
Challenges Faced by Satellite Navigation System in the Automotive Industry
With the increasing importance of autonomous vehicles in the automotive industry, the accuracy of traditional satellite navigation is not sufficient to meet the requirements of automated driving and vehicle-to-everything (V2X) scenarios. The complexity of unmanned driving system functions is rapidly increasing from the current advanced driver assistance system (ADAS) level L2 to semi-automatic driving, and then to full automatic driving (AD) in the future. Correspondingly, there are two major challenges.
Challenge One: Hardware-in-the-Loop (HiL) for Satellite Navigation
Verifying automated driving and V2X functions under various possible conditions and changes poses significant challenges to the automotive development field. For example, functions such as automatic emergency braking (AEB) and adaptive cruise control (ACC), or even full automatic functions under highway autopilot conditions, require extensive functional and non-functional verification and optimization of vehicles under a variety of scenarios and configurations.
Currently, there are mainly two methods for ADAS and AD verification: driving tests on public roads or test tracks, and hardware-in-the-loop (HiL) or vehicle-in-the-loop (ViL) tests based on hardware.
Challenge Two: High-precision Satellite Navigation
The GNSS market is rapidly developing due to many driving factors. The emergence of vehicle-to-everything (V2X) and unmanned driving has caused the requirements for in-vehicle navigation systems to continuously increase from the initial standard positioning system (SPS) requirement to the current high-precision positioning system (PPS) requirement.
Real-time Satellite Navigation Simulator

The SMBV100B and SMW200A are high-performance and cost-effective universal vector signal generators, boasting excellent radio frequency indicators and support for almost all communication and broadcasting standards. They support GPS, Glonass, Galileo, and BeiDou by configuring one or more optional accessories, and are universal satellite navigation simulators.
The R&S satellite navigation simulator provides a powerful and reliable single-table solution for receiver testing, offering the following key features:◾ Real-time satellite navigation simulator, supporting all GNSS frequency bands, including L1/L2 and L5, and capable of producing navigation signals for all frequency bands on a single instrument simultaneously;
◾ SMBV can support up to 102 satellites, and SMW can support up to 612 satellites;
◾ The simulator supports custom or predefined trajectory files, as well as various geographical locations;
◾ Supports real-time HiL simulation with a data update rate of up to 100Hz;
◾ Can simulate blocking effects in dynamic scenes and multipath effects in static scenes;
◾ Supports atmospheric and other scene models;
◾ Single-instrument solution: no external software or computer is required.
General Automotive Satellite Navigation Receiver Test Solution
General Method for Testing Automotive Satellite Navigation Receivers
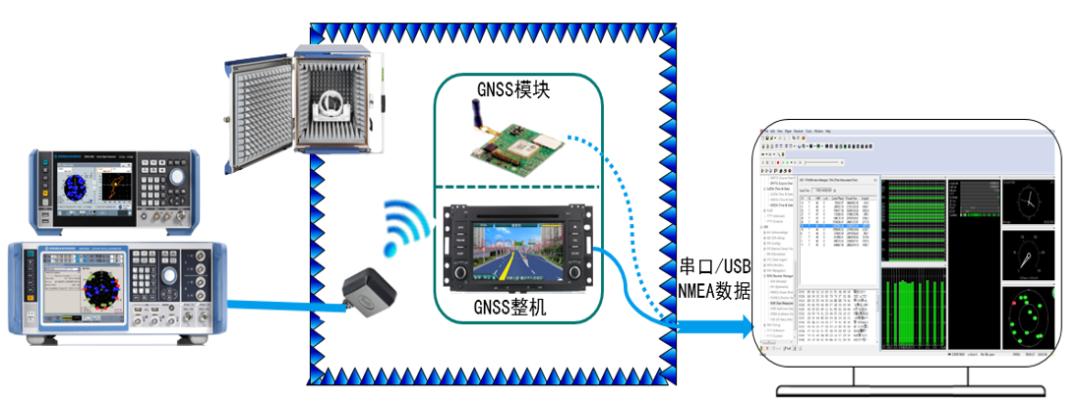
If the in-car navigation receiver or module itself can be connected directly via an RF cable and provides NMEA data output via a serial port, direct connection testing can be performed. The advantage of this method is precise power control and shielding against external interference. If the in-car navigation receiver has already been manufactured and cannot provide a direct RF interface connection, an OTA air interface testing method can be used. As shown in the following figure:
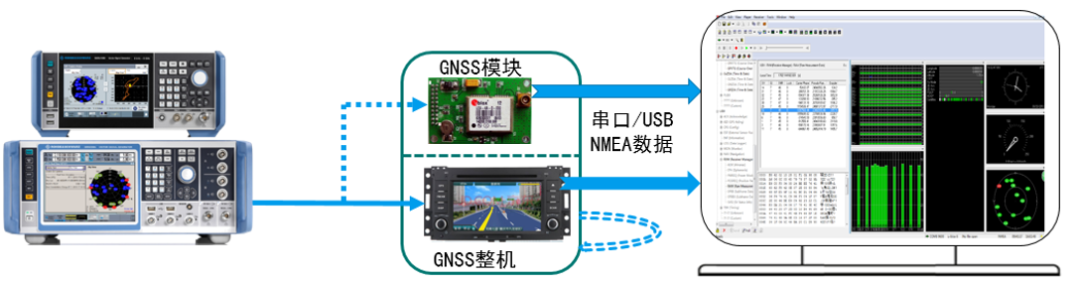
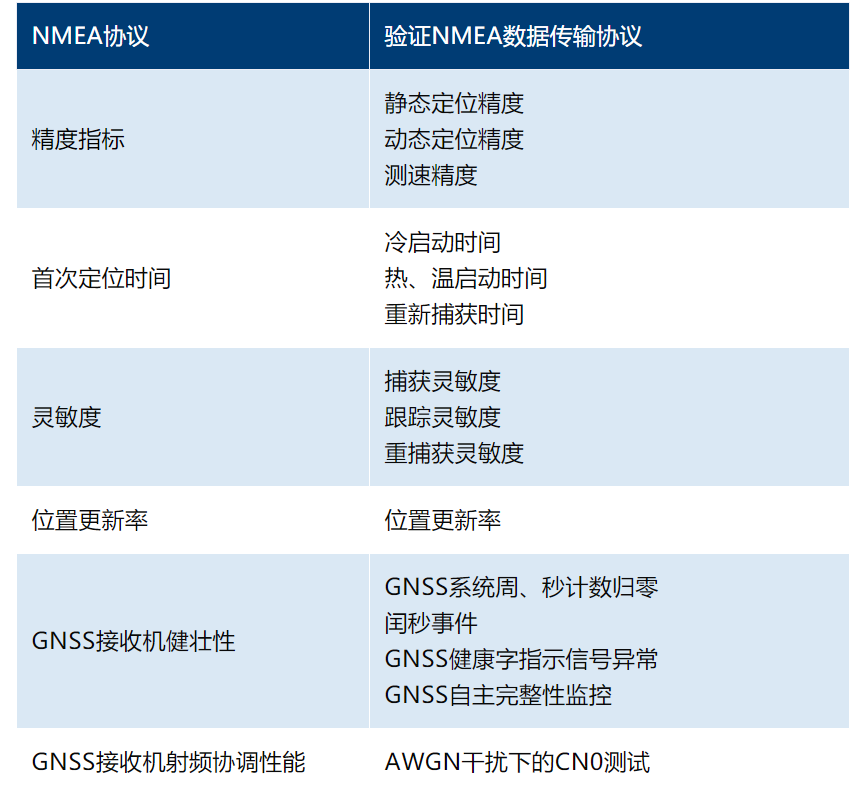
Automotive navigation receiver test items
High-precision GNSS Satellite Navigation Test Solution
GNSS Multi-frequency Navigation Receiver Test Solution
The GNSS multi-frequency receiver can simultaneously receive carrier signals of multiple frequencies from the same navigation signal. By utilizing the differential effects of ionospheric delay on multi-frequency carrier signals, the effects of ionospheric delay on electromagnetic wave signals can be eliminated. Therefore, the GNSS multi-frequency receiver can be used for long-distance precision relative positioning. In addition, GNSS multi-frequency receivers can accelerate the resolution of ambiguity on whole weeks by observing on two or more frequencies.
SMW200A or SMBV100B can generate multi-frequency signals with a single instrument. As shown in the following figure, the testing block diagram of arbitrary frequency combination of L1/L2/L5 is implemented through SMBV100B:
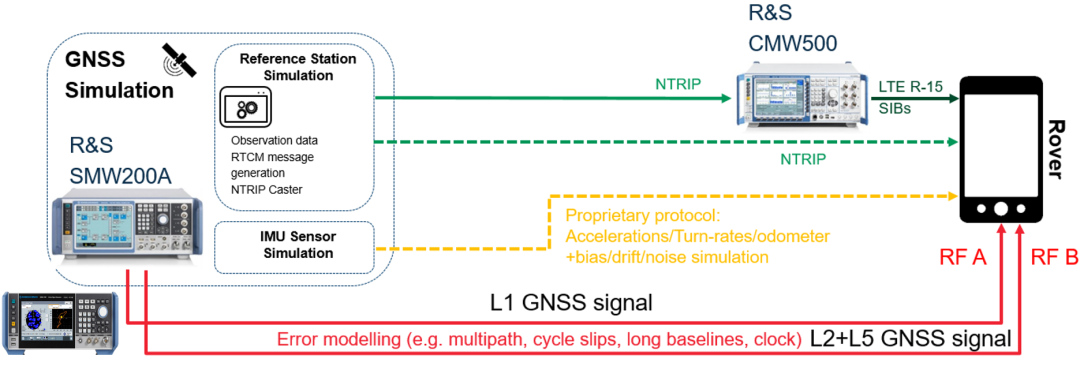
RTK Testing of Real-Time Carrier Phase Dynamic Differential Receiver
Real-Time Kinematic (RTK) is a differential method that processes the carrier phase observations of two measurement stations in real time, and sends the carrier phase collected by the reference station to the user receiver for difference calculation and coordinate determination.
Such receivers, which have high-precision positioning capabilities, mostly use dual/multi-frequency receivers to improve positioning accuracy. At the same time, in the process of transmitting correction data, there are private networks and public networks. The private network is mainly communicated through ASK/FSK/WLAN, and mostly works in the ISM band, such as 433MHz. The public network is mostly based on the mobile communication network of operators, such as GSM, LTE, etc. The test diagram is as follows:
Hardware-in-the-Loop (HiL) Testing for Automotive Navigation Hardware
Hardware-in-the-loop is a testing method in which the Device Under Test (DUT) or System Under Test (SUT) is embedded in the simulator system, which primarily simulates the real environment of the device or system in real-time, allowing real-time evaluation of its performance in the entire system in a closed loop. Part of the HIL testing is the simulation of GNSS satellite signals. For this purpose, GNSS simulators are used, such as R&S SMBVB or SMW, as shown in the figure below:
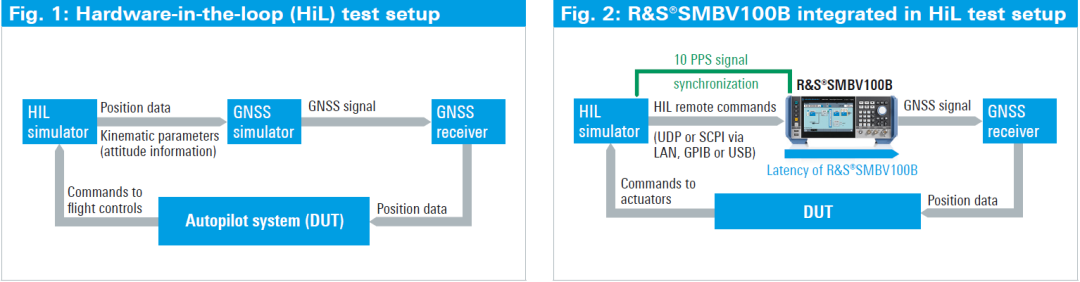
All R&S GNSS simulators can be remotely controlled in real time and integrated into dynamic HIL environments. In the GNSS HiL simulator, position data and dynamic parameters such as velocity, acceleration, and jerk can be indicated, while the GNSS simulator can adjust the simulation motion in real time and without signal interruption. It can also handle vehicle attitude information, such as pitch, roll, and yaw values for HiL simulation. In HIL applications, the data update rate of the SMBV and SMW of up to 100Hz and processing latency as low as 20ms jointly ensure high processing efficiency and signal accuracy.
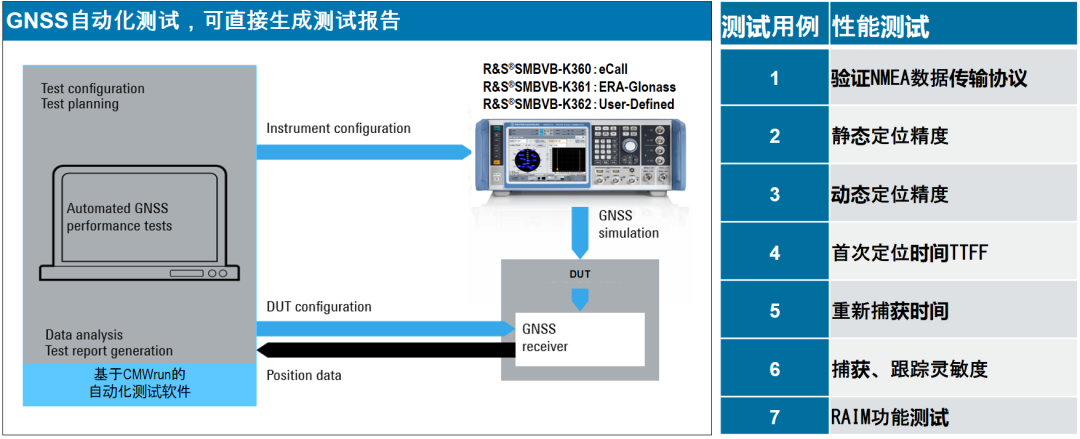
Automated Testing for Automotive NavigationR&S SMBV100B/SMW200A both support automated testing, which can be manually controlled on the operating interface or remotely controlled. Remote control requires the SMBV to be connected to the host computer via LAN, GPIB or USB. The test plan is as follows:
Conclusion
This paper describes a series of typical vehicle navigation receiver verification tests using GNSS satellite simulators, including basic satellite navigation positioning tests, high-precision satellite navigation positioning tests, and HiL testing schemes for vehicle satellite navigation hardware. The standard GNSS signal simulator used in the GNSS receiver test environment can provide engineers with maximum flexibility to help them implement adjustments and controls, and easily perform repeat tests.
In this environment, the tests listed in this paper will create a verification process standard for testing and verifying vehicle navigation receivers. The flexible signal source not only supports GNSS receiver testing, but also supports testing of other wireless formats and standards.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.