
Author: Zhu Yulong
I attended the product communication meeting of Liangdao Intelligence and learned a lot about their new products. In the highly competitive market of the LiDAR industry, Liangdao proposes an interesting approach where the characteristics of LiDAR are used to compensate for the limitations of existing perception systems, enhancing the perception capability of City Pilot on urban roads. This version of the LiDAR system focuses mainly on low and unusual objects in urban environments, which can address many unique problems. Traditional vehicle manufacturers have focused on developing different groupings of autonomous driving assistance features. Until the breakthrough of L3 functionality, using more cost-effective LiDAR products to improve the safety and experience of multiple autonomous driving assistance functions may be the best way for LiDAR to gain popularity in the market.
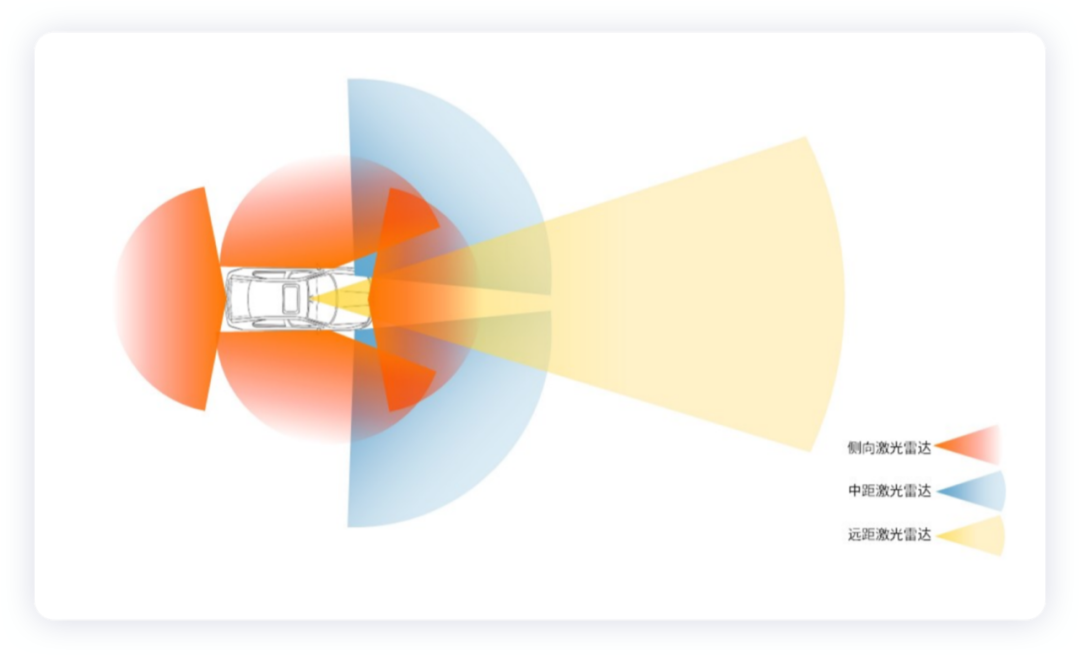
If we refer to the arrangement of millimeter wave radars, LiDAR is most useful in lane-changing and parking scenarios from the rear and sides.

Recognition of low objects
During the L3 development phase, new players primarily focused on solving perception vulnerabilities through the current LiDAR configuration.
The mainstream opinion is to install LiDAR in the front center on the roof of the vehicle, such as Ideal L9 and NIO ET7. It functions as a front collision warning system, automatic emergency braking, adaptive cruise control, and target detection sensors for advanced autonomous driving. When installed in the roof, the position of the field-of-view (FOV) under the edge of the roof cover is considered, and the angle of inclination adapts to different models. The higher the mounting position, the better the field-of-view of LiDAR (able to detect vehicles further ahead by passing over the vehicle in front), and the roof position is less likely to be splashed by sand and gravel during driving and less susceptible to collision danger. Considering advantages such as hardware cost, anti-pollution, and collision repair costs, LiDAR is often used in conjunction with cameras.

In urban roads, various vehicles such as pedestrians, bicycles, and cars changing lanes flow in the same lane, and the driving scenarios are complex and variable, posing a high challenge to intelligent driving in urban areas. When installing forward long-range LiDAR on the roof of a vehicle, the coverage area is mainly considered. However, during detection, if urban road conditions are to be considered, there is a large near-field blind spot, particularly when detecting special objects in China. For example, pets such as cats and dogs with a height of 30-50 cm on the roadway may run into your blind spot when you park or make a right turn, which is particularly inconvenient.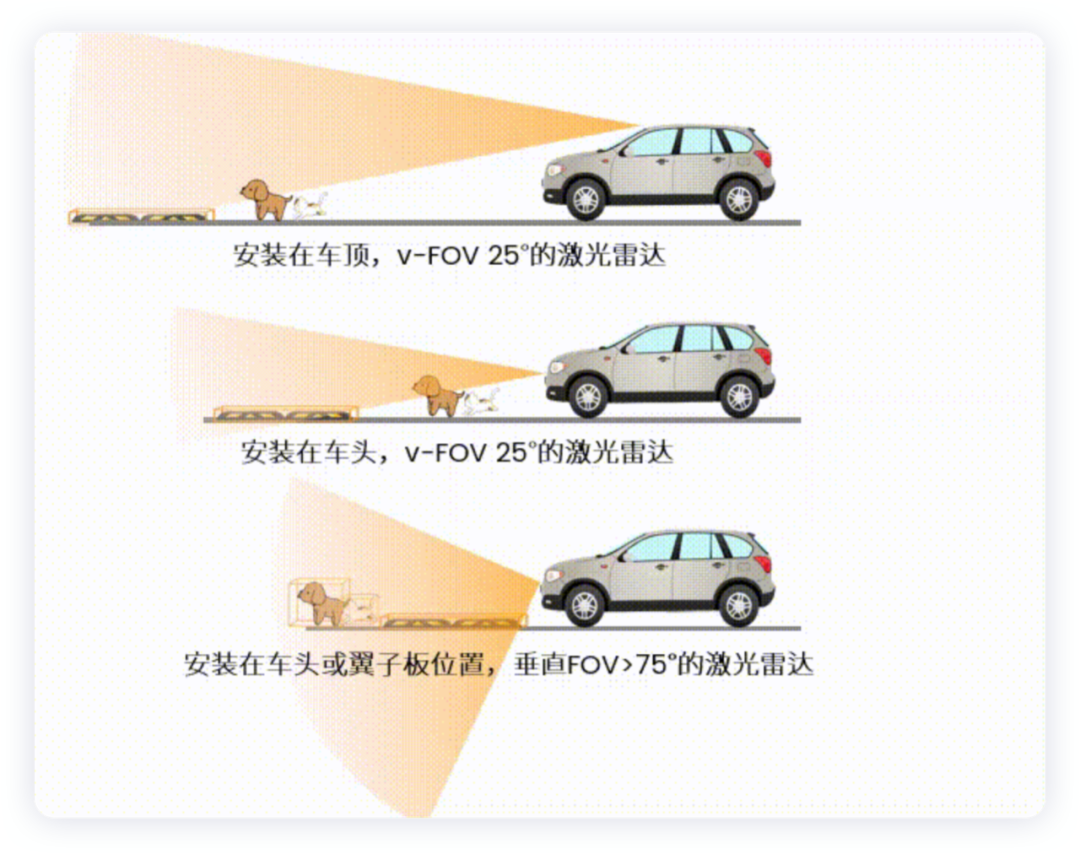
Therefore, with the help of the side-mounted LiDAR with a vertical field of view (FOV) not less than 75 degrees, it can complement the near-field blind spots of the forward-mounted LiDAR, which enables the detection of low objects such as road edges and speed bumps, as well as adjacent lane markings. Typically, road edges have a height of 10 cm, and the near-field detection range can range from 0.35 m to 15 m, achieving ultra-high resolution detection with 30 lines of point clouds at 0.35 m distance.
Higher requirements are proposed for the vertical FOV of the side-mounted LiDAR that complements the blind spots. Judging from current LiDAR installation schemes, the vertical FOV of the side-mounted LiDAR is still at 25 degrees. However, this differentiated product focuses on a vertical FOV of more than 75 degrees.
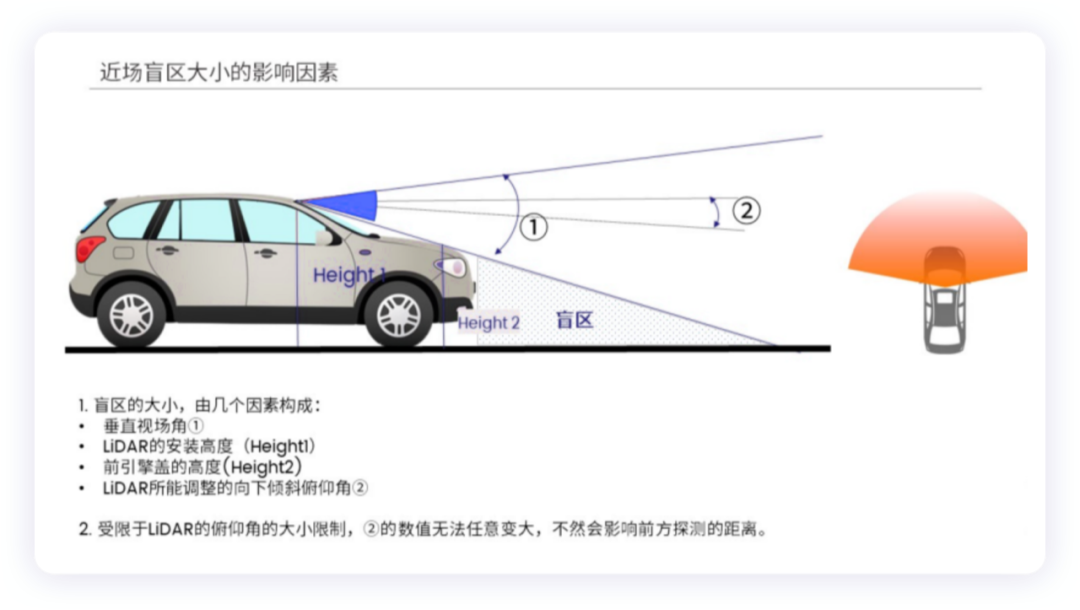
The size of the perception blind spot is determined by several factors, including the LiDAR installation height (Height1), the height of the front hood (Height2), and the downward tilt angle② that the LiDAR can adjust. Due to the size limitations of the LiDAR’s tilt angle, the value of ② cannot be made arbitrarily large, otherwise, it will affect the detection distance in front.
Configuration with Multiple LiDARs
As mentioned above, if one LiDAR cannot satisfy the perception blind spot requirements of City Pilot, the only solution is to spend more money and choose a combination of multiple LiDARs. Currently, one of the solutions for using multiple LiDARs is to place three LiDARs on the front left, middle, and right side of the vehicle’s front bumper and front grille, which is used for forward collision warning, automatic emergency braking, and adaptive cruise control functions. The combination of the three LiDARs will increase the horizontal FOV and effectively detect the blind spot of the crossroad that a head-mounted single LiDAR cannot cover. Configuring the LiDARs at the front of the vehicle will be easier for exterior design and heat dissipation. However, due to their low position, they are vulnerable to being splashed or contaminated by sand, water, etc., and even the risk of damage. Once a collision or damage occurs, the replacement cost will be high (the more LiDARs, the higher the hardware cost).
 The installation of LiDAR for XPeng P5 is on both sides in the front, installed on the left and right front bumpers respectively. It’s necessary to pay attention to the angle arrangement of the two LiDARs on both sides to solve the problems of blind spots at close range and AEB operation at crossroads. The installation position of the LiDAR needs to consider the following aspects:
The installation of LiDAR for XPeng P5 is on both sides in the front, installed on the left and right front bumpers respectively. It’s necessary to pay attention to the angle arrangement of the two LiDARs on both sides to solve the problems of blind spots at close range and AEB operation at crossroads. The installation position of the LiDAR needs to consider the following aspects:
-
Appearance: Bull horns are indeed not good-looking.
-
Heat dissipation.
-
Collision protection.
-
Surface contamination protection.
-
Equipment interference.
-
As small a blind spot as possible.
-
Cost.
From our perspective, a good product needs to consider the design of the vehicle ID, the exterior of the vehicle and the definition of functions, as well as the selection of the LiDAR location. The starting point for the design of the LiDAR layout scheme should be the balance between meeting the needs of functional scenarios and the implementation of engineering.
In summary: With the rapid decline in the cost of LiDAR and the rapid increase in usage, the exploration of perception direction sensors will still be determined in the rapid growth.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.