Author: Yan zhi Auto
Definition of MRM
One of the basic requirements for autonomous driving human-machine interaction is that when users cannot respond to the takeover requests issued by the autonomous driving system in a timely manner, the autonomous driving system should execute the minimal risk maneuver MRM to ensure the safety of vehicle operation (refer to Autonomous Driving Human-Machine Interaction[4]: User takeover and active intervention).
The concept of the minimal risk maneuver MRM (Minimal Risk Maneuver) here originates from the functional safety standard ISO 26262. It is precisely defined as the measures taken by the driving automation system to reduce risk when the driving automation system or user cannot perform dynamic driving tasks or take over dynamic driving tasks.
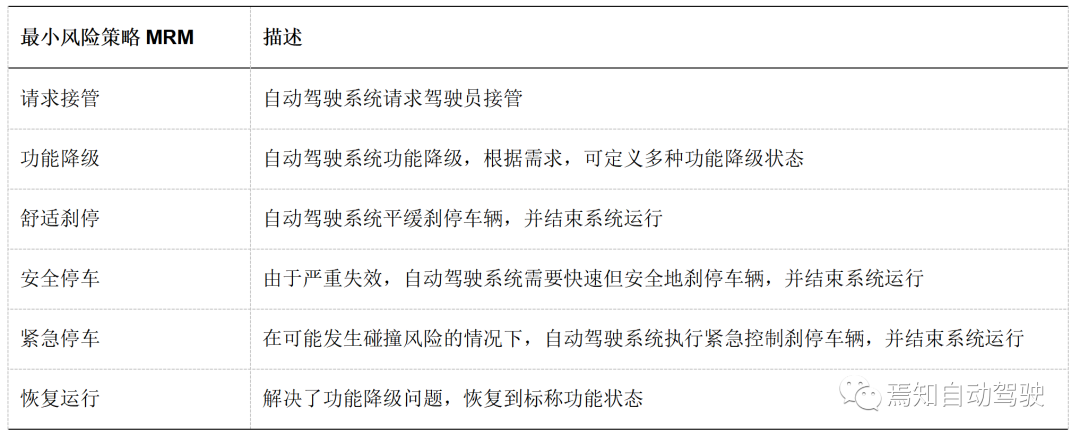
In the functional design of autonomous driving systems, multiple different minimal risk strategies MRM can be defined to adapt to different needs. Common MRMs are shown in Table 1 below.
Objectives of MRM
According to the definition of the minimal risk strategy MRM, the objective of MRM operation is to ensure the safety of vehicle operation. In the design of autonomous driving systems, “ensuring the safety of vehicle operation” means that the vehicle has entered into the minimal risk condition MRC. That is to say, in autonomous driving human-machine interaction, when users cannot take over the driving task in a timely manner, the system should be able to automatically execute the minimal risk strategy MRM, so that the vehicle can enter the minimal risk condition MRC.
The definition of the minimal risk condition MRC (Minimal Risk Condition) is: when the vehicle cannot complete the scheduled journey, the user or driving automation system performs and ultimately makes the vehicle accident risk reach an acceptable state. Common definitions of several minimal risk conditions MRC are shown in Table 2 below.
Table 2 Minimal Risk Condition MRC
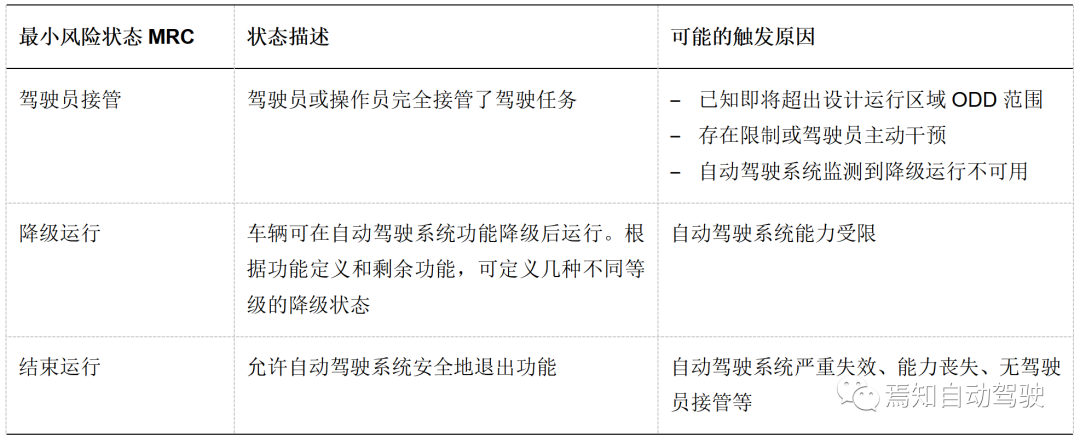
The three types of minimal risk conditions MRC in Table 2 can be divided into two categories: one is to end the operation, which means that the vehicle has stopped and the autonomous driving system has exited, and belongs to the final MRC; the other is driver takeover and degradation operation. Under such MRC, the vehicle still maintains operation and has not stopped, and may further switch to the final MRC.
As shown in Figure 1 below, the goal of MRM is to make the vehicle reach MRC. When there are multiple MRCs defined for the vehicle, corresponding different MRMs need to be defined to achieve the state transition of the vehicle from the nominal operating state to different MRCs or between different MRCs.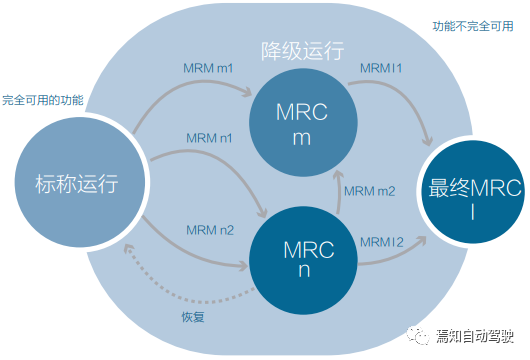
Ability and Strategy of MRM
The minimum risk strategy MRM is an important measure to improve the safety of autonomous driving systems. The ability to automatically execute MRM and the ability of MRM itself are important reference principles for the level of autonomous driving.
Ability of MRM
The minimum risk strategy MRM requires effective identification and judgment of risk mitigation, combined with the driver’s control status of the vehicle, to take necessary control measures. The perception, decision, and execution capabilities required by MRM include but are not limited to:
- Vehicle lateral motion control;
- Vehicle longitudinal motion control;
- Target and practice detection;
- Control decision-making;
- Vehicle lighting and signal device control;
- Remote information interaction.
The requirements of MRM capability for autonomous driving systems vary with the system’s level of autonomy, the design and operation area ODD, and the system architecture.
For example, the ENVS of polestar2 is 3R1V (1 forward-facing camera + 1 forward-facing mmWave radar + 2 rear-corner mmWave radars), which is not equipped with sufficient side-facing environmental perception sensors. Therefore, when the autonomous driving system encounters an exception and the driver cannot effectively intervene in the dynamic driving task, polestar2 can only achieve controllable deceleration or parking within a single lane, without the ability to achieve roadside parking or emergency lane parking across lanes.

Strategy of MRM
The rationality of the minimum risk strategy MRM greatly affects the safety of autonomous driving system users and external traffic participants. Therefore, in the design process of autonomous driving systems, it is necessary to “tailor” the specific content of the minimum risk strategy for different failure scenarios and combine the design solutions of autonomous driving systems. Extreme or overly conservative strategies will both have a significant impact on the safety of the operation of the autonomous driving system.
Hazardous Scenarios
Hazardous scenarios where the autonomous driving system may trigger MRM include:
- Failure or limitations of the autonomous driving system’s environmental perception function;
- The vehicle exceeds the definition range of the autonomous driving system’s designed operating area ODD;
- The driver monitoring system DMS confirms that the driver’s current status is abnormal and unable to perform the driving task normally;
- The planning and control unit or actuator of the autonomous driving system fails.
Execution StrategyIn the design of the autonomous driving system, multiple Minimum Risk Strategies (MRM) and Minimum Risk States (MRC) can be defined. When the vehicle encounters hazardous scenarios, the system can determine the appropriate MRM and its corresponding MRC to execute based on the severity of the scenario. See figure 3 for the execution strategy of MRM.

This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.