
Author: Xie Ruxin
As we all know, one of the major advantages of electric vehicles over gas vehicles is their fast response time for power. This places higher demands on the electric vehicle’s power control system. Just like how the implementation of 5G speeds up the network, you need a phone that supports 5G to truly enjoy the benefits of progress. Therefore, in order to improve the driving performance of electric vehicles while ensuring safety, BYD has developed the intelligent torque adaptation control system (iTAC).
Currently, iTAC is based on a four-wheel drive system with front and rear dual motors. It achieves real-time control of the motor torque, improving power utilization efficiency and enhancing the handling, safety, and comfort of the vehicle.
For example, when starting uphill with low traction (wet, snowy, sandy), the iTAC system can precisely control the output torque to avoid excessive force that leads to tire slip. Or during rapid acceleration, when the center of gravity shifts backward and the rear axle bears more weight and has greater grip, the system will distribute more torque to the rear wheels, thereby improving acceleration efficiency.
In addition to improving the performance of straight-line driving, iTAC can also improve the vehicle’s cornering performance. When the vehicle has a tendency to understeer, it will appropriately reduce the torque output of the front axle and increase the torque output of the rear axle. When the vehicle has a tendency to oversteer, it will appropriately increase the torque output of the front axle and reduce the torque output of the rear axle, making the vehicle’s cornering more neutral. In this way, efficiency and safety in cornering are improved.
So far, the functions of iTAC seem like an intelligent four-wheel drive system combined with an electronic stability program (ESP), which gas vehicles can also achieve. The real strength of iTAC, however, lies in its ability to identify tire slip through more precise and higher frequency sampling of the motor speed signal, enabling faster control of the front and rear wheel torque.
Generally, vehicles use wheel speed sensors to read the speed of the wheels and calculate the wheel slip rate to determine the degree of tire slip. The smallest scale of the popular wheel speed sensors that detect changes in the wheel rotation angle is 7.5 degrees or 11.25 degrees. Only when the wheel rotates above this angle will the sensor produce a signal and send it to the electronic control system. Therefore, when the wheel rotates one full circle (360 degrees), the wheel speed sensor can generate 32 or 48 signals.By collecting information in this way, it is greatly affected by the speed of the wheels. For example, when starting the vehicle, the wheel speed is very low, and the interval between each signal is long, which makes the electronic control unit unable to identify the trend of wheels slipping sensitively, resulting in a slower response of the stability system intervention control. Usually, it has to wait until the wheels slip before intervention, causing energy loss.
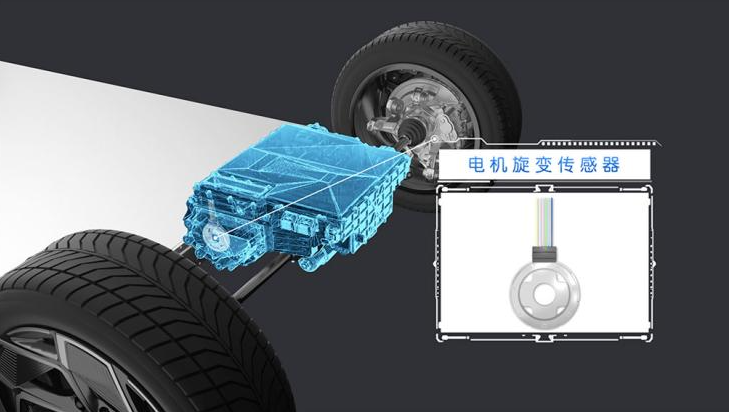
However, iTAC uses the motor rotation sensor to monitor the motor speed and correspond it to the wheel end. It generates 4096 signals every time the wheel turns, which is many more than the few dozen signals generated by the wheel speed sensor. Therefore, iTAC can predict the change of the wheel speed more than 50 milliseconds in advance, and the speed of implementing torque control by the electronic control system is more than 10 times faster than the traditional ESP hydraulic control method to brake the slipping wheel. It can detect the trend of wheel slipping earlier and intervene it before the wheel rotates freely, achieving more efficient anti-skid performance.

This part may be more abstract. Let’s use a more vivid example to help understanding. Imagine that there are two prey, one with excellent hearing and the other with average hearing. When the hunter loads the gun and aims, the one with excellent hearing has already noticed it and runs away quickly. The other may have to wait until the gun sounds to know to run. Compared with the traditional ESP control, iTAC is like the prey with excellent hearing, and takes action before the gun sounds. In addition, traditional ESP mainly improves vehicle stability by reducing torque and braking, while iTAC can also transfer torque, or even output negative torque, with more adjustment methods and adaptability to more scenarios.
From BYD’s snowfield test data, we can preliminarily feel the improvement of vehicle performance by iTAC. Although it is a snowfield test, the principle is the same as when driving on the road.
In the full acceleration test from 0-60km/h, the test car with iTAC is 0.7 seconds faster than the test car without iTAC.
 When starting on ice or asphalt, the test vehicle without iTAC slipped noticeably, while the test vehicle with iTAC was able to start quickly.
When starting on ice or asphalt, the test vehicle without iTAC slipped noticeably, while the test vehicle with iTAC was able to start quickly.
In the cornering test, the test vehicle without iTAC was more likely to lose control, while the vehicle with iTAC was able to draw a smooth curve.

In the circle test, the test vehicle with iTAC was 5-10km/h faster than the one without iTAC.
In addition, iTAC can also achieve an exciting feature. When switched to rear-wheel drive mode and limited to rear wheel slip, it can achieve “smart drifting” (a name I came up with, not an official mode).
In traditional car drifting, the driver needs to precisely control the throttle and continually adjust the throttle depth. Giving too much gas will cause the car to spin out, while giving too little will make it difficult to maintain the drift, requiring high skill level. With iTAC assistance, the driver only needs to step on the accelerator pedal, counter-steer, and after the car slides, iTAC will control the power output, adjust the vehicle’s posture, and maintain the drift. It is a bit like the slip angle control of supercars (such as McLaren), setting a certain amount of slip angle so that no matter how much gas is given, the car will not lose control, and the vehicle will automatically correct its body posture.

Although they are both electric cars, the drifting with iTAC assistance and Tesla’s drifting mode are quite different. The latter still requires precise throttle control by the driver, while BYD is more suitable for novices to enjoy the fun of drifting. From this perspective, BYD’s development of iTAC was intended to allow more drivers to enjoy efficient and fun driving more safely through high-tech. For sure, the addition of various assistive driving features will make driving enjoyment less pure and primitive, but under the tide of electrification technology change, various assistive driving features will gradually replace human operation, and the performance and control boundaries of future vehicles will continue to expand.

Allowing ordinary consumers who are not professional racers to easily touch the threshold of advanced driving is overall a benefit of technological progress. If it is a little less pure, then what’s wrong with it?By now, are you already extremely looking forward to iTAC? It is reported that iTAC will be equipped on the BYD Dolphin high-performance edition, and will be debuted with everyone soon.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.