
Author | Panjiang
Since the birth of the automobile more than a century ago, chassis development has been closely linked to the development of automobiles. This is not surprising, as the chassis system determines the six degrees of dynamic behavior of the car in the longitudinal, lateral, and vertical directions, and is a necessary condition for the car to run. Although Geely Automobile founder Li Shufu once said jokingly that “making a car is just a few sofas with four wheels,” it also reflects the importance of the chassis: as long as the driver can control the chassis, whether sitting on a sofa or a bench, the car can at least run.
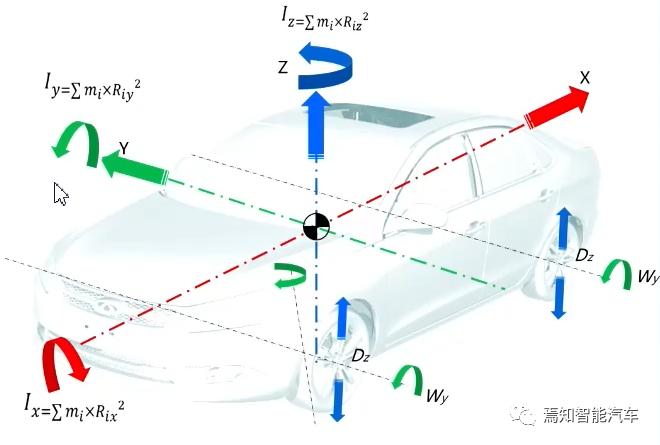
According to the broad definition, the components of the chassis system are numerous, including not only the drive, steering, and brake systems, but also the body and clutch components. However, from the perspective of controlling the six degrees of freedom, the chassis system can be subdivided into the following subsystems.

On the other hand, looking back on the development of the chassis system, it can be summarized into three periods:
-
Mechanical period
-
Electro-mechanical period
-
Intelligent period
In the early days, when the quality of vehicles was relatively small and the speed was relatively low, the mechanical chassis was able to meet the driver’s control needs. The driver directly controls the six split forces of the tire through the operation of the steering wheel and pedals, thereby indirectly changing the three-way translational and rotational degrees of freedom of the vehicle. With the development of science and technology and the automobile industry, especially the development of military vehicles and military technology, the chassis system has also made new breakthroughs, such as the introduction of hydraulic steering and hydraulic braking, which is a major technological innovation in the mechanical period of the chassis. At the same time, as vehicles became heavier, power steering and braking systems began to be widely used in chassis control, providing steering or braking assistance to the driver. However, fundamentally speaking, the motion control of vehicles in this period depended entirely on the driver’s input.

In the electro-mechanical period, traditional mechanical and hydraulic designs are combined with single-chip microcomputer control to further reduce the driving burden of drivers, and software-controlled assistance can be used to better control the vehicle, greatly improving its fuel economy, safety, and comfort.Using the electro-hydraulic brake booster system eBooster as an example, eBooster utilizes sensors to perceive the force and speed of the driver pressing the brake pedal, and after processing the signal, it is transmitted to the electronic control unit. The electronic control unit controls the corresponding torque of the power-assist motor. Under the driving of the mechatronic amplifier, the brake pump is driven, thereby realizing electronic control of the brake system, with faster response speed and more precise control of pressure.

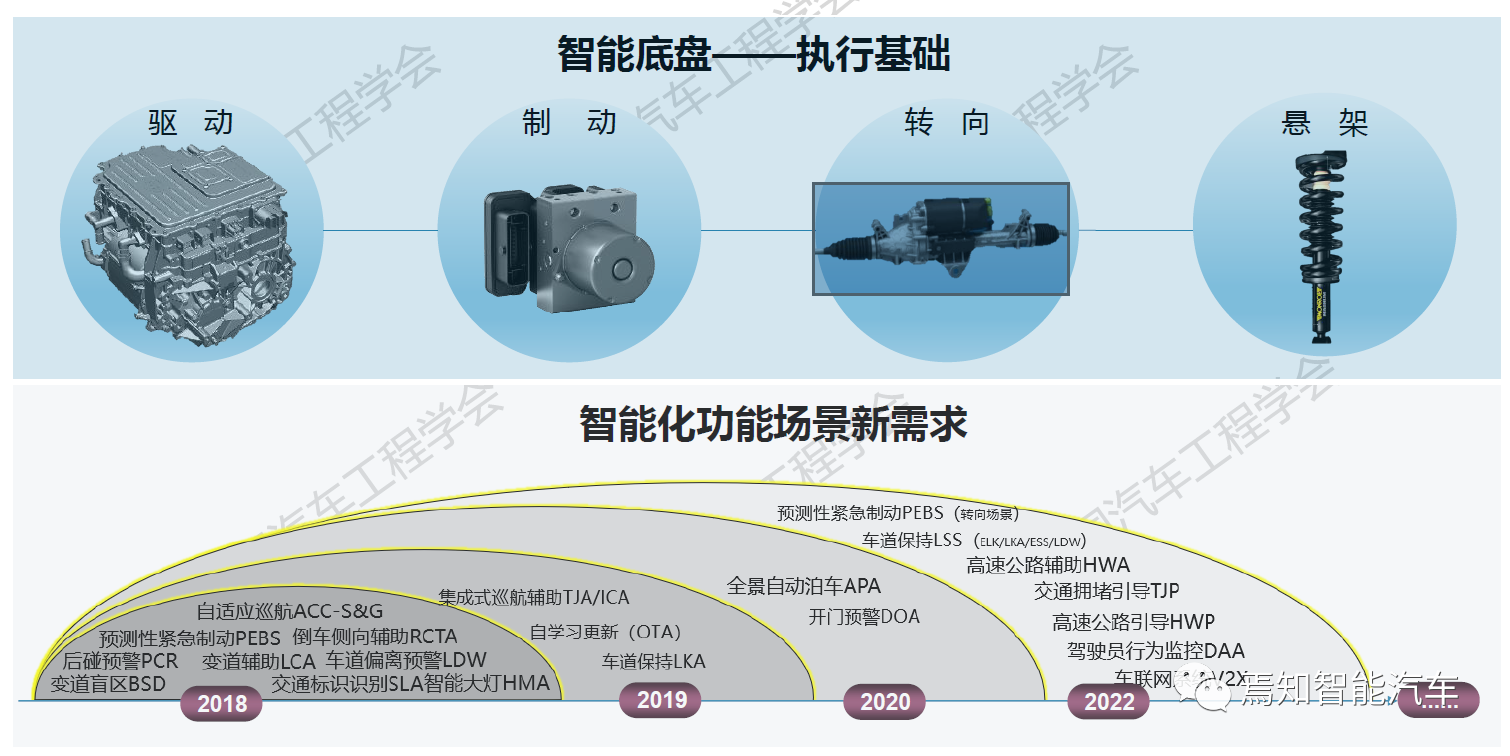
In the current trend of electrification and intelligence in the automotive industry, traditional power has been upgraded to three-electric systems, with traditional mechanical components in the chassis system becoming streamlined and the level of electronic control increasing. At the same time, with the increasing popularity of advanced driver assistance systems (such as ACC, AEB, etc.) and the gradual deployment of autonomous driving systems, there are emerging demands for more diverse intelligent scenarios.
On the other hand, consumer markets have also been changing their perception of automobiles. Terminal consumers no longer regard vehicles solely as transportation tools. Rather they see cars as carriers and spaces that enhance their quality of life. This consumer trend implies that as the industry pursues automotive intelligence, it also needs to further improve comfort and driving quality, providing consumers with a more enjoyable driving experience.
Driven by this trend, automobiles have also placed higher demands on the chassis system. A more intelligent chassis is required to adapt to the development needs of automotive electrification and intelligence.
The new demands for an intelligent chassis can be summarized into four categories:
-
Personality: provide personalized customization based on customer driving habits
-
High performance: the system responds more accurately and rapidly
-
Scalability: the system has self-learning capabilities and supports OTA upgrades
-
High safety: multiple safety guarantees for product and information security
Although the chassis system is still in the era of electromechanical hybridization from current market performance, we can already see the trend of transitioning to an intelligent chassis.Firstly, the popularity and evolution of wire control technology in cars should be mentioned. Originating from aircraft control systems, wire control technology converts the pilot’s manipulation command into an electrical signal, which is then directly transmitted to autonomous servos via a cable. The biggest advantage of wire control technology is its precise and rapid response, which has been inherited in car wire control technology. Currently, all chassis control subsystems have already implemented wire control, but chassis wire control technology is mostly reflected in the control decision-making level, while the execution level is still reliant on mechanical or hydraulic systems. With the evolution of autonomous driving, the role of the driver has been weakened, and the functions of the steering wheel and pedals are gradually reduced. The execution mechanism of wire-controlled chassis has presented a trend of being replaced by electronic control instead of hydraulic or mechanical systems.
Moreover, the electronic control system and driver’s mechanical interface are decoupled, allowing for a more flexible adjustment of the characteristics of the chassis system to meet the personalized demands of different customers. This is another advantage of wire-controlled chassis.
The pursuit of personalized demand by intelligent chassis systems is also reflected in the lower price range of vehicles equipped with active suspension systems. As we know, the core of suspension system calibration lies in coordinating the contradiction between comfort and stability, while active suspension systems are considered to be the answer to having the best of both worlds. It can accurately perceive information such as vehicle conditions and road conditions and automatically adjust suspension height, stiffness, and damping, thereby significantly improving vehicle stability and comfort. Additionally, the system can learn the user’s driving habits and adjust the most suitable suspension control strategy for them.
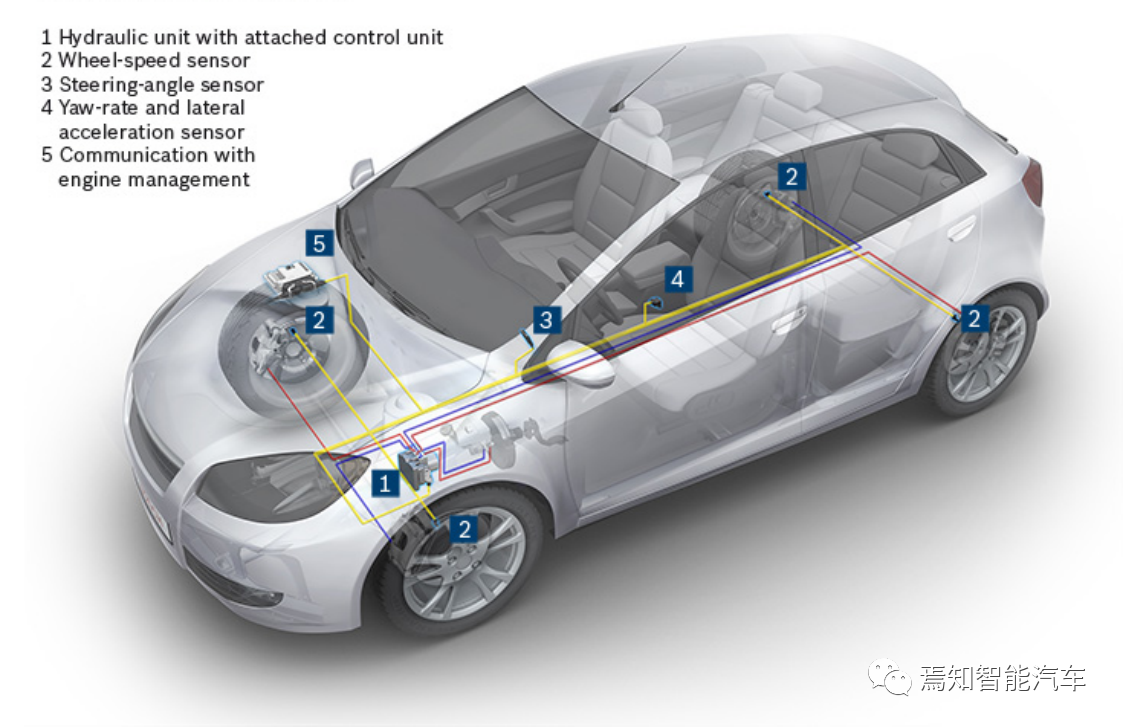
Secondly, the transformation of the intelligent driving system E/E has also spurred the evolution of the intelligent chassis E/E. In the electromechanical hybrid period, the E/E architecture of the chassis system merely consisted of the simple subsystem ECU stacking. Although there was cooperation between subsystems, this cooperation only reflected the information sharing level, and each subsystem still acted independently and function control is constrained by each other, with a slow response that did not reflect the effect of “1 + 1 > 2”.
For example, the Electronic Stability Control system (ESC) depends on the state input of the steering system and the braking system to determine whether the vehicle has a tendency for insufficient or excessive steering, and adjusts the lateral roll rate control by modifying the wheel-end braking force to make the vehicle return to a stable state. In this process, the performance of the steering system will have a real-time impact on the speed of stability control adjustment, but its influence can only keep the braking system in a “remedial adjustment” cycle. In other words, the steering system cannot play an “active assistance” role in stability control.
Under the new E/E architecture based on the chassis domain controller, the intelligent control core functions are concentrated within the domain controller, which performs real-time collaborative control of subsystems, with precise and fast responses, breaking down the barriers of simple subsystem stacking.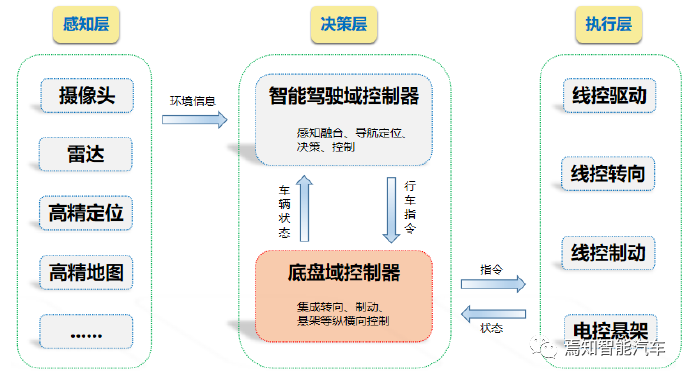
For example, for the same electronic stability control system, the domain controller can integrate the vehicle status feedback from various subsystems, and intervene in control in a timely manner before the vehicle reaches the limit of dynamic stability, making quick corrections to braking, steering, and even suspension. Compared with traditional control, it has changed from “remedial control” to “preventive control”, which not only is safer, but also makes the driver more comfortable.
At the same time, the chassis domain controller has powerful hardware computing capabilities and rich software interfaces, which can realize the decoupling of software and hardware, and is conducive to supporting OTA upgrades, thereby achieving rapid optimization and iteration of core algorithms.
Safety has always been an important issue in chassis system design. The development of intelligent vehicles has extended new safety topics to intelligent chassis.
SAE J3016 classification of vehicle automation levels is not unfamiliar to readers. If these five levels are further classified, they can be summarized as:
-
Assistance driving (including Level 1 / Level 2)
-
Autonomous driving (including Level 3 / Level 4 / Level 5)
The biggest difference between assistance driving and autonomous driving is the responsibility for accidents caused by system failures:
-
For assistance driving, when the system fails, as long as the failure is reported correctly to the driver, whether it can be rescued or not depends entirely on the driver’s level. If an accident occurs, the responsibility lies with the driver, and the car manufacturer has no responsibility.
-
For autonomous driving, after the system fails, the system needs to operate itself to avoid accidents (the higher the level of autonomous driving, the later the driver can intervene or even not intervene at all). If an accident occurs, the responsibility lies with the car manufacturer, not the driver.
Functional safety requirements when the E/E system fails, the vehicle needs to be able to enter a safe state in a timely manner to avoid the risk of unreasonable human injury. This requires that the autonomous driving system needs to be redundantly designed to ensure that the system can take over until it enters a safe state when a single failure occurs while freeing the driver.
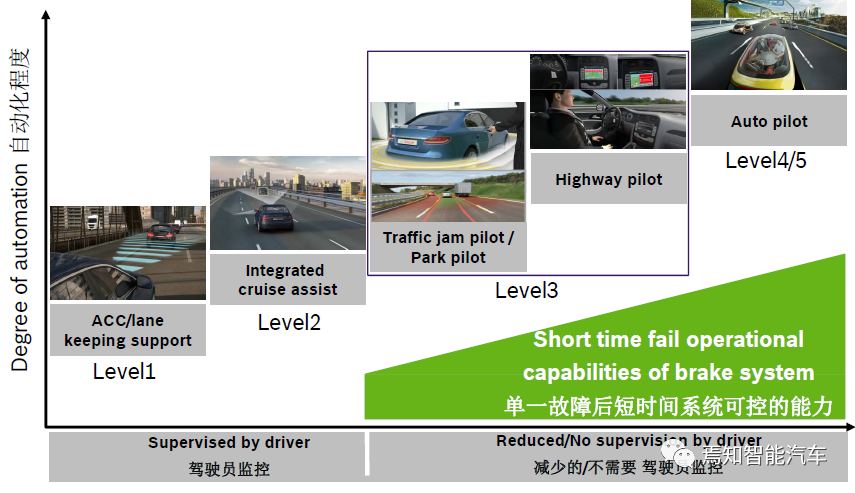
For high-speed autonomous driving systems, when a single failure occurs during high-speed operation, the safety state is usually defined as an emergency lane for stopping. To achieve this safety state, the currently widely agreed solution in the industry requires the following redundancy:
-
Communication redundancy: When a single link has a signal interruption, the system can achieve seamless and safe information connection.- Low-voltage power redundancy: After the main power supply fails, the backup power supply can support ECU to complete the safe downgrade action;
-
Perception redundancy: Multi-sensor data fusion technology can ensure the accurate recognition of objects and pedestrians in the vehicle’s driving composition, thereby supporting the vehicle to make correct control behaviors at all times;
-
Brain controller redundancy: Two brains supervise each other and serve as backups for each other. When the primary brain fails, the backup brain takes over in time;
-
Brake redundancy: After the main brake system fails, the backup system still provides a certain level of braking ability to maintain braking control and braking stability control;
-
Steering redundancy: If the safe state after the failure is defined as continuing to operate rather than stopping, after a single steering system failure, the backup system needs to support the vehicle to complete the turning conditions in the next operating scenario.
It can be seen that the redundancy design of an intelligent chassis is important and necessary to achieve functional safety of an automatic driving system.

The purpose of functional safety is to control software and hardware failures within an acceptable range, but even if there is no software or hardware failure, the system may still cause unreasonable risks due to functional limitations. This is the safety issue that the international standard ISO 21448 (SOTIF, Safety of the Intended Functionality) is concerned about.
The object of functional safety and SOTIF research is the risks caused by the failures that an intelligent driving system itself may produce, and another type of risk that cannot be ignored by an intelligent driving system is hacker attacks. In addition, functional safety and SOTIF are based on personal safety, but not all information security issues will lead to personal safety. In other words, in addition to considering personal safety, information security also needs to consider other risks brought about by hacker attacks, such as property losses and privacy risks caused by vehicle theft.
At present, the general consensus reached by the automotive industry is that functional safety, expected functional safety, and information security are the “three horses” that ensure the safety of automotive intelligence, and the automotive industry is still in the initial stage of implementing these three directions.

It can be seen that to meet the new requirements for the electrification and intelligence of automobiles, the development ideas of the intelligent chassis are gradually becoming clear; and from the perspective of implementation, the development of the intelligent chassis has just started, and it can be foreseen that it will face many challenges.However, challenges also bring opportunities. Firstly, at the national strategic level, intelligent electric vehicles have become the strategic direction of China’s automotive industry development. This means that as the support base of intelligent electric vehicles, intelligent chassis has a good development soil. Secondly, the sustained increase in market demand for intelligent electric vehicles has also provided economic support for the development of intelligent chassis. And under the new E/E architecture, a new mode of cooperation and division of responsibilities between OEMs and suppliers has emerged, creating a rare opportunity for the rise of local Chinese brands.
With the encouragement of these positive factors, we believe that intelligent chassis has a bright future.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.