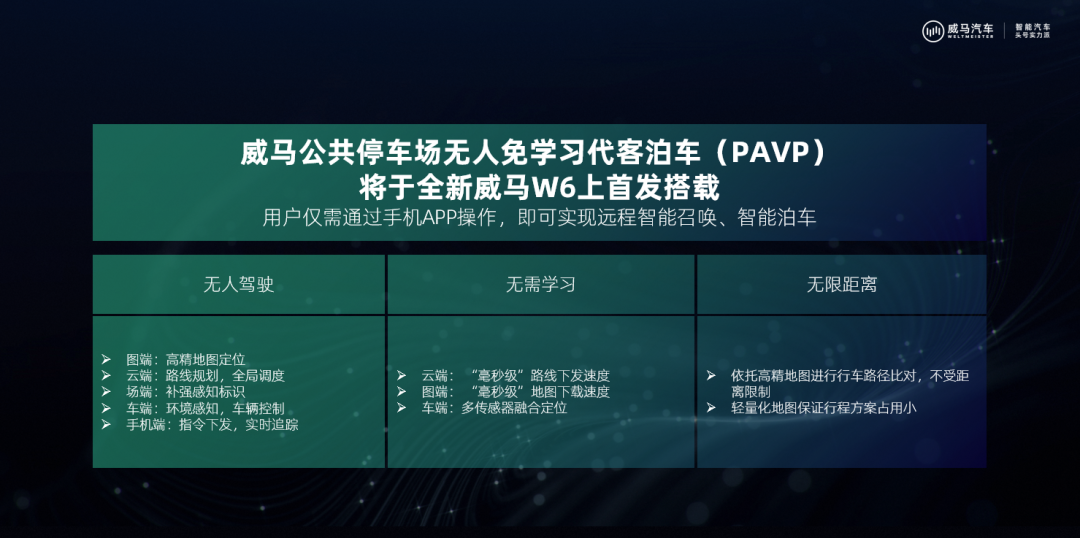
With the “PAVP Public Parking Lot Remote Valet Parking” function, users can remotely and intelligently call for valet parking through the mobile phone APP.
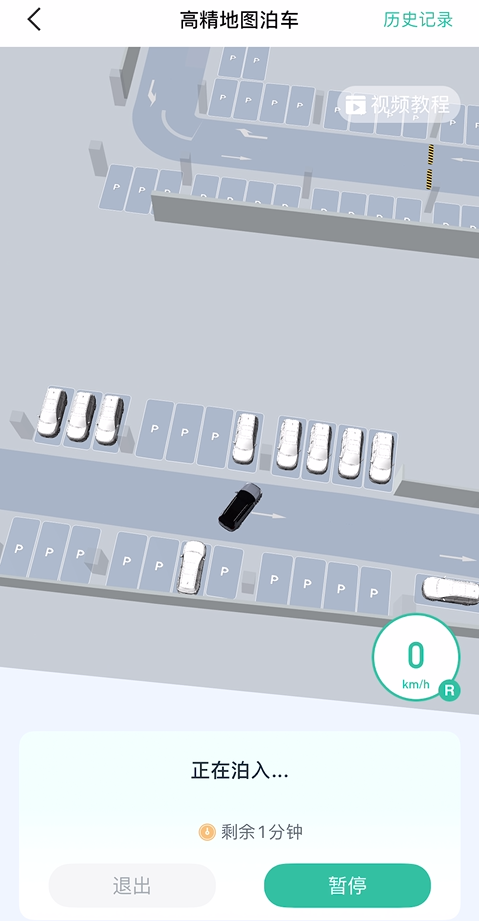
During the parking process, the system will rely on the vehicle’s own sensors, high-precision maps of the parking lot, parking lot location signs, and cloud dispatch to achieve autonomous valet parking. The biggest features include: unmanned driving, no learning required, and unlimited distance.
After the user gets off the car at the designated location, the vehicle can drive to the parking space by itself and park automatically, and lock automatically. Similarly, through the mobile phone APP, the vehicle can also automatically power on and park out of the parking space to pick up the user at the designated location.
To achieve this function, in addition to the vehicle-side hardware, it is also necessary to use high-precision maps at the centimeter level of the parking lot, which is provided by Baidu Cloud in collaboration with WM Cloud to complete map distribution, information delivery, and vehicle dispatch according to the parking space situation.
At the same time, the parking lot also needs to undergo certain modifications to ensure the support of the site, mainly including the modification of the lanes and parking spaces and the addition of some identification signs.
“`
On the hardware side, the WmAuto W6 is equipped with two high-definition front-view cameras, four high-definition panoramic view cameras, twelve ultrasonic radars, and five millimeter-wave radars. It is equipped with WmAuto’s and Baidu’s co-developed automatic driving computing platform.
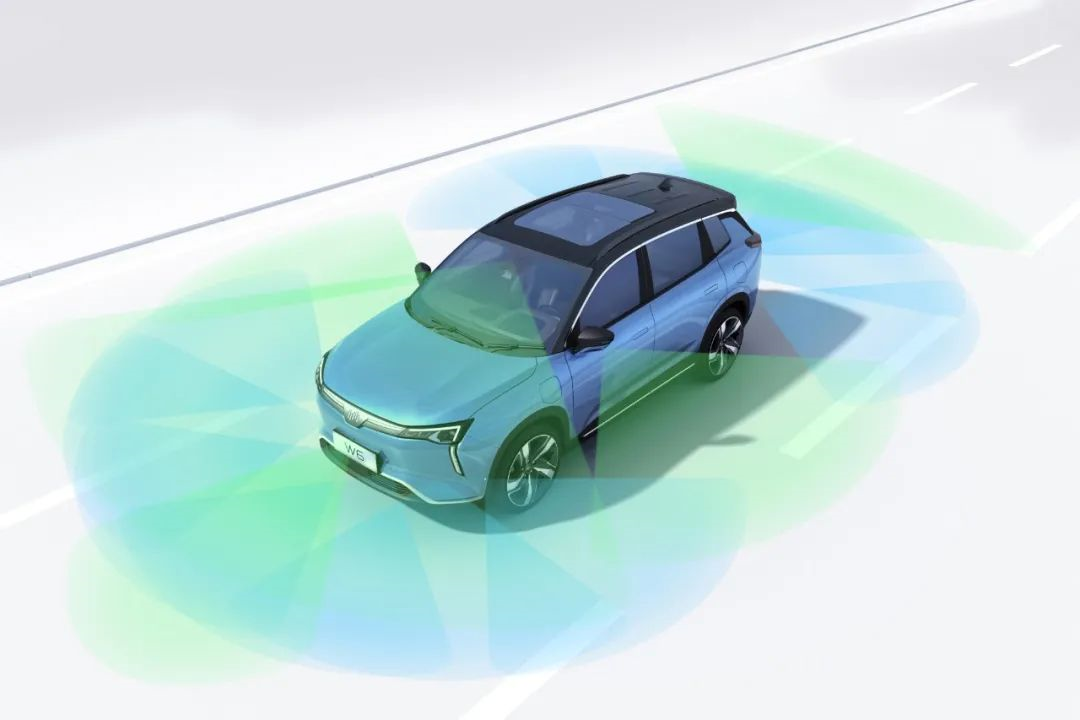
It is precisely based on the synergy of these hardware and software that the PAVP public parking lot can achieve unmanned, learn-free and valet parking. When the vehicle approaches a parking lot that supports parking functions, the vehicle will automatically download path information and complete preparation before use. In order to quickly issue map information, PAVP public parking lot uses lightweight maps, compressing high-precision maps to within 10MB.
Previously, when experiencing the WmAuto W6’s HAVP fixed parking space unmanned memory and valet parking, the vehicle’s maximum distance was 100 meters. PAVP will customize automatic parking routes for each parking lot, eliminating distance limitations.
In addition, WmAuto also brings VIP exclusive benefits:
- Supported by PAVP public parking lot unmanned and learn-free valet parking, free parking and exclusive parking spaces;
- PAVP public parking lot high-precision map and route download is free.
Parking Scene in Smart Driving
After introducing PAVP to everyone, let’s talk about the “parking scene”.

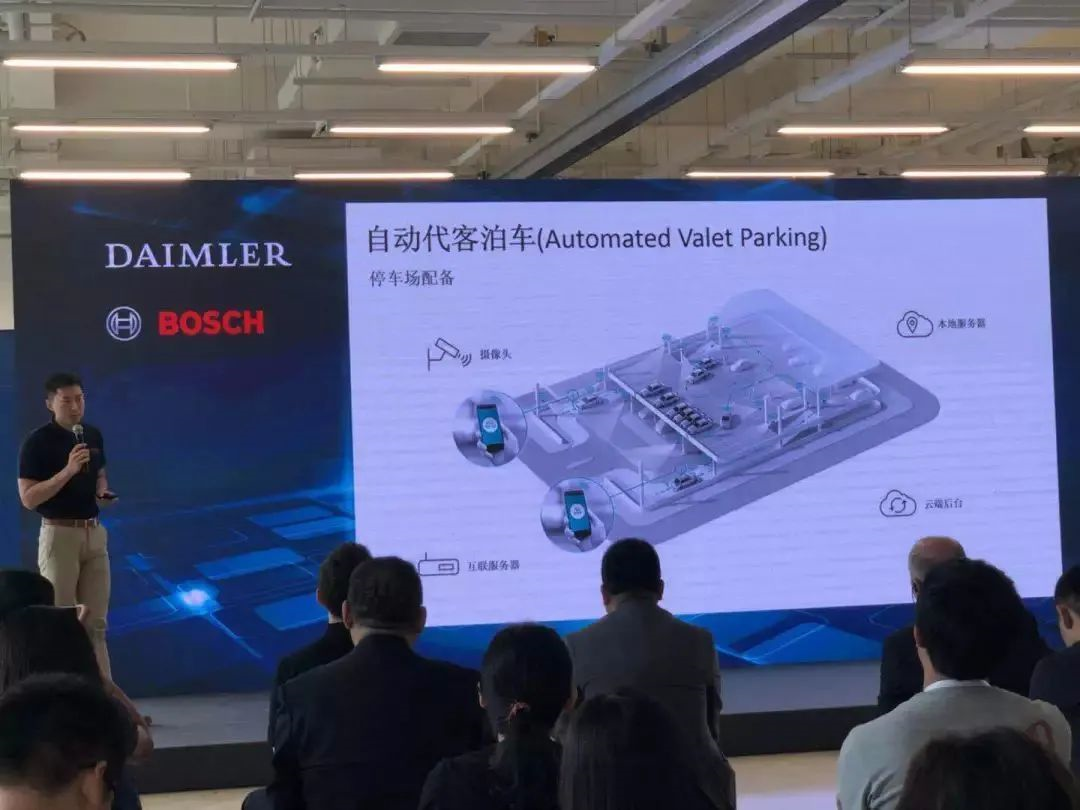
In fact, the working mode of WmAuto’s PAVP is not the first. In 2018, we experienced the “automatic valet parking” technology jointly developed by Bosch and Daimler. The difference is that many “signal towers” were installed in the parking lot at that time to assist the vehicle in obtaining location information.
In other words, just like the guidance map in a shopping mall, the signal tower tells the vehicle “you are here.”
In addition to Bosch and Daimler, when the ARCFOX Extreme Fox Alpha S Huawei HI version was launched some time ago, there was also information about “autonomous parking.” One difference is that the ARCFOX Extreme Fox Alpha S Huawei HI version is equipped with three LIDAR sensors, which have stronger sensing capabilities but also higher hardware costs.
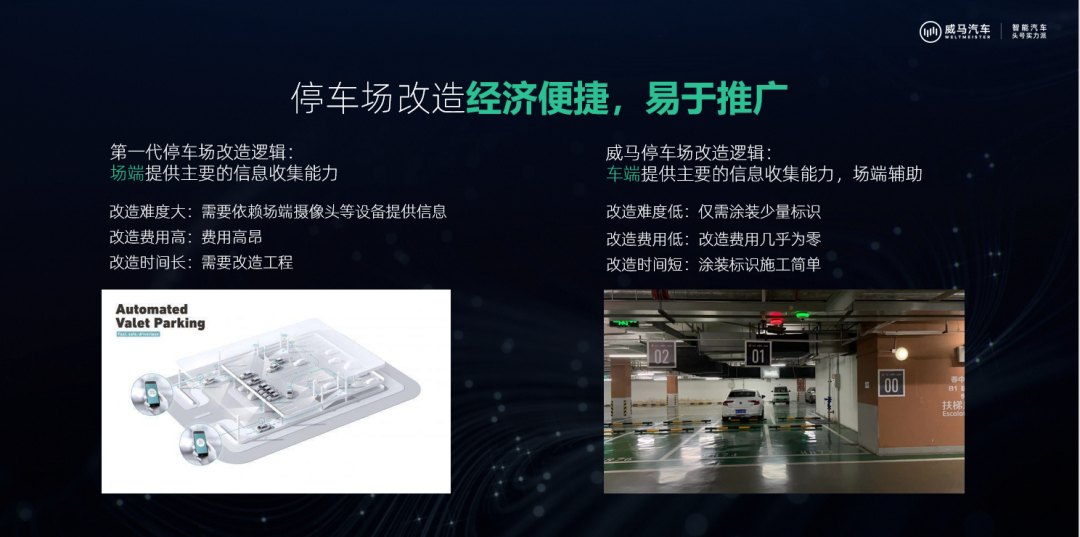 # Three systems compared, ARCFOX Alpha-S Huawei HI version requires no modification to the field end but needs highly precise mapping of the parking lot. WmAuto PAVP and Bosch Daimler Automated Valet Parking require some modification to the field end and WmAuto PAVP’s modification cost is clearly lower.
# Three systems compared, ARCFOX Alpha-S Huawei HI version requires no modification to the field end but needs highly precise mapping of the parking lot. WmAuto PAVP and Bosch Daimler Automated Valet Parking require some modification to the field end and WmAuto PAVP’s modification cost is clearly lower.
Why do some car makers’ “parking scenarios” under research and promotion falls into the “gap of intelligent driving” as I claimed?

Whether it is assisted driving nowadays or autonomous driving in the future, the scenario that most users care about is actually “on the road”, not “in the parking garage”. That’s why, when car makers release information about L4 level autonomous driving, high-speed navigation assistance, or city navigation assistance, the topic will obviously generate more buzz.
On the other hand, intelligent parking scenes seem to be less appealing.
Here are a few possible reasons:
- First, most of the parking assist functions that users have had experience with in the past cannot achieve “separation of human-car”;
- Second, how to give users a sense of trust after having “separation of human-car”;
- Third, how many users will have the opportunity to experience this feature in the future.
First, let’s talk about the separation of human-car. Faced with APA automatic parking assist and RPA remote parking assist, which could not achieve separation of human-car and were designed for novice drivers; many of my friends who had just obtained a driver’s license were struggling with the parking process.

With the parking assist, they became the largest user group. However, for most experienced drivers, the frequency of using the parking assist function is much lower.
So, when the parking scene can achieve separation of human-car, a novel parking experience may make some experienced drivers slowly experience these functions. For example, with myself, I used to just try out the parking system of any test drive car I got my hands on, but I would never use the parking system again after that.
But if it’s a novel experience of separation between human and car, and it’s good, convenient enough, and works reliably, I’ll try to use this feature. When I was experiencing WmAuto HAVP, I encountered a situation where there were no pedestrians or vehicles to interfere with, and the car stopped firmly in the bend.

Therefore, how to improve the parking success rate and gain more users’ trust in this function may be a significant challenge that PAVP needs to face.Regarding how many users will have the opportunity to experience this feature in the future.
The main reason is that first, you need to own a WM W6 or a subsequent WM model equipped with PAVP function.
Secondly, how many parking lots will cooperate with WM in the future, obtain high-precision maps of the parking lots, renovate the parking lots, and cooperate on parking fees will directly affect how many users can experience the PAVP function.
Finally
Nowadays, more and more car companies, autonomous driving companies, and suppliers are vigorously deploying intelligent driving, but everyone’s routes are different. However, in the end, everyone expects to cover the three major scenes of “highway, city, and parking”.

If the current parking assist system is not significant for experienced drivers. However, the vigorous deployment and development of “unmanned autonomous parking” will change our understanding of parking scenes.
WM PAVP is just the beginning.
Facing intelligent driving, as more and more car companies research and develop, improve products, support sites, and gain user acceptance, new “highway + city + parking” scenes will not only change our travel methods but also change our lifestyles.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.