In terms of hardware, optical devices actually impose restrictions on the exterior design, system structure, and space of the entire automotive industry. Therefore, we can see various components such as LiDAR and millimeter-wave radar on the front of the current cars, integrating different sensors together. If these sensors can also be integrated into the headlights, where optical components can be well protected, it would be very valuable.
Optical Integration by XenomatiX and Marelli
Although XenomatiX and Marelli are both optical companies, they are not in the same field of expertise. XenomatiX is a company that provides solid-state LiDAR solution, while its designed and built products and software can achieve accurate real-time 4D-6D digitization, which helps to understand the surrounding environment of the vehicle. Marelli’s product portfolio includes laser, LED matrix, digital headlights, and OLED taillights.
Marelli has reached an agreement with XenomatiX to merge LiDAR with automotive lighting. This collaboration is a typical exploration of “heterogeneous” integration.
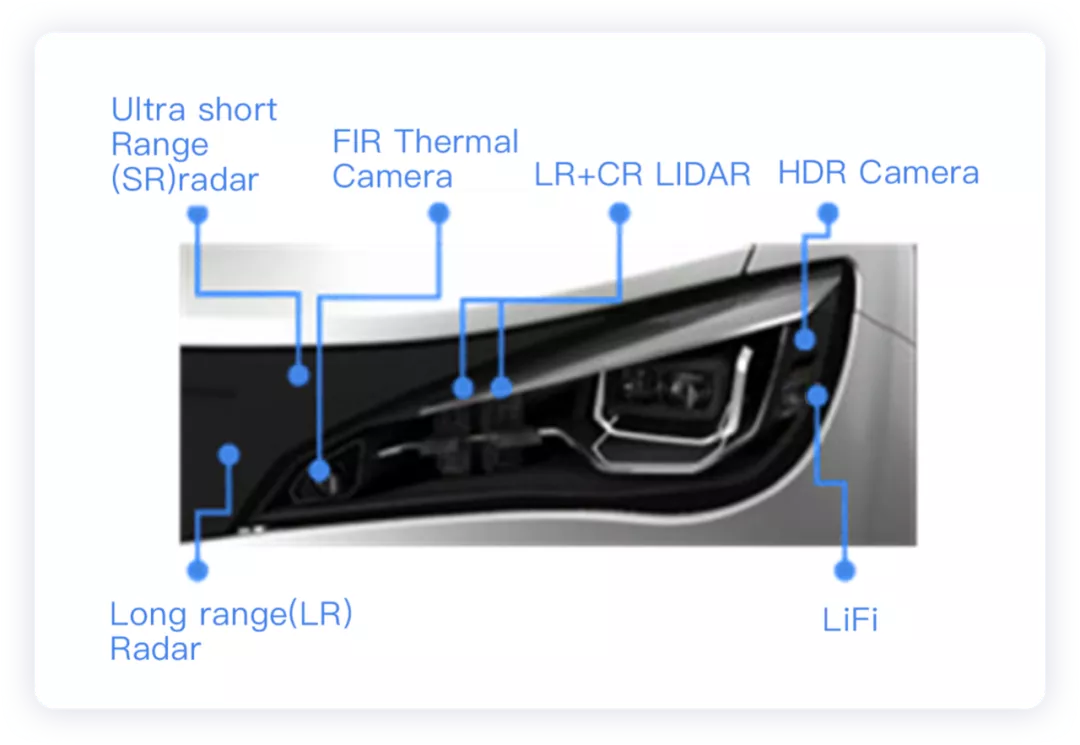
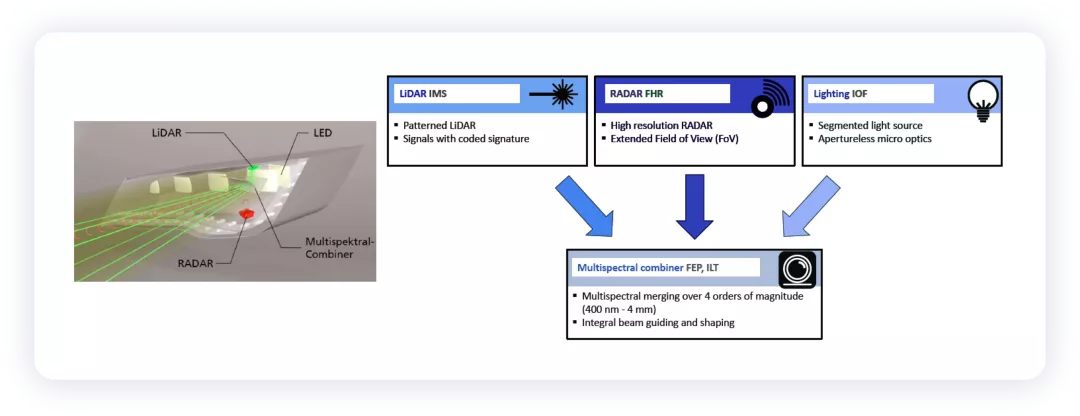
Overall, for vehicle layout engineers, a large number of sensors installed on cars, including LiDAR, present unnecessary protruding shapes and space limitations for handling structural components of the vehicle, which pose significant integration challenges for creating appealing vehicle shapes. Another very important issue is that these optical devices are not resistant to cleaning, and they need to cope with various weather and vehicle conditions. In conjunction with the original lighting system’s cleaning and diagnosis, integrating sensors into lighting elements and systems and using the original position and priority consideration of the lighting system by the automotive manufacturer can provide unobstructed vision for a large number of sensor elements in the future.After integrating the camera, software algorithms can inspect whether the image is polluted by mud, scattered light (fog) and external light sources. Basic algorithms for efficient cleaning and established dirt detection can be integrated in the integrated assembly. In Fraunhofer’s basic research, not only the entire lamp system is designed, but also the integration of multispectral CMOS vision sensors (MFOS) can be used to detect key environmental parameters (fog, rain). The laser radar has been incorporated into various locations by various automakers including the top or bottom of the B-pillar, behind the rear window, in the side mirror, in the sensor bar under the roof, turn signal lights, and so on. The small size of the laser radar, which has constantly been reduced from a large size, is a basis for easy integration. Through different positions, various FOV (field of view) that the vehicle needs to sense can be effectively covered completely, similar to the 360-degree mechanical laser radar that Google did. In the foreseeable future, laser radar will play a critical role in autonomous driving assistance systems. How to effectively set up FOV for different vehicle models has become a challenge, and Tesla follows the path of pure vision by using the same number or fewer sensors to do more. With the continuous improvement of the technical ability of laser radar, the entire scene can be effectively and clearly detected without distance or power restrictions. Meanwhile, flexible modular design that provides different perspectives, ranges, resolutions, and frame rates is adopted. The key is still in the development of semiconductor laser sources and detectors. The innovation capability of automotive technology lies in device and software levels, and I believe Tier 1 is becoming more and more centralized and focusing on deep knowledge, such as in the field of optics fusion.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.