Disassembly of the Model S Plaid’s computing platform
Ingineerix’s disassembly of the Model S Plaid is still ongoing, and I haven’t yet completed the analysis on the driving system. However, what’s currently more interesting is that the disassembly video of the next-generation computing platform is already available, which I downloaded and am sharing with you now.
Components like the Main Processor, GPU, and Modem haven’t officially entered into the production sequence yet, but were already being experimented with on engineering samples. Tesla did a great job in developing this big toy.
Basic information on the disassembled platform
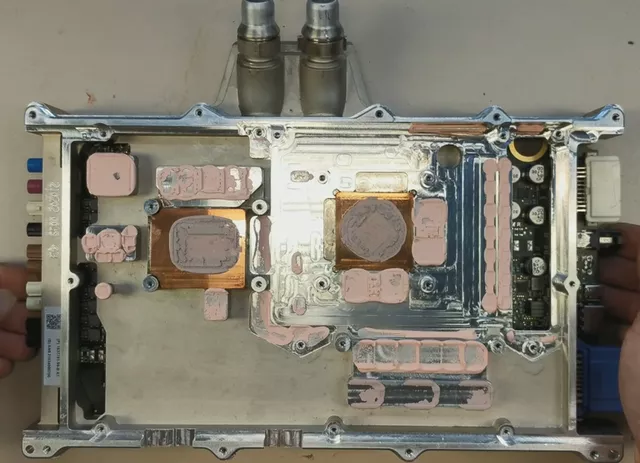
According to the information provided by Ingineerix, there are a total of 4 boards here (2 large + 2 small), which include the entertainment system, communication board, and GPU board, in addition to the AP board, which remains the same as before.
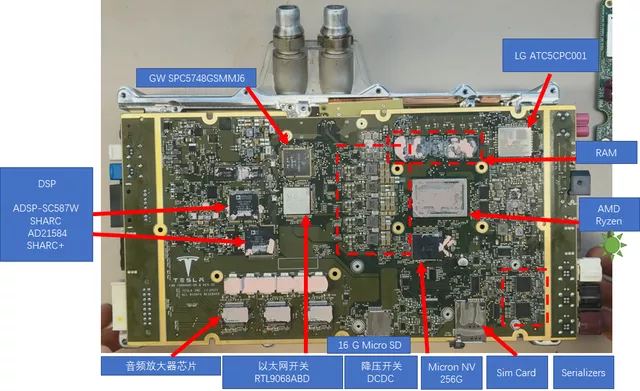
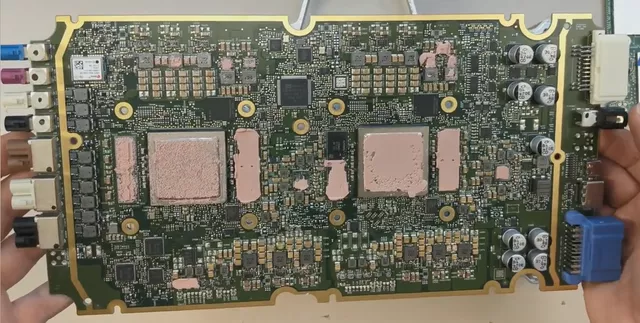
The main processor is AMD Ryzen YE180FC3T4MFG (a 4-core 45W Ryzen embedded processor) with 512 KB L2 cache per core and 4 MB L3 cache.
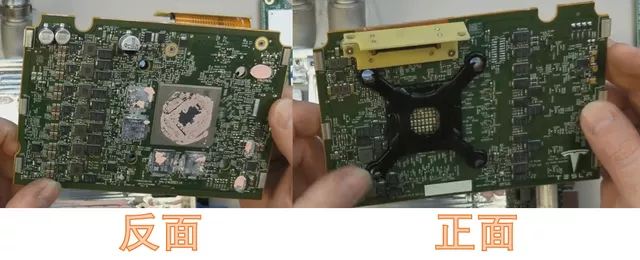
The GPU is AMD Radeon 215-130000026, similar to the Radeon Pro W6600.
The Wifi/BT module is LG Innotek ATC5CPC001.
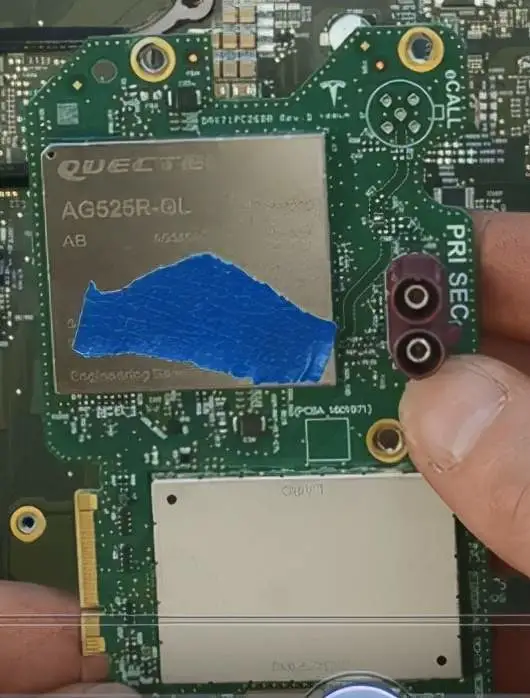
The mobile communication Modem is Quectel AG525R-GL.
The gateway is SPC5748GSMMJ6.
DSP 1 is an ADSP-SC587W SHARC+ dual-core DSP with ARM Cortex-A5.
DSP 2 is an AD21584 SHARC+ dual-core DSP with ARM Cortex-A5.
The Ethernet switch is Realtek RTL9068ABD.
I have the wiring diagram for connecting the wire harness, so when I have some free time, I will match the physical components with the wiring diagram to get a better view of the effect.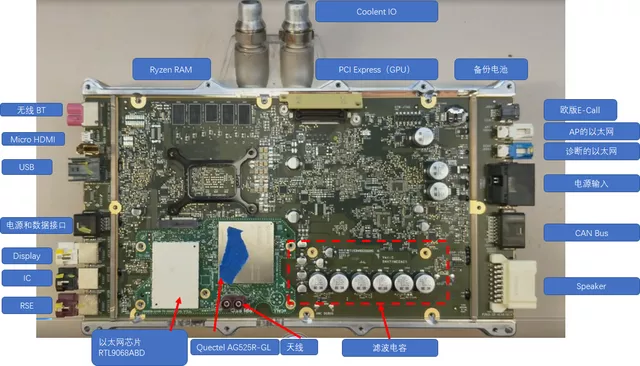
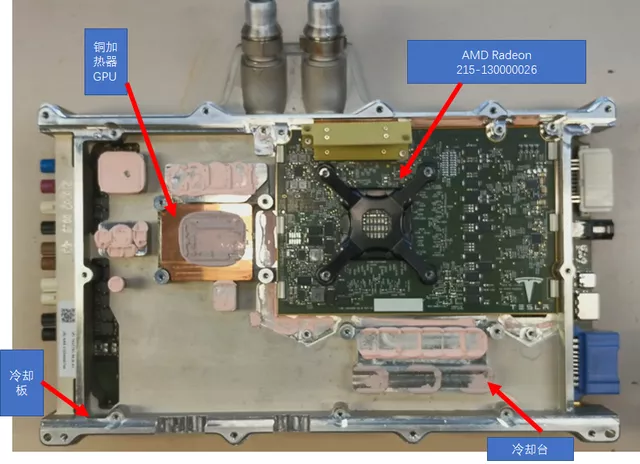
Underneath this board, there is indeed the long-awaited AMD Radeon chip AMD 215-130000026. Logically, the several video outputs (2.7Gb/s HBR and 5.4Gb/s HBR2) also correspond to the Model S Plaid’s dashboard; there is also an HDMI output, corresponding to the dashboard, the central control screen, and the rear display screens.
In terms of storage, 16Gb of GDDR6 memory is used.
Iterative Process
In the two major systems of Smart Cabin and Autopilot, Tesla’s hardware iteration speed is also very fast.
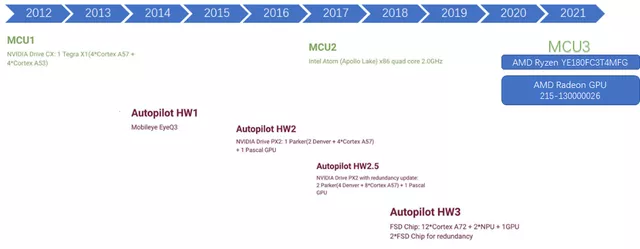
Looking at the timeline:
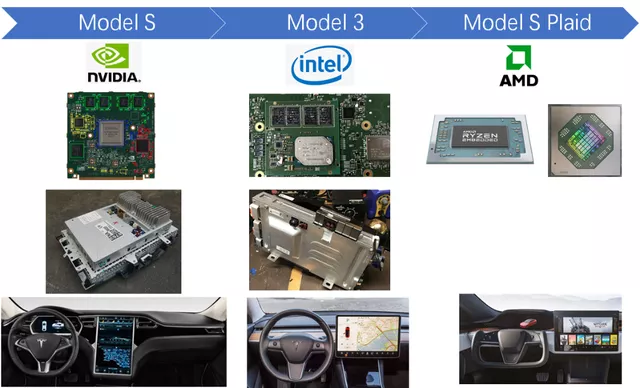
MCU1 was launched in 2012, using Nvidia Drive CX, which is based on the Tera X1 processor;
MCU2 was launched in 2017, switching from Nvidia to Intel’s Atom E3950;When it comes to Model S Plaid, it uses AMD Ryzen+AMD Radeon 215-130000026.
In the field of autonomous driving, from the first-generation Autopilot HW1 with Mobileye Eye Q3, to the second-generation Autopilot HW2 mainly using Nvidia’s Drive PX2, which uses one Parker and Pascal GPU and added two additional Parker and Pascal GPUs after one year. And by the third-generation, Tesla entered the chip field and adopted its own FSD chip as shown in the following figure.
In summary, the overall trend of the cockpit was discussed with a friend yesterday. I believe that the cockpit and computing platform are very difficult for general companies to handle, which requires persistence, including the car manufacturer’s prediction of the technology and market acceptance of the cockpit itself. It’s highly probable that many car manufacturers will conduct one round of self-development first, and switch if it fails, which is actually a process of resistance.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.