Key Points:
-
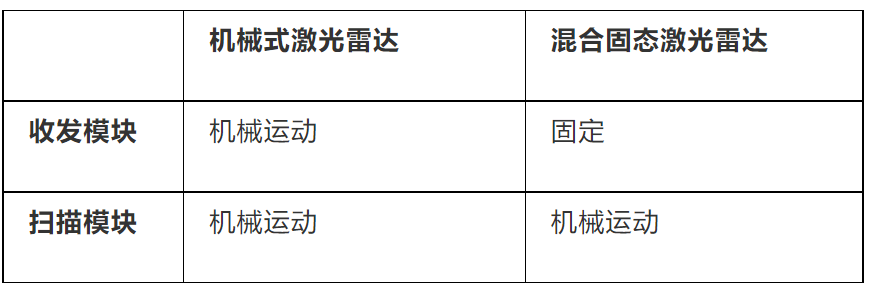
Mechanical LiDAR, such as mechanical scanning LiDAR and hybrid solid-state LiDAR (MEMS, rotating mirror, prism), is also mechanical scanning.
-
Frequency Domain is an indicator that comprehensively and comprehensively reflects the perception ability of LiDAR, which is more important than FOV, resolution, and refresh rate, just like the “hundred kilometers acceleration” of a car.
-
Overall, compared with the scanning module, the transmitting and receiving module is the “engine technology” of the LiDAR industry.
-
The chipization of the electronic components of the transmitting and receiving module is the trend and technical barrier for the future development of LiDAR.
All hard-tech industries have their own technical barriers, and companies that build the highest technical barriers will occupy advantages in the competitive landscape and therefore “whoever gets the barrier gets the world.”
In the era of traditional fuel vehicles, the killer-level technical barrier of various car companies is undoubtedly engine technology. Research and development of new engines often have a long cycle and high difficulty. Despite this, major car companies have invested a lot of resources to improve their engine technology.
Car companies are willing to constantly invest in engine technology and do this “difficult but right” thing, nothing more than to build and strengthen their own technical barriers.
So, in the field of LiDAR, what is the core technical barrier, similar to engine technology in the automotive field?
Before answering this question, we need to first figure out a question: what do people care about when discussing LiDAR?
What do people care about when discussing LiDAR?
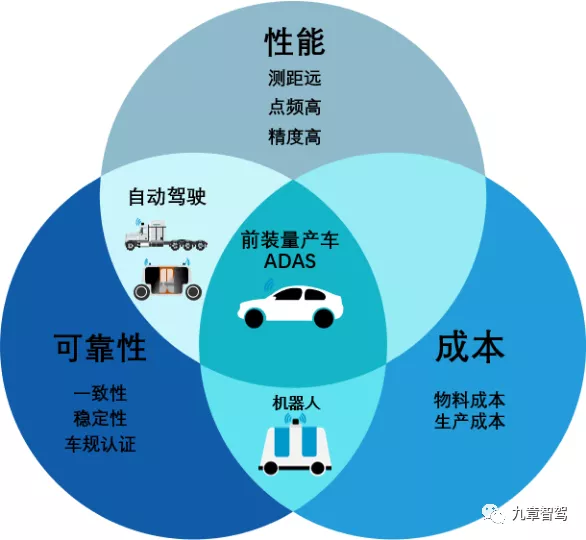
The actual users of LiDAR are concerned about three points: performance, reliability, and cost.
Performance generally refers to parameters such as ranging capability, accuracy, field of view, resolution, refresh rate, volume, and power consumption. Reliability is whether it can pass the vehicle regulations, and cost is the key factor that determines whether LiDAR can be mass-produced.
Of course, different scenarios have different requirements and preferences for the use of LiDAR:
-
Robotaxi has extremely high performance requirements and relatively high reliability requirements, so generally uses high-beam and high-performance LiDAR;
-
The L4 autonomous driving scenario in low-speed closed scenes (such as ports, sanitation, mines, etc.) generally uses low-beam LiDAR, which has high requirements for cost and reliability;
-
ADAS scenarios have gradually started to install LiDAR in the front, with very high requirements for performance, reliability, and cost.
 As one of the early representatives of mechanical LiDAR, Velodyne is known for its excellent performance, but also for high costs, complexity of installation and calibration, and difficulties in mass production and reliability improvements. In order to address these issues, LiDAR manufacturers have explored various laser transmitter and receiver modules, scanning modules, and other components, leading to a series of technical terms such as MEMS, OPA, solid-state, hybrid solid-state (semi-solid-state), VCSEL, and SPAD.
As one of the early representatives of mechanical LiDAR, Velodyne is known for its excellent performance, but also for high costs, complexity of installation and calibration, and difficulties in mass production and reliability improvements. In order to address these issues, LiDAR manufacturers have explored various laser transmitter and receiver modules, scanning modules, and other components, leading to a series of technical terms such as MEMS, OPA, solid-state, hybrid solid-state (semi-solid-state), VCSEL, and SPAD.
It is worth emphasizing that whether it is using mirrors, prisms, or MEMS micro-mirrors, their essence lies in changing the direction of light propagation through mechanical moving parts to achieve scanning. Therefore, strictly speaking, these technologies cannot be called “solid-state,” and should be defined as “hybrid solid-state” or “semi-solid-state.” The differences between these technologies will be discussed in detail later in this article.
Considering the current confusion surrounding LiDAR discussions, let’s first provide a simple overview.
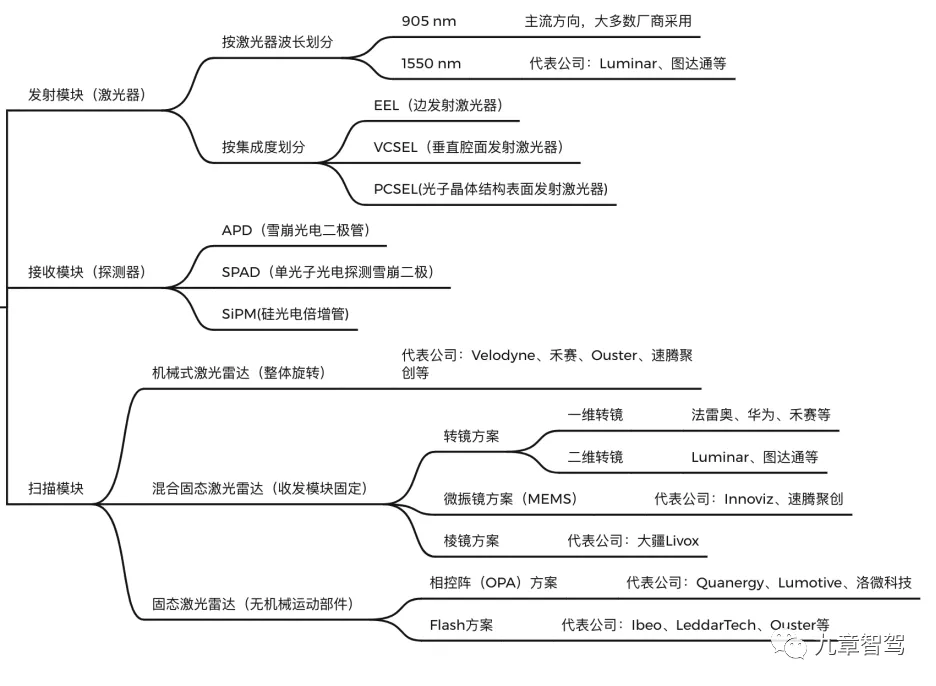
Based on ranging principles, LiDAR can be divided into time-of-flight (ToF) and frequency-modulated continuous wave (FMCW), with ToF being the mainstream technology adopted by most manufacturers.

ToF LiDAR devices, based on their components, can be divided into laser emitter, receiver, scanning, and digital processing modules.
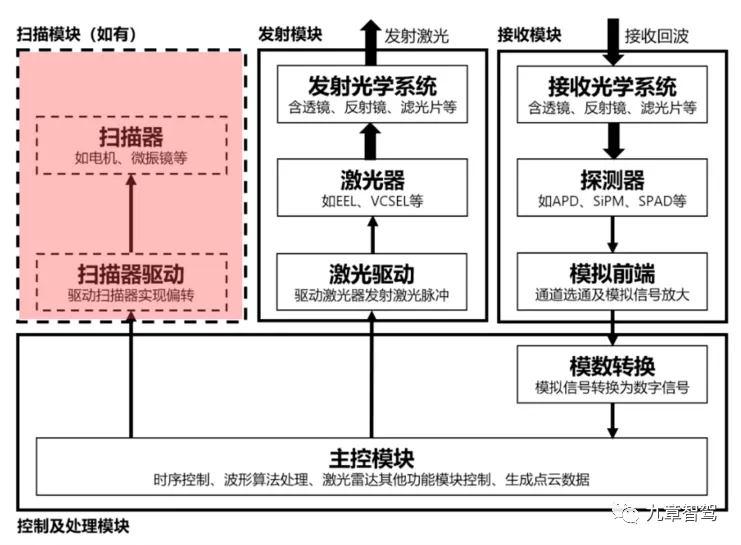
The technical routes of different LiDAR manufacturers may differ significantly in terms of laser emitter, receiver, and scanning modules. Discussions in the industry regarding hybrid solid-state and solid-state LiDAR mainly revolve around the scanning module, which is the red section in the upper left corner of Figure 3.
Returning to the structure of LiDAR, the laser transmitter and receiver modules are closely related, and we refer to them collectively as the transmitter-receiver module. Its function is to use the laser transmitter to emit light and have the detector receive the returned light. It is an optoelectronic conversion and complex signal processing module, essentially an electronic component.
The scanning module, on the other hand, essentially changes the direction of light propagation continuously to meet the requirements of field-of-view (FOV) coverage using a limited number of transmitter-receiver channels. It can be compared to a machine gun on a tower defense game that needs to defend against attacks from all directions. If it cannot fire in all directions simultaneously, it needs to use a swinging machine gun to cover a wider area.
Whether using a mechanical or hybrid solid-state scanning method, scanning is achieved by continuously changing the direction of light propagation through mechanical movement.Therefore, mechanical LiDAR is based on mechanical scanning, and hybrid solid-state LiDAR is also based on mechanical scanning.
Is Scanning or Transceiving the Core Technological Barrier for LiDAR?
Based on the above information, we know that LiDAR mainly includes transceiver modules and scanning modules. Currently, the discussions in the market mostly revolve around scanning-based differentiation, such as mechanical, hybrid solid-state, and solid-state, and further types such as MEMS micro-mirror, rotating mirror, one-dimensional scanning, and two-dimensional scanning in the hot and emerging hybrid solid-state solution.
So, is the scanning module the core technological barrier for LiDAR?
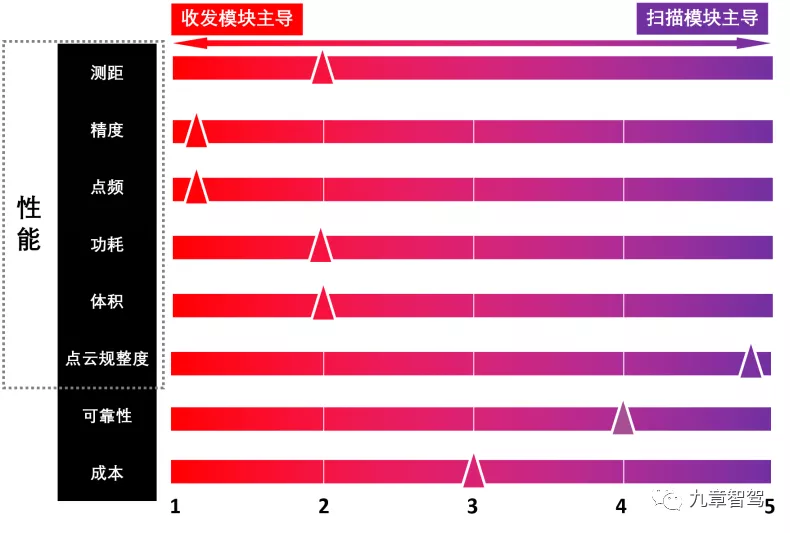
Since the main structure of LiDAR is transceiving + scanning, let’s trace back to the origin and understand how performance, reliability, and cost are fundamentally influenced by the transceiver and scanning modules. We further break down the three aspects into smaller indicators as the y-axis and take the influence of the transceiver and scanning modules on the indicators as the x-axis. A value of 1 on the x-axis means that the indicator is mainly determined by the transceiver module, and a value of 5 means that the indicator is mainly decided by the scanning module. We obtain the following figure.
First, let’s take a look at the performance indicators that users care about, including range capability, accuracy, field of view, resolution, refresh rate, power consumption, volume, and point cloud regularity.
Range Capability
Detection range refers to the range that the LiDAR can detect, reflecting the ability of LiDAR transceiving and signal processing. The higher the efficiency of transceiving and the stronger the signal processing capability are, the stronger the range capability is. In practical use, the range capability is also related to the reflectivity of the measured object. The higher the reflectivity, the more reflected light is received, and the longer the detection range. Therefore, the detection range is generally “grouped” with reflectivity, such as 150 meters @ 10%, indicating that the detection range is 150 meters under the condition that the target reflectivity is 10%.Translated English Markdown Text:
Regarding some car manufacturers exaggerating the performance of their products, they may publicly advertise detection distances based on 50% or 80% reflectivity, or even avoid mentioning reflectivity altogether. In response to these issues, industry insiders have criticized those who speak of detection distances without specifying reflectivity as being fraudulent.
In figure 8, the coordinate value of range-finding ability is 2, indicating that range-finding ability is mainly determined by the transceiver module, which includes the emission power and wavelength of the laser, as well as the sensitivity of the detector.
Why isn’t range-finding ability entirely determined by the transceiver module? That’s because sometimes the scanning module can also affect range-finding ability. For example, it is widely believed in the industry that if the aperture of the scanning mirror is too small, the range-finding ability will be limited. The MEMS solution has a smaller aperture than the gimbal solution.
Accuracy
Accuracy refers to the precision of detection distance. The higher the detection accuracy, the more accurately a target can be characterized. The accuracy reflects the waveform processing capability, which is mainly dependent on the transceiver module and weakly dependent on the scanning module. Therefore, the coordinate value of range-finding accuracy is 1 in Figure 8.
Field of View, Resolution, and Refresh Rate
Users are particularly concerned with the field of view (FOV), resolution, and refresh rate, as they are often interdependent and affect each other. Therefore, we discuss them together.
FOV (Field of View) refers to both horizontal and vertical directions, just like using a projector to project onto a wall: the larger the coverage range, the better.
Resolution refers to the angular spacing between two adjacent detection points. It is divided into horizontal and vertical angular resolution. The smaller the angular spacing between adjacent detection points, the higher the ability to resolve details of the target.
Refresh rate refers to the scanning frequency of the LiDAR on the targets, expressed in Hz, indicating how many times it can scan per second.
In fact, these three parameters are interdependent and affect each other. Changing one parameter can adjust the other two parameters. If one parameter is emphasized without specifying the other two parameters, it is unfair and even misleading.
At the 2019 CES exhibition, a manufacturer set the refresh rate to 1Hz to demonstrate the high resolution of its LiDAR system, which it advertised as “equivalent to 640 lines.” In reality, a 1Hz refresh rate results in a lag in the LiDAR system’s ability to track dynamic targets and therefore cannot be used.
Some manufacturers also emphasize the “highest resolution” that can be achieved within a small range, which is also a cheat. What is the angular resolution in the sparsity region of the beam? They don’t say.
Is there an industry-recognized index that can comprehensively and fully reflect the perception ability of LiDAR?
Yes, that is the “Point Frequency.”The point cloud refers to the total number of detection points that the LiDAR completes and obtains per second, also known as the point count or points per second, similar to the concept of the total pixels of a camera. Using point cloud to describe it, we cannot take advantage of reducing the refresh rate, and we can avoid the one-sided description of “highest resolution” caused by the size and non-uniformity of the field of view.
According to the definition, we can get the calculation formula of point cloud:

The average number of points in the horizontal direction and the vertical direction is equal to the field of view in the corresponding direction divided by the angular resolution of the corresponding direction. Therefore, for two-dimensional scanning, the above formula can be expressed in another way:

For one-dimensional scanning, the vertical direction of the beam is fixed, and the calculation formula is:

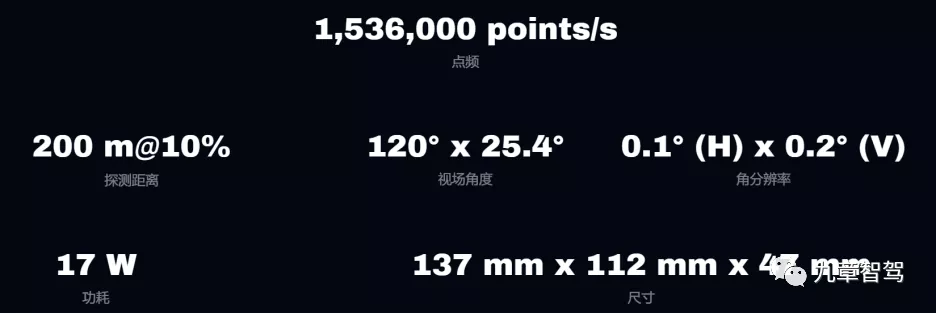
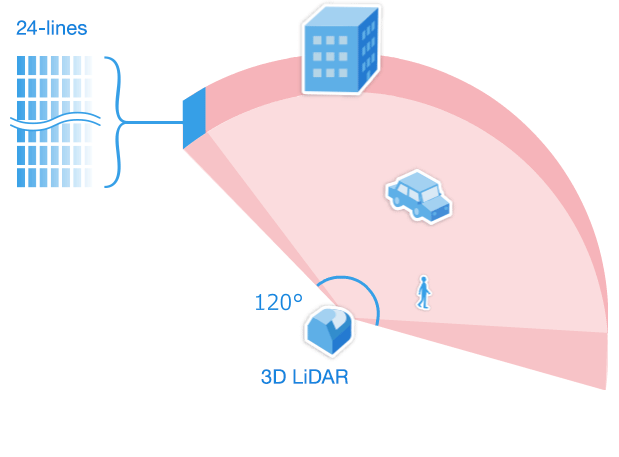
Taking Hesai’s hybrid solid-state LiDAR AT128 as an example, its horizontal FOV is 120°, the horizontal angular resolution is 0.1°, there are 128 lines, and one scan produces 120/0.1×128=153,600 points. The refresh rate is 10 Hz, and it scans 10 times per second. The point cloud is 153,600×10=1,536,000 pts/s, which is consistent with the officially announced data of over 1.53 million points per second.
Obviously, just like the pixels of a camera, the higher the point cloud, the better the LiDAR’s perception of the target.
It can be said that just as “acceleration per 100 kilometers” is the core performance indicator that measures the power of a car, point cloud is also the core performance indicator of LiDAR.
Some people may wonder: Can we improve the point cloud by increasing the scanning frequency of the scanning components to improve the refresh rate?
Increasing the scanning frequency can improve the refresh rate, but it will not change the point cloud.
Because if only the scanning frequency is changed, although the refresh rate is increased, the resolution is decreased and the point cloud remains unchanged.
To better understand this issue, let’s take the example of a machine gun: the point cloud is the number of bullets fired by the machine gun per second, and the scanning frequency is the frequency at which the machine gun swings left and right. Can we change the number of rounds fired by the machine gun per second by changing the frequency at which the machine gun swings left and right? Obviously not.The point frequency, although appearing to be the result of a calculation of three numbers, is actually a determining factor (the independent variable in the function, determined by external input factors), rather than a resultant factor (the dependent variable in the function, which can be determined by changing internal parameters). The three parameters of field of view (FOV), resolution, and refresh rate cannot determine or change the point frequency. On the contrary, the point frequency determines the restrictive relationship between the three parameters. If one parameter changes, the other two must also change accordingly.
To make an analogy: if the refresh rate is changed from 10Hz to 1Hz, the gun will swing slower and the scanning points will be denser, resulting in an increase in the horizontal angle resolution. On the premise of a constant refresh rate, if the FOV becomes larger, the bullets will naturally become sparser, resulting in a decrease in horizontal angle resolution. If the FOV becomes smaller, the area of bullet strafing will become smaller, and the scanning points will become denser, resulting in an increase in horizontal angle resolution.
So what determines the point frequency? In Figure 8, the score of the point frequency is 1, which is mainly determined by the transceiver module, as follows:
The upper limit of the point frequency for each laser is a comprehensive design choice that needs to consider performance requirements, total power consumption, lifespan, signal processing capabilities, etc.
The total number of lasers is determined by the architecture of the laser radar transceiver module. Therefore, can a higher point frequency of the laser radar be achieved by increasing the total number of lasers, that is, by using many machine guns to shoot simultaneously to emit more bullets per second? The answer is yes, but each machine gun is not cheap. Using a large number of lasers, it is difficult to achieve controllable total cost without chipification, which is also one of the industry barriers.
The following figure shows the point frequency of several mixed solid-state lidars converted from the point frequency and the total number of lasers based on official product manuals and exchanges with industry insiders. The lower the point frequency of each laser, the lower the proportion of time that each laser is excited (duty cycle), and the less negative impact on its lifespan.
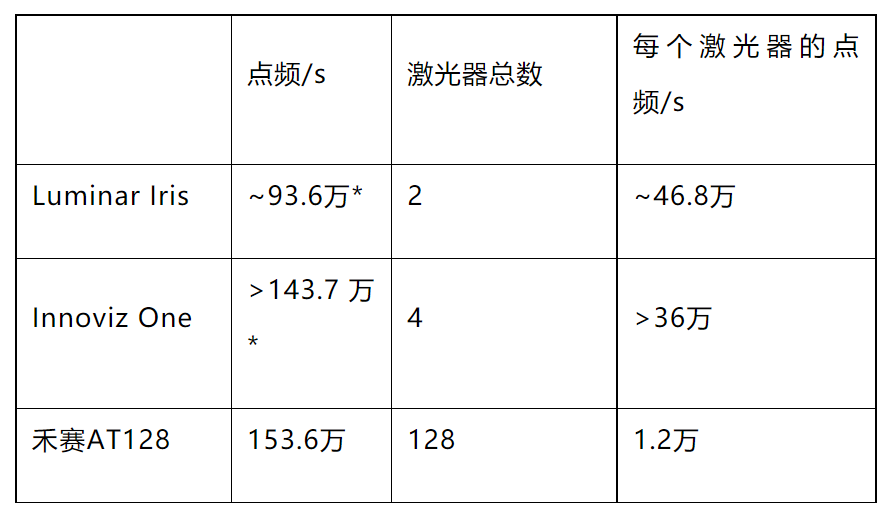
*Luminar Iris’s point frequency calculation logic: Point frequency = horizontal FOV * vertical FOV * point cloud density. Luminar Iris has an FOV of 120 degrees (H) x 26 degrees (V) and a point cloud density of >300 points/square degree. Assuming a frame rate of 1, the point frequency is 120x26x300=936,000.*The point frequency calculation logic for Innoviz One: According to the official website parameters, the FOV is 115 degrees (H) x 25 degrees (V), the resolution is 0.1 degrees (H) x 0.1 degrees (V), and the frame rate is 5-20 Hz. Therefore, the expected range of point frequency is 1,437,000 to 5,750,000. The selected point frequency is “>1,437,000”. According to Innoviz’s promotional materials in 2019, its point frequency is 6,000,000. Considering the timeliness of the materials, it is not adopted.
In communication with industry insiders, they revealed that to achieve high life expectancy, it is necessary to control the upper limit of the point frequency of each laser. However, for schemes with fewer lasers, it is necessary to solve the problem that the total point frequency is not enough. Many manufacturers in the market that reduce the number of transmitters have each laser point frequency that is already very close to or even exceeds the reasonable upper limit. It is okay to do demos, but there are challenges to the reliability of long-term work.
Power Consumption
The power consumption of the transmitting and receiving electronic modules in the lidar is much greater than that of the scanning mechanical module, because the electronic module needs to emit and receive light in the order of millions per second and each transmission and reception must be transformed into a 3D point cloud signal by complex analog and digital circuit processing. In contrast, the movement of the mechanical part does not output power to the outside and is generally a moving part at a uniform super-low resistance, just like a stable-running gyroscope, which does not require very high power to maintain. Therefore, the coordinate value in Figure 8 is 2. Generally speaking, the power consumption of one-dimensional scanning is lower than that of two-dimensional scanning.
Size
The scanning module of the lidar is generally a small proportion of the entire volume, whether it is the overall rotating disc of the mechanical lidar or the one-dimensional and two-dimensional mirrors. In the transmitting and receiving module, the optical and electronic modules responsible for transmitting and receiving occupy the main space. Often, due to the restrictions of optical focal length, vertical field of view, ranging ability requirements, or the constraints brought by the low integration of many channels, it is difficult to further compress their size.
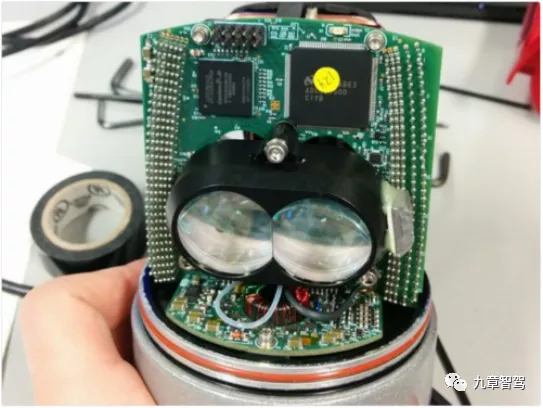
As shown in the internal structure of a certain manufacturer’s lidar in the figure below, the scanning structure is a layer below the bottom orange circle, and the transmitting and receiving module occupies the main volume of the lidar.
Point Cloud Regularity
The regularity of point clouds affects the difficulty of point cloud processing algorithms. In Figure 8, the score of this indicator is 5, which is mainly determined by the scanning components.
In terms of point cloud regularity, scanning methods that can form a horizontal and vertical matrix effect are best for algorithms, such as mechanical and one-dimensional mirrors. For two-dimensional mirror schemes, many lidar manufacturers believe that on the one hand, it is necessary to use multiple lasers to stitch the field of view, and there will be deformation at the edge. On the other hand, it is difficult to achieve an absolutely flat and rectangular matrix effect for the scan formed by two-dimensional motion, ultimately affecting the regularity of the point cloud.
Reliability## The Different Paths in the Evolution of the LiDAR Industry
Reliability, referred to as ‘pass-through specifications’ within the industry, is determined by both the transmitting and receiving modules and the scanning module. After all, if a certain component has a ‘shortcoming’ and does not pass the specifications, the entire assembly also cannot pass.
In general, the electronic components of the transmitting and receiving modules are relatively easy to pass the specifications, especially the upstream supply chain of the mainstream 905 nm wavelength adopted by major manufacturers is relatively mature. In comparison, the supply chain of devices based on 1550 nm wavelength transmitting and receiving modules is still at an early stage, posing a significant challenge for passing specifications.
However, regarding the impact on the pass-through specifications, the scanning module is more critical. Some manufacturers believe that except for one-dimensional mirrors, which have been validated by Valeo with low risk, other scanning methods such as mechanical, MEMS, and two-dimensional mirrors require time to prove their reliability.
Cost
Cost is determined jointly by the transmitting and receiving modules and the scanning module, with a coordinate value of 3. Based on different schemes, both may have significant impacts on cost.
Based on the above discussions, we can come to the following conclusions:
- The performance indicators of LiDAR depend mainly on the transmitting and receiving modules;
- The reliability mainly depends on the scanning module;
- The cost is determined jointly by both.
Therefore, continuously optimizing the transmitting and receiving modules based on selecting reliable and stable scanning modules will be the inevitable path for an excellent LiDAR.
The scanning module is fundamentally mechanical, and the reliability problems it brings need to be solved through engineering methods, mainly relying on time. In comparison, the barrier of the transmitting and receiving modules is the evolution of electronic technology, which is a barrier of technology + engineering. Therefore, technological innovation and research and development capabilities are crucial.
In conclusion, the transmitting and receiving modules are the ‘engine technology’ of the LiDAR industry.
Different Paths in the Evolution of the LiDAR Industry
What efforts have LiDAR manufacturers made to solve performance, reliability, and cost issues? Let us review the industry’s evolution.
As the founder of the industry, Velodyne Mechanical LiDAR has excellent performance parameters, achieving a 360° horizontal viewing angle scan and producing excellent point-cloud quality, making it popular among many Robotaxi projects. HDL-64 is a representative example.
However, mechanical LiDAR also has apparent problems.
The first problem is the expensive price. HDL-64’s price in 2016 was 80,000 US dollars. However, Velodyne did not intentionally sell it at such a high price. At that time, the transmitting and receiving modules were assembled from discrete components, with the material cost of each transmitting and receiving channel (a total of 64 channels) reportedly exceeding 100 US dollars. Additionally, the high labor cost caused by the device’s complex debugging and assembly processes ultimately resulted in a high selling price.
The second problem is that the discrete components that are manually assembled and calibrated make it difficult to maintain consistency.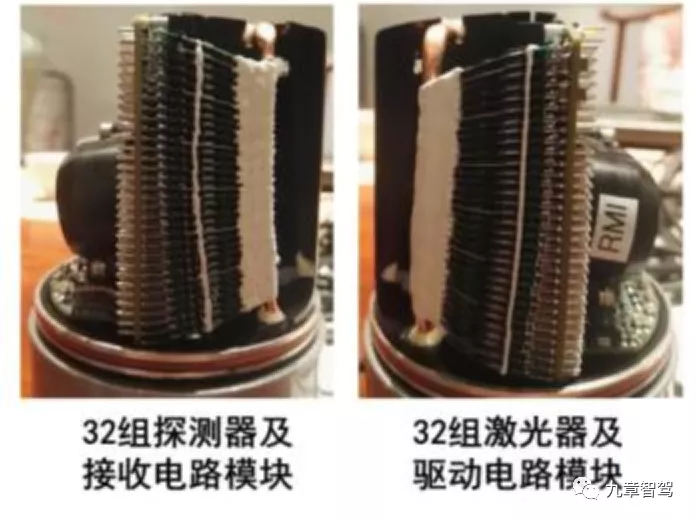
To solve the above problems, the industry began to evolve from mechanical LiDAR to mixed solid-state LiDARs. In this process, two technical routes emerged.
Route 1: Few Channels, 2D Scanning
This technical route reduces costs by reducing the number of lasers and using 2D scanning in scanning components (such as MEMS micro-mirrors, 2D mirrors, prisms, etc.) to achieve the effect of equivalent multi-line scanning.
The advantage of this solution is obvious, that is, the cost of the transmitter and receiver modules is greatly reduced. For example, the Innoviz’s first-generation LiDAR using MEMS micro-mirrors reportedly sells for around $1,000, which is 1/80 of the Velodyne HDL-64E, which sells for $80,000.
However, by compensating for the reduction in transmitter and receiver channels through innovative scanning structures, the more complex scanning structure also brings some downsides.
The first is reliability. The industry generally reflects that manufacturers using this technical route have not clearly demonstrated that they can pass vehicle regulations, and more are in a “quasi-vehicle regulation state”.
The typical representative of this route is the MEMS solution. Although MEMS is not a new technology and has been applied in other sensors on vehicles, the MEMS micro-mirrors used in other sensors are very small in size. In order to achieve a long detection distance, LiDARs require a larger reception aperture for the detector, and therefore, the size of MEMS micro-mirrors is also better the larger the better. However, the larger the size of MEMS micro-mirrors, the higher the requirements for materials and processes, and the greater the challenges to reliability.
Hesai once publicly released PandarGT based on MEMS technology in 2018, but later turned to a 1D scanning mirror solution, reportedly mainly because “the aperture of the MEMS solution is small and is not conducive to ranging”. Another industry player in MEMS, Innoviz, did not proceed smoothly in BMW’s mass production project, and there were even rumors of “unsmooth development progress”.
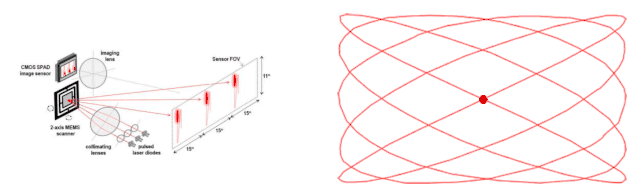
Another representative of this route is the 2D scanning mirror solution, which, as the name suggests, uses two scanning mirrors to scan in different directions.
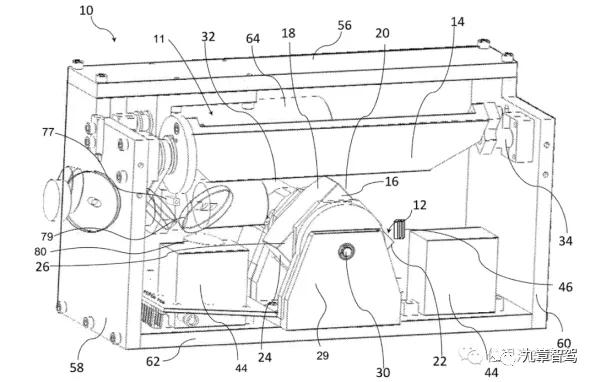
Luminar’s scanning component includes two scanning mirrors, with No. 12 in the figure indicating the horizontal scanner mirror and No. 14 indicating the vertical scanner mirror. The LiDAR to be installed on the NIO ET7 planned by Hesai is also a similar design. In fact, the prism solution used by Livox is essentially a 2D scanning solution.This two-dimensional scanning scheme inevitably requires one scanning mirror to rotate at high speed in order to cover the entire field of view. In fact, in a two-dimensional scanning scheme, the scanning frequency of the scanner often reaches several hundred Hz, and the motor speed reaches several thousand revolutions per minute. High speed has a direct impact on the service life of the motor, and it is difficult to meet the regulatory requirements. Meanwhile, the noise generated at high speed also needs to be overcome.
Secondly, there is an impact on performance.
As discussed above, the point frequency is determined by the number of lasers and the emission frequency of each individual laser. The two-dimensional scanning scheme greatly reduces the number of lasers and can only compensate by increasing the emission frequency of each individual laser. However, the point frequency of a single laser has an upper limit, so the total point frequency is still affected. To ensure the refresh rate, sacrifices can only be made in FOV or resolution.
In addition, due to the size of MEMS mirrors, the detection range of MEMS will also be affected.
Route 2: Multi-channel, one-dimensional scanning
The second technical route involves multiple laser channels and one-dimensional scanning to achieve the scanning. A typical technical route for this is the one-dimensional mirror solution. The scanning structure principle of this solution is relatively simple: keep the transceiver module stationary and let the motor reflect the beam to a certain range in space by driving the mirror, thus achieving scanning detection.
The scanning frequency of the one-dimensional mirror solution is generally not high (not exceeding 10Hz), and the solution has had examples verified by regulatory requirements and is highly reliable. The SCALA jointly developed by Valeo and Ibeo was put into mass production on Audi A8 in 2017.
However, the one-dimensional mirror solution is not perfect. The most typical problem is that the number of lines depends on the number of laser transceiver units. According to traditional paths, the only way to increase the “number of lines” is to stack laser transceiver units in large numbers. However, this will not only cause a proportionate increase in costs but also make the system large and complex. Therefore, Valeo’s SCALA 2 has only achieved 16 lines.
To address this challenge, the best solution is to integrate hundreds of laser transmitters and receivers on a few chips, and then through Moore’s Law, dramatically reduce costs and system complexity. Hesai’s mirror solution is a combination of one-dimensional scanning and chip integration.
How to Continuously Reduce Costs in the Industry
After discussing these two solutions, we will now discuss how hybrid solid-state radar can reduce costs.
Generally speaking, there are two ways to reduce costs: one is economies of scale, and the other is structural cost reduction.
Economies of Scale
Economies of scale refers to the laser radar manufacturers spreading the research and development costs by expanding the production scale, and reducing the material costs through large-scale procurement, both the transceiver and scanning modules of the laser radar follow this rule.
Structural cost reductionThe meaning of structural cost reduction refers to the cost reduction brought about by designing simplification and module integration.
(1)Limited cost reduction space for scanner module
The two-dimensional scanning mirror structure has limited optimization space since it must be a two-scanning structure. For example, the MEMS process-produced vibration mirror has already grown to several millimeters in size, and reducing the size further would lead to a further decrease in ranging performance. Since the size cannot be reduced, the space for cost reduction is also limited.
The one-dimensional mirror structure is inherently simple, and the space for cost reduction is also limited.
(2)Trend of chipization of electronic components in the receiver and transmitter module
The receiver and transmitter module includes various optical lenses, lasers, detectors, laser drivers, analog front ends, etc. Among them, there is no cost reduction space for optical lenses. The founder of a certain LiDAR manufacturer said, “In recent years, the price of optical lenses hasn’t changed much. Now, buying a high-quality lens still costs tens of thousands of dollars, and its performance is not much different than it was ten or more years ago.”
Therefore, the cost reduction of the receiver and transmitter module is mainly achieved by chipization of electronic components such as lasers, detectors, laser drivers, and analog front ends. And the chipization of these electronic components also drives the optical lenses to evolve into smaller sizes.
The trend of chipization of electronic components in the receiver and transmitter module is very obvious. In addition to Velodyne’s self-developed receiver and transmitter module chip mentioned above, other LiDAR manufacturers have also developed their own chips. Velodyne said that it had “completed the development of an 8-channel LiDAR ASIC chip” in its solid-state products, while Ouster also customized and designed its own chips, integrating VCSEL lasers and SPADs into a single ASIC chip to improve integration.
The trend towards chipization can let “Moore’s Law” to take effect in the LiDAR field. By integrating elements such as lasers onto a chip, material costs can be reduced while greatly reducing installation and debugging costs. In addition, semiconductor process technology can be continually improved to further reduce chip costs.
Before this, the cost reduction effect brought about by “Moore’s Law” had appeared in the camera field. Taking the example of the smartphone camera, over the past decade, under the premise of basically maintaining the total cost, the pixel of the smartphone camera has increased from 1 million to 100 million, and the average cost per pixel has dropped to 1/100 of the original.
Similarly, the trend of chipization of electronic components in the receiver and transmitter module of LiDAR allows for continuous increases in the number of lasers, and the point frequency of LiDAR is getting higher and higher, while the cost has not increased significantly.
Currently, the process of some manufacturer’s self-developed receiver and transmitter chips is at the level of several tens of nanometers. In the future, with the improvement of integration and process technology, there is still huge space for cost reduction.
For “small channel + two-dimensional scanning scheme”, although cost reduction can be achieved through chipification, the number of lasers in itself is small and the proportion of cost is not high, leading to limited cost reduction space.For the “multi-channel + one-dimensional scanning scheme,” the cost can be greatly reduced through chip integration due to the many laser channels involved.
Efforts in the Regulatory Direction
Currently, the easiest scenario for mass production of LiDAR is in the forward installation of autonomous vehicles, which is the battlefield where major LiDAR manufacturers are striving. To achieve mass production in forward installation, it must comply with regulatory requirements.
The industry is talking about regulatory compliance, and even many manufacturers “self-proclaim” to have achieved it. What exactly is regulatory compliance?
Regulatory compliance refers to the ability to pass a series of certification tests by automakers, have the project designated, and start mass production. Automakers have a complete and systematic testing and verification system, especially global brands, whose testing system is complete and test conditions are harsh. Those who have passed their certification have strong credibility in the industry. At present, the only LiDAR product recognized by the industry as meeting regulatory compliance is the SCALA series by Valeo.
Under the trend of chip integration for the transmitter and receiver modules, chip integration has improved consistency and reliability compared to previous discrete components. The overall risk is manageable and the certainty is higher.
For the scanning module, the one-dimensional scanning scheme has already been verified by Valeo and is mature and highly reliable. For the two-dimensional scanning scheme, it is more complicated in design and involves high-speed scanning components, so its reliability is still controversial.
Chip Integration is the future trend and technological barrier in the development of LiDAR
Let us return to the problem raised at the beginning of this article – in the field of LiDAR, just like engine technology in the automotive industry, what is the core technological barrier?
The real core barrier will not be easily invalidated as the technological route evolves. Although the scanning scheme has been changing as LiDAR technology has evolved from mechanical to hybrid solid-state to pure solid-state, the electronic architecture of the transmitter and receiver modules can match different scanning schemes by just fine-tuning and meet the FOV (Field of View) requirements of different scenarios.
For example, the robotaxi market requires a 360-degree horizontal FOV, so the transmitter and receiver module can be combined with mechanical LiDAR for 360-degree scanning. The ADAS (Advanced Driver Assistance System) market needs a small LiDAR with a certain field of view, so it can combine MEMS, one-dimensional mirror, or two-dimensional mirror scanning schemes to achieve horizontal scanning of 120 degrees. However, no matter how these modules are combined, the underlying transmitter and receiver system remains fundamental, just as the engine technology continues to play a core role despite changes in annual car models.
In addition, after a scanning scheme’s reliability has been verified in the market, LiDAR manufacturers can quickly switch to that scanning scheme for their transmitter and receiver modules. In fact, major LiDAR manufacturers have technology reserves in different scanning schemes: Hesai has done mechanical scanning and has explored the MEMS scheme. They have currently selected the one-dimensional mirror scheme for hybrid solid-state. DJI’s Livox has also explored the MEMS scheme despite ultimately selecting the prism scheme. Surestar Juchuang has done mechanical and MEMS scanning, and Huawei has patents and technology reserves in the MEMS direction despite adopting the one-dimensional mirror scheme.According to the analysis presented above, “Nine Chapters Intelligent Driving” believes that: the receiving and transmitting electronic system, which determines the performance of the LiDAR, is the core barrier of LiDAR. The chipization of the receiving and transmitting system is the concentrated embodiment of the core barrier of LiDAR.
The chipization of receiving and transmitting module, under the influence of Moore’s Law and through automated process, constantly improves the consistency and reliability, continuously reduces material costs exponentially, and thus helps the mass production of LiDAR and accelerates the commercialization process of the autonomous driving industry.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.