Author: Yin Wei
Currently, the development of autonomous driving often falls into the logic of “engineering-oriented” thinking, while the “product-oriented” thinking is still relatively underdeveloped. The autonomous driving industry has many product categories, but there is often a problem of “using a hammer to find a nail,” which is a lack of product thinking. Autonomous driving often uses autonomous driving levels to divide, but this is not appropriate. The level actually reflects the increase in difficulty caused by complexity, harm, policy restrictions and other factors.
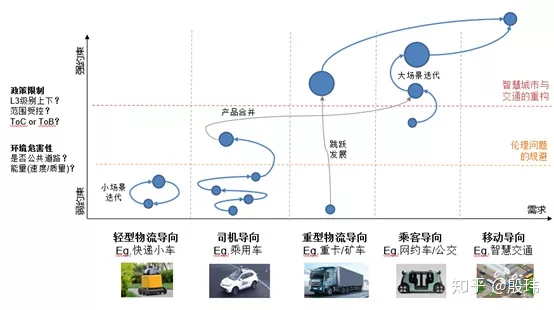
In my opinion, this constraint can be attributed to two levels: one is the ethical avoidance problem of a single autonomous driving car, and the other is the reconstruction problem of building smart transportation with multiple autonomous driving cars. In addition, when looking at product design, we should pay more attention to the subject of the demand, which is often ignored. The focus of each category is clearly different, so there should be some differences in the entire product design.
First, there are park express delivery carts, this type of application often does not need to overly concern the division of levels. If it must be divided, it can be directly regarded as L5 level, but the prerequisite is very strict. Compared with other public road autonomous driving, this type of autonomous driving application faces smaller challenges and is the most suitable field for software algorithm-oriented companies. This type of product often re-designs the entire vehicle platform’s hardware and software for low-quality item delivery, and from the delivery of each company’s product, the product positioning is relatively clear.
Similar to the express delivery carts, but facing the problem of delivering larger quality goods, there are unmanned container trucks or unmanned mine carts. The development path of this type of product will be somewhat different. Currently, the development of AEB for freight trucks has just begun, which is actually influenced by passenger car design, but the situation is not optimistic according to personal analysis. Due to the huge inertia of freight container trucks and other vehicles, the response time is extremely high. In the absence of long-distance environmental prediction, neither the driver nor the autonomous driving system can make effective decisions. The sensor performance widely used in L2-level autonomous driving does not meet the requirements for long-distance prediction, so the development of this type of autonomous driving system must cross L1-3 and focus on designing the overall system at the L4 level. From a product thinking perspective, the design of assisted driving systems for trucks is very embarrassing, and there are also unclear issues in the design of autonomous driving for trucks, especially the integration problem of smart logistics processes.
The most easily confused product types are assisted driving for passenger cars and autonomous driving for ride-hailing cars. Understanding these two products also constitutes the two main paths of autonomous driving development. In 2014, during the initial development of autonomous driving, two mainstream factions were formed.
One faction, represented by Waymo, advocates “high attack”, and a “One Finger Zen” tactic directly cut off the path of human drivers by entering at the L4 level. Profits are made by saving labor costs.
One faction, represented by Tesla and other companies, is accumulating strength and momentum, with a hidden power just like the “Toad Skill” in martial arts. Starting from L2, these companies accumulate data for the next generation of products through staged development of intelligent driving products, iteratively enhancing profitability while gradually moving up the market.
Waymo’s R&D focus has gradually evolved towards the development of Robotaxi, while Tesla’s R&D focus has gradually evolved towards the development of high-level assisted driving.
Among them, the development of high-level assisted driving for passenger cars is the most concerning. In the past, many people questioned whether the automatic driving bubble would burst. I believe it won’t, because there is a commercially viable business model for the development of high-level assisted driving for passenger cars, and Tesla has proven this. Even if autonomous driving is ultimately proven to be a false proposition, autonomous driving products that are close to human abilities can still accumulate enough research and development data and cash flow for these companies to continue their efforts towards this goal, and this cycle will not stop. From a product perspective, the core requirement of high-level assisted driving is still the “driver”, so the design of the entire car product still has a coherent idea. We can see that there is no bubble in the process of developing from high-level assisted driving to autonomous driving.
In contrast, Waymo’s approach is somewhat worrying. The focus of the RoboTaxi application has always been the “passenger”. Although there are many real-world constraints, there are few autonomous driving product designs that think from the perspective of the “passenger”. Here, we cannot fail to mention zoox. Designing from the perspective of the passenger from the beginning of the entire vehicle design demonstrates a strong product mindset. However, the current solutions that rely on transforming passenger cars can only be considered as a transitional measure because L4-level products that are focused on the “passenger” are more important to continue the marketing of mobile travel services, rather than compromising with current engineering constraints and adopting traditional passenger car designs. The concept of Zoox is worth learning from, but it also reflects the difficulty of this product category. Its success or failure still needs to be tested with time.# Autonomous Driving Level L3 and Beyond
Autonomous driving at L3 level has special significance. Beyond this level, there will be issues related to liability and ethics, as represented by the first “ceiling” in the first image. At the L3 level, the position is akin to a “dam,” and the core logic for companies like Tesla is to accumulate and iterate, approaching L2.999 level in anticipation of a breakthrough to pour energy into L3-5.
On the other hand, Waymo’s approach is to dig a pond at the L4 level, develop a mobile travel service within a limited operating range, and wait for an opportunity to break through the second “ceiling.”
The system construction based on product thinking can help improve the maturity of autonomous driving. After breaking through the first constraint, Tesla will inevitably merge with the RoboTaxi product, as this represents the gradual disappearance of the demand center for “drivers”.
These are just some ideas for everyone’s reference.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.