Author: Zhu Yulong
In the automatic assisted driving system, there are various methods of connecting sensors and control systems. A report on the parking system of Porsche, which I find valuable, is summarized and shared with you.
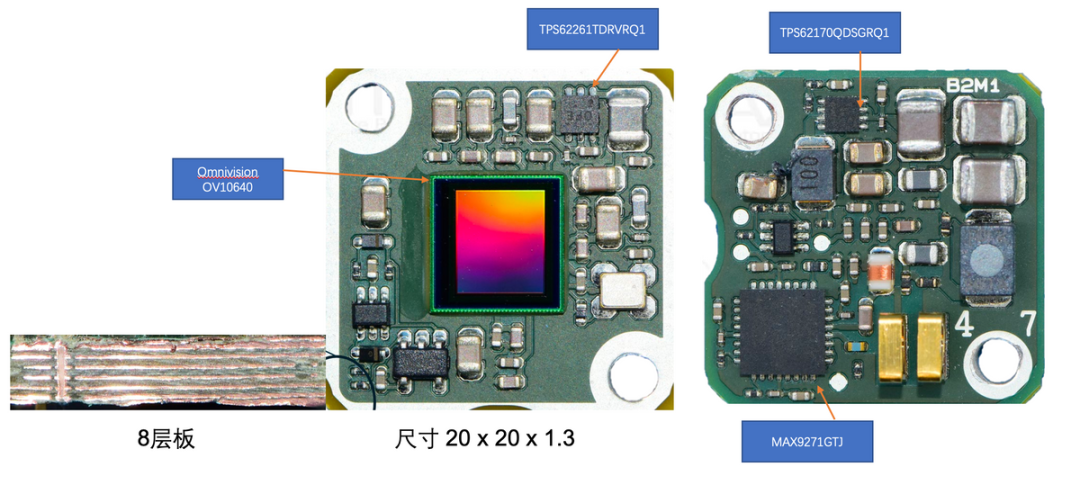
This system is based on the Continental SVC210 surround view camera. The camera comes with a fisheye lens optical module, uses Omnivision CMOS image sensor, 1.3 MP image sensor, and data is transmitted to the ECU (Maxim data serial MAX9271GTJ) through coaxial cables. The centralized image mapping and processing is then carried out by the zFAS controller (Mobileye EyeQ3).
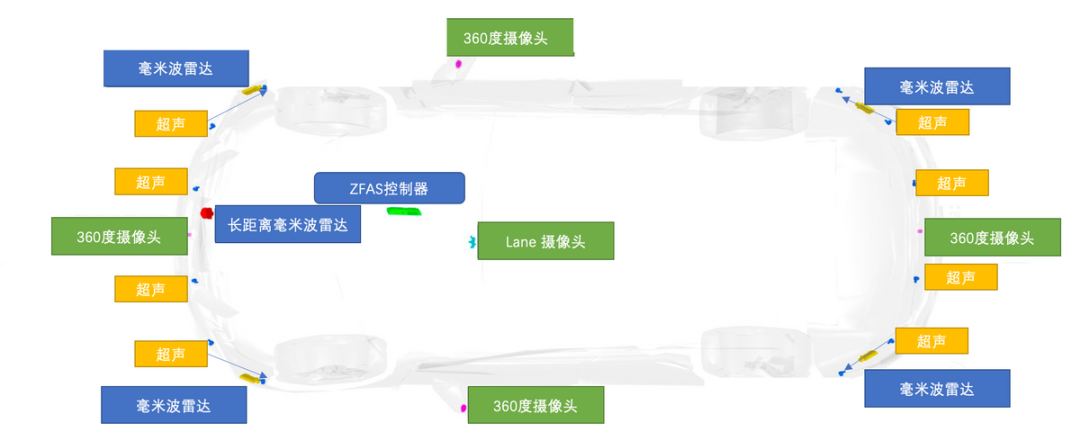
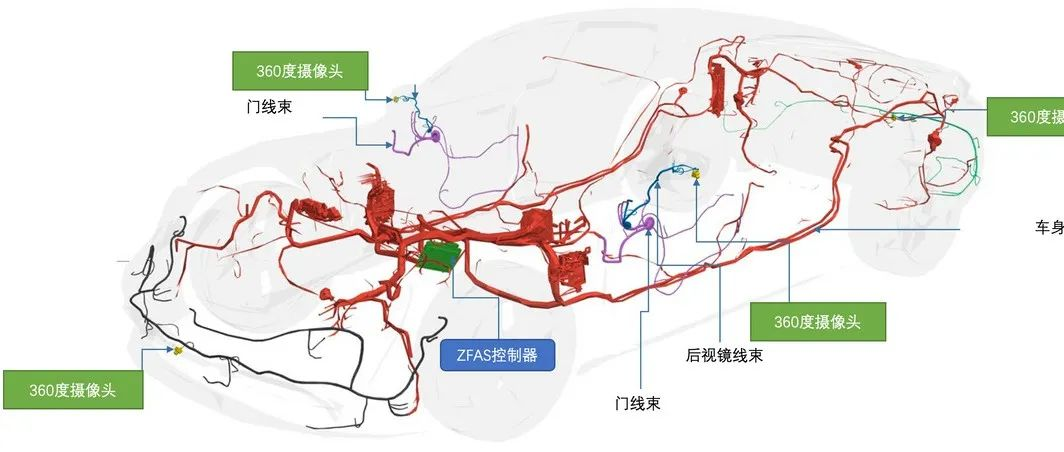
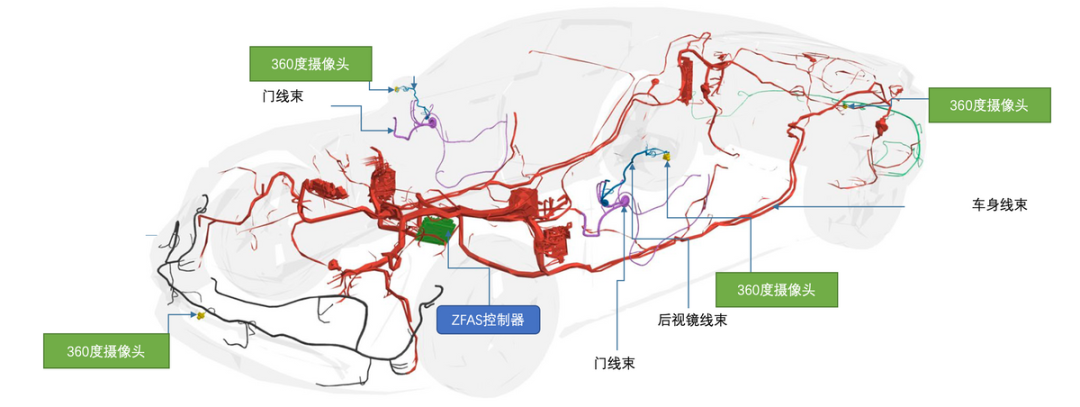
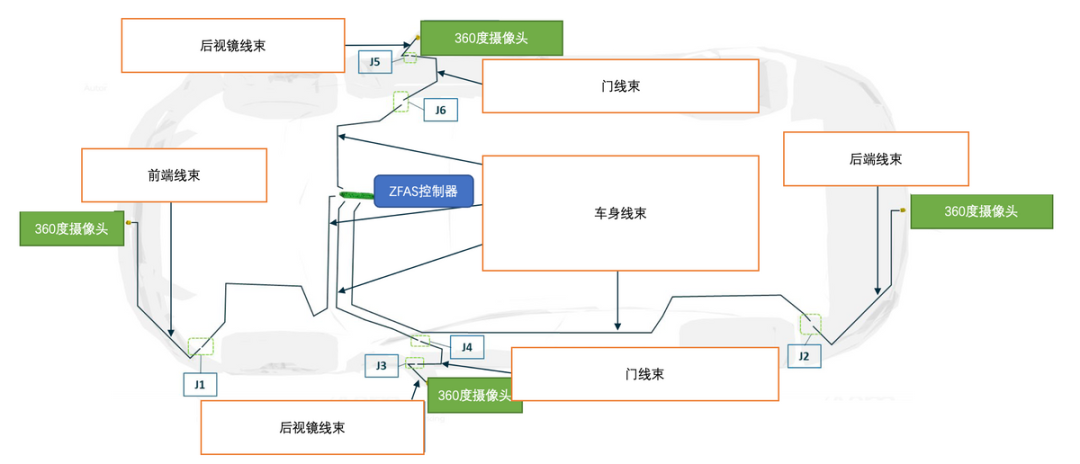
This is an overall layout overview. To centralize the connection of the sensor cables, the 360-degree camera needs to pass through the body harness, door harness, rearview mirror harness, and front parking harness.
Surround view camera
This camera from Continental is used in Audi A6, A7, A8, Q8, e-tron and Porsche Taycan. It weighs 20.6 grams and measures 23 x 23 x 38.2 millimeters. Four of them are used per car, with a resolution of 1.3MP, a refresh rate of 60 frames per second, and no processing circuit inside the camera.

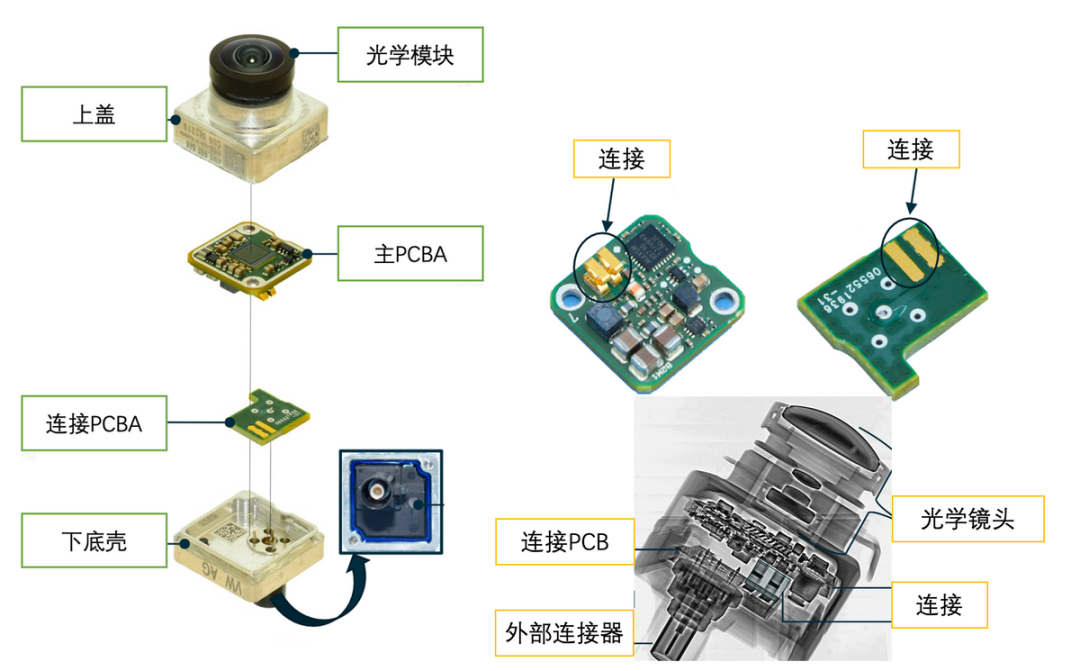
The camera uses Omnivision’s color CMOS 1.3MP pixel (1280×1080) high dynamic range (HDR) high-definition image sensor, connected with MAX9271GTJ, and there are two power chips for the buck circuit in the middle. The entire circuit board uses 8 layers, and the elastic connection is used between the two boards, and then an external connector is used for output.“`markdown
Usually matched with optical lenses to achieve field of view (FOV), the configuration of the vehicle camera also includes other key indicators, such as:
-
Pixels (megaPixels): determine the image resolution. With the support of high-definition screens, the resolution of surround-view cameras is increasing from 1.3MP.
-
Frame rate (fps): the number of frames obtained per second, mainly reflected in the refresh speed of the image during the reverse process.
-
Dynamic range: the ability of the image sensor to capture brightness and dark objects. The larger the dynamic range, the more information about the highlights and shadows will be retained.
Surround-view harness connection
Actually, this is the first time for me to look at the overall connection of the harness. It’s quite complicated. The four cameras contain many harness connections. Currently, the connectors mainly include:
(1) Camera connector (quantity * 4) Rosenberger 59 Z 101
(2) Harness docking connector (quantity 6+6, a total of 12) Rosenberger 59 Z 101 and Rosenberger x59 Z 078-000-y
(3) Connector on the ZFAS (quantity * 4) Rosenberger 59 Z 101
The harness is mainly composed of LEONI Dacar® 462 KOAX, which costs about 0.22 USD per meter. According to the statistics of the entire harness, it adds up to 18 meters, corresponding to 3.96 USD. The cost of the entire set of connectors is approximately 24 USD, of which the cost of the connectors is approximately 11 USD.
In conclusion: From the perspective of value breakdown, we still need to focus on the value breakdown of the entire system and find the most valuable part.
“`
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.